
自动送货机器人结构设计
2020-03-22 03:30董小雷李冬梅
机械工程与自动化 2020年1期
董小雷,李冬梅
(华北理工大学 机械工程学院,河北 唐山 063210)
0 引言
近年来,我国快递业发展迅速,企业数量大幅增加,业务规模持续扩大。但与此同时,快递业务的迅速增长也带来了诸多问题,其中末端配送环节更是成为快递服务质量提升的软肋。末端配送又称“最后一公里”配送,它是快递企业配送的最后一个环节,是实现物品从配送中心转移到消费者手中的关键环节[1]。
目前,快递末端配送存在的问题主要包括服务质量不高、配送时效性差、取货便捷程度低、包裹破损和丢失率高、大件配送难、配送车辆不规范等。而园区人口密集、管理森严,为保障居民的安全,通常禁止快递三轮车入内,再加上园区居民时间规律性差,接收快件时间不固定,而物业又不愿代收快件。作为园区“最后一公里”配送人员,其配送业务量较大,配送包裹内容复杂且分散,因无法准确把控收件人接收时间,导致二次配送较多。
本文基于这样的背景,研究设计了一种能实现园区内自主送货的自动送货机器人,有效地解决了园区“最后一公里”配送存在的一系列问题。
1 研究现状
1.1 国内研究现状
2017年6月18日,京东快递机器人进行了首次试运营。该机器人能够实现360°环境监测、自动避障、准确识别红绿灯、自主停靠配送点等功能。2018年4月,国内第一辆可实现电梯交互的苏宁自动送货机器人“卧龙一号”首次执行包裹配送任务。2017年8月,唯品会研制出智能快递无人车,拥有20个快递储存空间且可自由组合。该车能够独立完成订单配送的一系列过程,包括路径规划、自主导航、智能避障等。其中,最具代表性的是京东送货机器人,如图1所示。
1.2 国外研究现状
英国于2015年年底推出的第一台配送机器人Starship,载重为9kg,配送范围最远可以到物流中心方圆1.6km的地方。美国研发的Nuro机器人行驶区域广泛,其车身结构和材料都是为了最大程度上保护周围的行人而设计的。其次,Nuro配备冷藏和加热装置,可以满足不同物品配送需求。2018上半年,韩国推出一款Dilly食品配送机器人,主要实现食品配送任务。美国Nuro机器人如图2所示。

图2 Nuro机器人

图1 京东送货机器人
2 自动送货机器人整体结构的设计
自动送货机器人系统主要包括机械系统和控制系统两大部分[2]。机械系统是机器人系统的基础,执行控制系统发出的运动控制指令。自动送货机器人机械系统主要包括行走机构、底盘、快件厢柜、取货装置以及车体外壳。首先由SolidWorks软件绘制各部分结构的零件图,然后将其装配成一个整体。自动送货机器人整体结构如图3所示。
考虑到自动送货机器人的功能性和实用性,其机械结构应满足以下要求:
(1)结构简单合理,传动力求简单。
(2)具有较强的承载能力,能为后期添加的货物预留足够的承重空间。
(3)整车质量轻便、稳定性好,同时框架结构符合强度、刚度要求。
(4)尽量使用标准件,方便后期维修。
2.1 行走机构
机器人行走机构主要包括足式、履带式、轮式三种[3]。足式行走机构路面适应力强,可以行走、跳跃、上下台阶,但其设计和控制难度较大。履带式行走机构对松软和不平坦地面的适应能力高,但它转弯不灵活,容易损坏机体和路面光滑度。轮式行走机构自重轻、机构简单、驱动和控制相对方便,适合在平坦的路面上移动。综上所述,轮式行走机构相比较足式和履带式具有更好的综合性能[4]。
本设计选用四轮轮式行走机构,前两轮为主动轮,后两轮为从动轮,每个主动轮由电机单独驱动,通过两个主驱动轮的差速来实现转向[5]。同时,为了加大底盘空间布局,降低机器人自身重量,本设计将电动机整合到车轮中,变成轮毂式电动机,这种布局是通过电动机来直接带动轮子转动,缩短了电动机传递动力到轮子的作用路径。这种设计不仅简化了底盘结构,且具有传动效率高、运行平稳、结构连接方便等特点。
2.2 取货装置
取货装置的作用是实现货物的选取和传送。目前取货装置主要有机械手和货叉两种方式。机械手的智能化程度高,定位精确,运送过程平稳,但其自由度多,结构复杂,控制难度较大。货叉可以实现双向取货,结构简单,传动容易实现。本设计选用三级货叉取货装置,其主要包括水平移动机构、纵向立柱、货叉及载货台[6],其结构如图4所示。

