
基于改进电压模型的感应电机无速度传感器矢量控制
2020-03-06 13:41:10张利军崔晓光咸粤飞
微特电机 2020年2期
胡 冰,张利军,崔晓光,咸粤飞
(中车青岛四方车辆研究所有限公司,青岛266031)
0 引 言
感应电机由于具有小型轻量化、结构简单、性能可靠等优点,在工程和工业场景中获得广泛使用。然而,由于其非线性、强耦合等特性,使得实现其高品质控制变得非常具有挑战性。
矢量控制作为一种流行的控制方法,其利用磁场定向,通过坐标变换实现对转矩和磁链的解耦控制[1-3]。矢量控制虽然从理论上降低了交流电机的控制难度,但是在实际操作中其控制效果并不理想。对实时参数依赖较高,需要外置速度传感器,增加系统成本的同时,也对系统稳定性造成一定影响。
针对这一问题,一些新型的无速度传感器控制策略相继被提出,并取得了显著成果。模型参考自适应方法,提高了系统对参数变化的鲁棒性,但是在低速时可能会导致观测器不稳定[4-7]。扩展卡尔曼滤波器方法[8-10]可以抵抗随机干扰和测量噪声的影响,但是用这种方法来辨识速度时,微处理器运算量较大。工程上以电压模型磁链观测器[11-12]居多,其方法简单、参数依懒性小、高速性能好,但是积分饱和、积分初值、直流偏置以及随机扰动和测量噪声等因素,会对其控制效果造成不利影响。
本文基于传统电压模型,提出了一种改进的磁链观测和转子转速估算方案。利用低通滤波器替代积分器,其截止频率可以随电机转速实时变化,从而消除积分环节对磁链观测的不利影响;并利用磁链参考值实时补偿观测误差,保证磁链观测的准确性。为消除测量噪声和随机扰动的影响,引入同步角频率的误差校正项和滤波环节,通过滑差迭代更新的方式保证参数估算的准确性。最后,仿真和DSP 实验平台验证了改进方案的有效性。
1 感应电机矢量控制原理
在两相MT 旋转坐标系下,采用转子磁场定向的控制策略时,存在ψrM=ψr,ψrT=0,则转子磁链方程可以改写:

同样,考虑转子导条被短接,于是有urM=urT=0,这样感应电机的电压方程可以进一步简化:

相应的转矩表达式可以表示:

结合式(1)、式(2),可以得到转子磁链和滑差角频率表达式:

式中:usM,usT和urM,urT分别为定子和转子电压矢量M,T 轴分量;isM,isT和irM,irT分别为定子和转子电流矢量M,T 轴分量;ψsM,ψsT和ψrM,ψsT分别为定子和转子磁链矢量M,T 轴分量;ωe为同步角频率;ωr为转子角频率;Rs和Rr为定子和转子电阻;Ls和Lr为定子和转子电感;Lm为定转子互感;Tr=Lr/Rr为转子时间常数;p 为极对数;p 为微分算子。
式(3)~式(5)组成了基于转子磁场定向的矢量控制模型,可以实现磁链与转矩的解耦控制。
2 改进转子磁链观测器设计和转速估算
基于传统电压模型,设计改进转子磁链观测器,并通过滑差迭代更新的方式进行转子角频率和同步角频率估算。
2.1 改进磁链观测器设计
由感应电机数学模型,获取定子磁链表达式:

传统方法采用一阶低通滤波器来代替上述的积分器,有效抑制了积分器中的直流偏移,得到定子磁链观测器表达式:

式中:ωc为一阶数字低通滤波器的截止频率。
在传统方法基础上,设置截止频率ωc根据当前运行频率实时调整,得到定子磁链观测器表达式:
式中:ωe为同步角频率,采用估算值;f(ωe)为同步角频率对截止频率的调整函数。
为了进一步改善感应电机低速运行性能,利用转子磁链参考值实时补偿观测误差,通过转子参考磁链幅值获取定子参考磁链幅值。转子磁场定向控制策略下,转子磁链参考值可得:

经Park 反变换,得到两相静止坐标系下的转子参考磁链幅值和定子参考电流幅值:
式中:ψrref为转子磁链参考值;ψrMref和ψrTref为转子磁链参考值M,T 轴分量;ψrαref和ψrβref为转子磁链参考值α,β 轴分量;isMref和isTref为定子电流参考值M,T轴分量;isαref和isβref为定子电流参考值α,β 轴分量;θe为电机同步位置角。
由上述推导可得定子磁链参考值α,β 轴分量:
式中:Lσ= Ls- Lm为电机漏感。
定子磁链补偿量通过定子磁链参考值经一阶高通滤波器获取,补偿量可以表示:

