
轨道式垃圾回收机器人设计与分析
2020-04-24 10:56:12李阿为张广良
机械制造与自动化 2020年2期
李阿为,张广良
(西安航空学院 机械工程学院, 陕西 西安 710077)
0 引言
随着科技的进步,机器人行业也迅速发展,特别是双臂机器人已在灾难营救、科学考察、地质勘探等领域得到应用,对人类征服自然、了解地球、探索宇宙具有重要意义[1]。机器人将形成一个巨大的产业,对国家的综合国力和可持续发展有着深远的影响,是衡量一个国家制造业和科技水平的重要标志[2]。
裴文良等人设计了一种轨道式巡检机器人,讨论了巡检机器人数据采集系统的功能与结构,介绍了控制系统的软件设计方法[3]。周明静等人针对煤矿井下皮带运输机等设备巡检、监控问题,研制了一种轨道式、可代替人工巡检功能的矿用井下巡检机器人装置,利用该巡检机器人可以实现对煤矿井下皮带运输机、刮板机等大型设备的自动巡检,实现无人值守,从根本上减轻巡检人员的劳动强度,最大限度提升煤矿的安全管理[4]。胡楠等人针对配电房等室内电力系统供电设备自动巡检的需求,提出了以微控制器MSP430F5438为核心的自动巡检机器人控制系统总体设计方案,可以实现巡检机器人对配电房供电设备的自动巡检[5]。吴威等人为了解决传统的阀厅人工巡检方式所存在的效率低下、巡检覆盖率与及时性等无法得到保证的问题,开发设计了基于智能轨道的阀厅巡检机器人系统[6]。肖龙雪等人设计了一种内顶轨道驱动式课桌清洁机器人,主要面向高校教室常用的敞开式课桌的清洁作业。该清扫机器人能够进行自动化课桌清洁工作,对教室环境里常见的垃圾具有良好的清扫能力[7]。王化玲等人根据机器人巡检的工作状况及环境,开发了一种适于换流站巡检的组合式轨道机器人[8]。王嫦娟等人研究设计了一种收集装置,主要组成部分为垃圾集装箱、减速器、起重臂、电动推杆、链条链轮部装、丝杠螺母部装、定滑轮部装、张紧轮部装、电器及润滑系统等[9]。
随着我国高速公路的不断建设,目前我国高速公路总长已超过了13.1万公里,由于拥堵现象时常发生,导致了严重的垃圾问题。我国在清扫垃圾机器人方面已经有了许多研究,但基本上都是应用于家庭、公共场所等,在高速公路上清理垃圾的机器人还未有报道。面对这种情况,本文针对室外作业、高速公路的环境进行了轨道式高速公路专用垃圾回收机器人的结构设计,对其部分的结构进行了运动分析和功能性的运动仿真,然后从实际出发进行了结构设计与优化。
1 机械结构设计
机器人主要由机器人壳体、末端手爪、关节臂以及控制系统4个部分组成。机器人壳体是用来连接关节臂、垃圾回收装置、光伏发电装置以及悬挂装置,实现在高速路上不占用车道以及在防护栏上平稳地运行。末端手爪可以进行旋转以及夹持动作,其整个运动过程可以将路面上的易拉罐等垃圾夹住并放入垃圾回收装置中。关节臂由3段式组成,前2节关节臂可进行旋转,第3节关节臂进行偏转。本次设计的末端手爪以及关节臂主要是用来实现垃圾回收机器人抓取垃圾和放置垃圾的功能。运动时主要由悬挂装置将其悬挂在高速路路边双波形防护栏上,以双波形防护栏为轨道进行前进或者后退运动。其工作流程是由光伏发电供电,关节臂上的电机正反转控制机械臂的运动,使得末端手爪接近物品,末端手爪上的电机控制末端手爪的张开与闭合进行物品的夹持,然后放入垃圾筐中。轨道式高速公路专用垃圾回收机器人总装配图如图1所示。

1—悬挂装置; 2—收集垃圾装置;3—光合发电装置;4—电机;5—末端手爪手掌;6—驱动元件;7—驱动摇杆;8—手指;9—从动摇杆;10—转动元件;11—末端手爪滑动元件;12—末端手爪旋转装置;13—第3节关节臂;14—第2节关节臂;15—电机;16—第1节关节臂;17—电机;18—机器人轮子。图1 机器人的总装配图
机器人末端手爪由手指、驱动摇杆、从动摇杆、驱动元件、末端手爪手掌元件、转动元件、电机、滑动元件、旋转装置等元件组成,其运动过程是由旋转装置进行旋转,则末端手爪就可以夹持各种角度的物品(易拉罐),由转动元件带动滑动元件,从而带动驱动元件,由驱动元件带动驱动摇杆,则末端手爪进行张开与闭合运动。

1—手指;2—驱动摇杆;3—从动摇杆;4—驱动元件;5—末端手爪手掌元件;6—转动元件;7—电机;8—滑动元件;9—旋转装置。图2 机械手结构图
高速路常用护栏立柱高为1200mm、1500mm,立柱预埋为250mm~300mm,即关节臂到路面长1000mm左右。由此设计出零件尺寸,见表1。