图3 自动送货机器人整体结构

图4 三级货叉取货装置
取货装置工作过程如下:行驶过程中,取货装置不工作,处于预先设定好的初始位置。当取货装置接收到动作指令后开始工作,首先水平移动机构通过滑动导轨带动立柱、货叉及载货台定位到货物所在列,然后载货台连同三级货叉通过上升或下降的垂直运动定位到货物所在层,最后判别货叉的伸缩方向进行取货。取货过程中,立柱、上货叉和载货台的位移随时间的变化曲线如图5所示。
货叉采用三级直线差动式伸缩货叉,由下叉、中叉和上叉组成[7],其结构是根据货格尺寸和货架间的宽度来设计的,如图6所示。下叉固定在载货台上,其两侧有导向滑轮用于导向运动。动力装置安装在下叉上,通过传动机构驱动中叉相对于下叉运动,由于下叉、中叉和上叉之间采用了柔性同步带连接,当中叉相对于下叉以速度v运动时,中叉会以相同的速度带动上叉运动,使得上叉相对于下叉的速度为2v,从而实现三级货叉的伸缩运动。
2.3 快件厢柜
快件厢柜作为快件的载体,其结构对机器人配送量和安全性能都有很大的影响。本文所设计的快件厢柜与机器人本体配合使用,能够实现快件的合理存放、取货装置结构紧凑、取件口便于控制等目标,以满足存储空间利用率高、货物破损率低、能够自动控制等要求。快件厢柜结构如图7所示,由于主要是针对塑料袋、纸袋和小型纸箱包裹配送,因此左右两侧货架设置成三种规格尺寸,分别为275mm、400mm、325mm。货格的单位尺寸为100mm,每个快件单独存放在一个货格内的托盘上。每列货格间的托盘可以随意移动或拆卸,以实现大小包裹间的柔性存储。
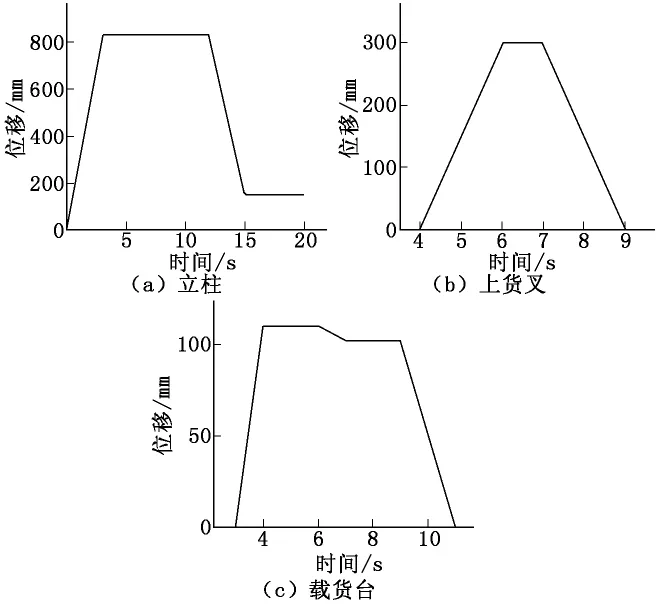
图5 立柱、上货叉、载货台的位移随时间变化曲线

图6 货叉结构
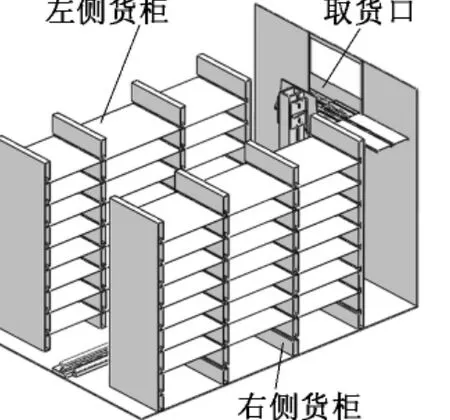
图7 快件厢柜结构
2.4 车架与底盘
车架类型主要包括边梁式、中梁式和无梁式[8]。边梁式车架一般由两根纵梁和若干根横梁通过铆钉或焊接方式连接。中梁式车架由一根中央纵梁和横向悬伸托架组成,其扭转刚度较大,行驶稳定性好,但缺点是制造工艺复杂,安装难度大。无梁式车架是指没有单独的车架,所有的总成和零部件都安装在车身上,由车身承受各种力和力矩。综合考虑,自动送货机器人采用边梁式车架。车架作为电机、底盘和车身中各主要总成的安装基体,承受着机器人的各种载荷和行驶时从车轮传来的冲击。应满足如下要求:
(1)有足够的刚度和强度。
(2)车架的质量尽可能轻,车架的高度尽量低以减小整车重心的离地距离。
由于机器人的底盘上要装载所必须的设备,因此自动送货机器人的底盘要具有一定的承载能力和运动能力。底盘布局如图8所示。送,还能用到生活中的很多方面,具有较广阔的发展前景。
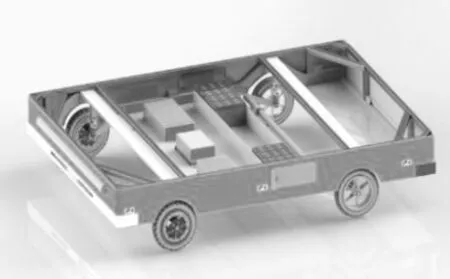
图8 底盘布局
3 结语
根据快递业的发展状况以及末端配送存在的一些问题,本文设计了一种结构简单、货物装载量大且可以在相对复杂的环境中作业的新型送货机器人。它极大地改善了园区内末端配送呈现的配送效率低、成本高、配送员劳动强度大等问题。由于机器人高度的可扩展性,未来自动送货机器人不仅可以用在末端包裹的配
猜你喜欢
科学技术创新(2021年15期)2021-12-01
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
物流技术(2020年6期)2020-07-20
金属加工(冷加工)(2020年6期)2020-07-09
建材世界(2020年1期)2020-05-24
设备管理与维修(2020年15期)2020-02-15
作文小学中年级(2019年11期)2019-12-04
现代营销·理论(2019年10期)2019-09-10
机电工程技术(2018年11期)2018-12-03