可见,观测的定子磁链幅值由低通滤波器的观测输出和定子磁链参考值的高通滤波值求和获得:
根据估算得到的定子磁链幅值计算转子磁链:

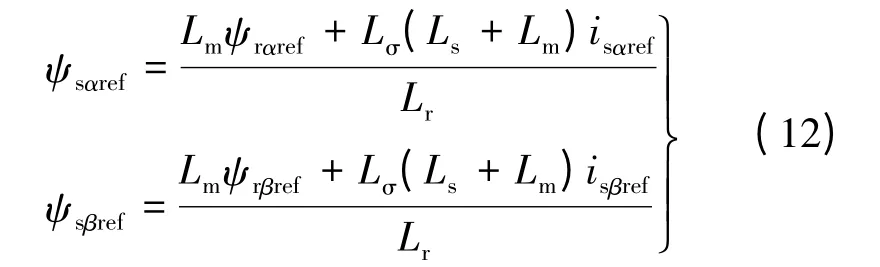
最终得到转子磁链幅值和相位,设计转子磁链幅值观测器,如图1 所示。
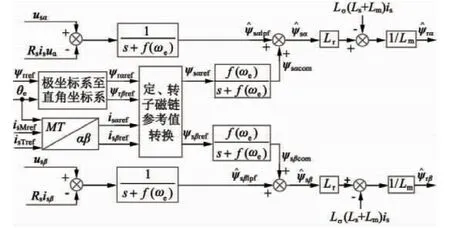
图1 改进转子磁链幅值观测器
为了保证直流抑制能力,调节磁链观测器截止频率时需要设置下限值,采用同步角频率一次函数的形式获取截止频率:

式中:k 为比例因子。通过Bode 图分析、MATLAB仿真和实验调试,确定截止频率下限值ωcmin,通常情况下选取k=0.1,ωcmin=10 rad/s。
2.2 滑差迭代更新的转速估算方法
通过基于改进电压模型的方式已经获得转子磁链信息,传统方式通常可以采用反正切的方式获取磁链矢量角度,即电机同步位置角:
再对同步位置角微分获取电机同步角频率,进而获取电机转子角频率,但是该方式受电压模型的影响较大,若磁链观测器存在微小噪声干扰时,通过反正切和微分方式就会导致比较严重的估算转速偏差。考虑上述方法的明显缺点,我们引入滤波环节和误差校正项,通过不断更新转差角频率获取同步角频率和转子角频率,进而获取同步位置角。
设定当前同步角频率估算值为ωeg,引入误差校正项ωeerr,并增加一阶滤波环节,获取下一个状态预测同步角频率ωelpf,即:
式中:K 为0~1 之间可变滤波系数,一般取为0.5;当ωelpf>ωeg时,ωeerr为正值,当ωelpf<ωeg时,ωeerr为负值,当ωelpf=ωeg时,ωeerr为零。
根据改进电压模型的磁链幅值观测方法,获取转子磁链观测值在两相静止坐标系的分量,,以及转子磁链幅值可以得到同步位置角的三角函数值,进而通过Park 变换获取定子电流观测值M,T 轴分量,即:


式中:isα,isβ由三相定子电流ia,ib和ic经Clarke 变换得到。
在转子磁场定向矢量控制策略下,可得转差角频率估算值,计算获取转子角频率估算值:

通过真实转差角频率获取当前时刻的同步角频率估算值,并积分获取同步位置角:

至此,同步角频率、转子角频率和同步位置角全部获取,可以实现转速闭环矢量控制。
基于上述分析,设计基于改进方法的无速度传感器矢量控制系统框图,如图2 所示。外环为转速环,转子角频率和同步位置角由本文的改进磁链观测器和滑差迭代更新的方法获得;内环为电流环,电流PI 环输出参考电压经过SVPWM 调制和死区补偿后产生变频器控制信号控制感应电机,维持设定转速,并对负载转矩快速响应。