表1 零件部分尺寸 单位:mm
第1节关节臂用来连接机器人以及第2节关节臂,其驱动方式是用电机连接轴直接驱动关节臂的运转,其运动方式为旋转;第2节关节臂负责旋转运动以及连接作用;第3节关节臂与第2节关节臂连接,第3节关节臂做偏转运动,并且与末端手爪相连,其相连处末端手爪有旋转装置。
2 仿真分析
本文设计的垃圾回收机器人是用于高速公路环境下进行垃圾清理的,由于人们在此环境下清理垃圾具有一定的危险性,本设计较好地解决了高速公路垃圾难处理的难题。
通过在UG软件三维建模及参数的设置,对垃圾回收机器人进行运动学仿真,仿真总时长是25s,总步长是100,具体仿真结果如图3-图6所示。为了更加直观地表现出各个关节的运动情况,初始状态的关节臂与末端手爪统一平行,基本上处于同一高度位置,即1.00 m,方便后面的运动与初始状态作比较。

图3 初始状态
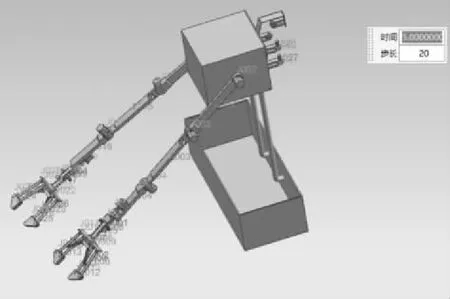
图4 第1关节臂旋转5 s后

图5 第2关节臂旋转5 s后

图6 15 s时末端手爪状态
由图3-图6的运动过程,求解了第1关节、第2关节和末端手爪的角位移曲线、速度曲线,具体变化趋势如图7-图12所示,且由图7和图8知第1关节角位移最大值为90.769 rad、最小值为84.728 rad,最大速度为34.964mm/s,0.25s时速度为6.643mm/s;同理可得第2关节、末端手爪的位移和速度数值。由表1零件部分尺寸,结合各关节臂尺寸及角位移情况可求解其运动作业范围,为回收机器人的设计提供了数值基础。

图7 第1节关节臂前5 s角位移曲线

图8 第1节关节臂前5 s速度曲线

图9 第2节关节臂10 s~15 s角位移曲线

图10 第2节关节臂10 s~15 s速度曲线

图11 末端手爪15 s~20 s旋转角位移曲线
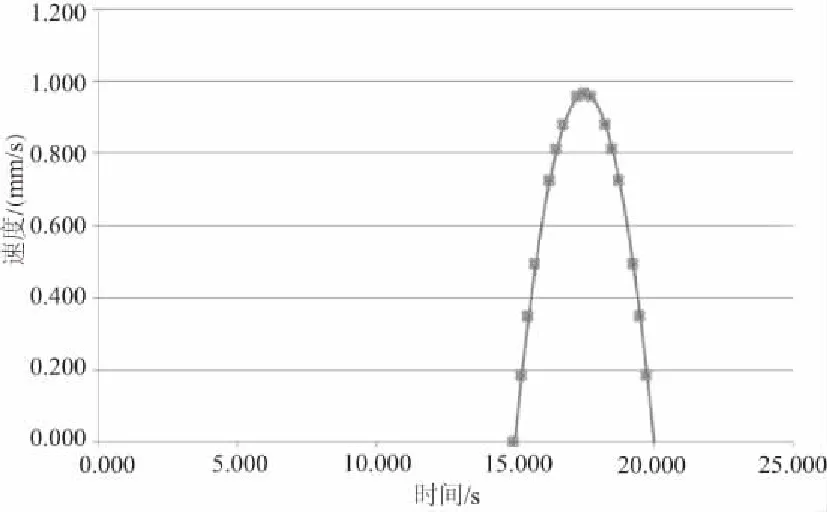
图12 末端手爪15 s~20 s旋转速度曲线
3 PLC控制
为实现机器人的自动化作业,选取西门子PLC来控制关节臂的运动、末端手爪的旋转及开合动作以及机器人整体在防护栏上的运行等。根据控制的需要,列出I/O分配表,如表2所示。

表2 I/O分配表
仿真结果说明:启动仿真程序处于运行状态,实时监控程序运行过程。按下启动按钮I0.0,程序开始运行,高速脉冲输出端Q0.0显示结果为运行状态,且发出高速脉冲。脉冲发生器一直处于发生状态,当某台电机动作的时候,其电机的脱开指令不动作,此时这台电机与驱动器完全接通,处于运行状态,其他电机则脱开指令动作,也就意味着其他电机不动作。图13为Q0.3和Q0.5通电,此时对应的电机M1和M3处于动作状态。若按下停止按钮I0.1时,脉冲发生器停止发生脉冲并且清零,则电机停止运转。仿真结果显示速度、加速度运行过程没有突变,运行平稳。
4 结语
本设计是针对高速公路上收集易拉罐等垃圾而设计一款收集的机器人。首先进行了机器人的结构设计,它是以防护栏为轨道沿着高速路运行,根据防护栏的高度以及尺寸大小进行机器人机构尺寸的设计,选择机械臂为3节式,机械手采用4杆机构,且可以做旋转运动。使用NX三维软件对机器人进行零件的建模以及整体装配,用运动仿真模块对机器人进行运动仿真,分析其可行性。用西门子S7-200进行控制系统的编程并进行了仿真,分析可行性。

图13 仿真结果示意图
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
电子制作(2018年24期)2019-01-03 02:30:30
荣誉杂志(2017年7期)2017-08-23 08:05:59
现代工业经济和信息化(2016年2期)2016-05-17 05:34:16
通信电源技术(2016年1期)2016-04-16 04:57:31
电子工业专用设备(2015年4期)2015-05-26 09:10:40
汽车维修与保养(2015年8期)2015-04-17 03:33:01
机械工程师(2014年12期)2014-12-23 06:44:04