图2 基于改进方法的矢量控制框图
3 仿真和实验验证
3.1 仿真结果与分析
为了验证本文控制策略的有效性和优越性,基于感应电机对拖实验平台的电机参数,利用MATLAB/Simulink 搭建感应电机无速度传感器矢量控制模型,进行仿真验证,仿真所用主要参数如表1所示。
设置目标转速为60 r/min,通过与传统LPF 磁链观测、微分求取转速方法对比,验证本文改进算法在电机低频段的观测性能。
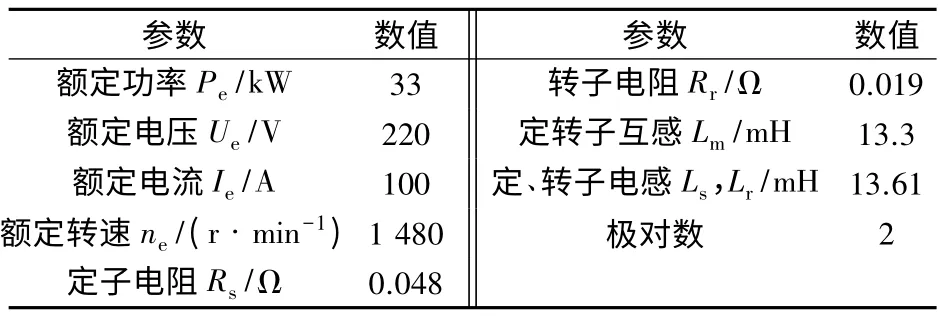
表1 仿真和实验所用电机参数
图3(a)、图4(a)为传统方法,图3(b)、图4(b)为本文改进方法。传统LPF 方法在低频段存在较大的估算误差,并且受截止频率的影响,磁链幅值存在衰减,通过微分求取转速方式易受到噪声干扰出现尖峰毛刺,会导致起动瞬间存在较大的电流冲击和无法带重载起动等问题。对比传统方法,本文改进方法转子磁链观测值经过短暂的调整迅速达到稳定,并且几乎不存在幅值和相位的偏差,估算转速准确,闭环控制效果良好。

图3 转子磁链观测值

图4 转速观测和闭环控制
为验证本文的控制策略在全转速范围的矢量控制效果,设置目标转速为1 500 r/min,0.1 s 至1.6 s预励磁,5.2 s 加额定负载转矩215 N·m。图5 为转速曲线,图6 为定子端电流,可见全速范围内转速估算准确,闭环控制效果良好。
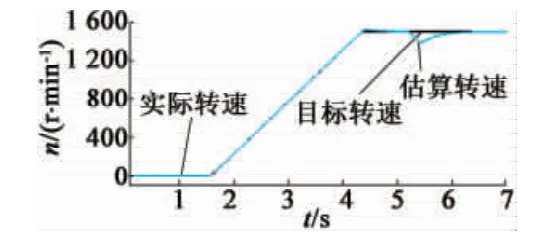
图5 转速观测和闭环控制转速
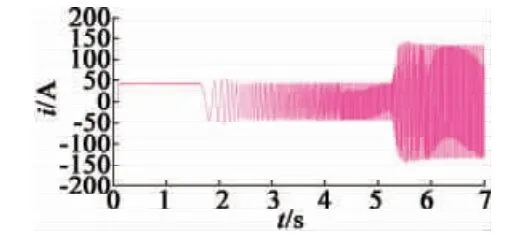
图6 改进方法的定子端U 相电流
3.2 实验结果与分析
通过对拖实验平台对所提出的改进控制策略进行验证,采用TI 公司的TMS320F28335 芯片实现控制算法。图7 为带200 N·m 转矩零速起动电流波形,图8 为额定转速、额定转矩稳态运行定子电流波形,输出电流稳定无冲击,可见控制效果较好。

图7 负载转矩200 N·m带载起动定子电流
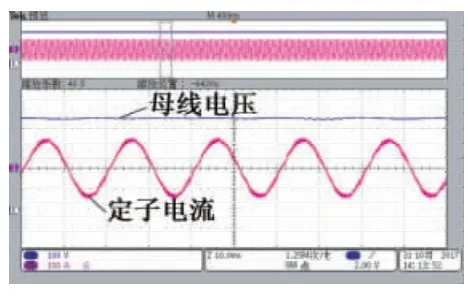
图8 转速1 480 r/min、负载转矩215 N·m稳态运行定子电流
4 结 语
本文基于传统LPF 方法,提出了一种改进的磁链观测和转子转速估算方案。利用低通滤波器替代积分器,其截止频率可以随电机转速实时变化,从而消除积分环节对磁链观测的不利影响;并利用磁链参考值实时补偿观测误差,保证磁链观测的准确性。为消除测量噪声和随机扰动的影响,引入同步角频率的误差校正项和滤波环节,通过滑差迭代更新的方式保证参数估算的准确性。最后,Simulink 仿真和DSP 实验平台验证了改进方案的有效性。
猜你喜欢
电力自动化设备(2021年11期)2021-11-20 08:33:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:42
广东电力(2020年1期)2020-03-03 10:13:24
医学新知(2019年4期)2020-01-02 11:03:54
物理教学探讨(2018年9期)2018-12-27 11:10:20
魅力中国(2016年50期)2017-08-11 02:21:11
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
现代检验医学杂志(2015年1期)2015-02-06 01:59:23
电测与仪表(2014年23期)2014-04-04 12:08:30
