CEEMDAN辅助快速谱峭度图算法的轴承故障诊断
2020-02-11 04:41吉南阳王丽君
机械工程师 2020年1期
吉南阳,王丽君
(华北水利水电大学机械学院,郑州450045)
0 引 言
滚动轴承微弱的故障信号通常淹没在噪声中,这使得故障信号中的有用成分很难被提取出来。经验模态分解(EMD)能够将非线性、非平稳的信号分解成一系列的固有模态函数(IMF),是一种自适应时频信号分析方法[1],此方法在对振动信号特征提取中已被广泛应用,但如果故障信号存在间断的跳跃变化时,会使得EMD分解中产生模态混叠现象,导致分解得到的IMF失去意义[2]。在EMD分解的基础上出现了集合经验模态分解方法(EEMD)。EEMD是通过给信号添加白噪声来改变信号的极值分布,然后再进行模态分解,从而消除EMD方法分解导致的模态混叠现象,但这种方法分解所得的IMF分量往往带有噪声残差。而且添加白噪声给原始信号再分解可能会生成不同数量的IMF分量,这些分量很难平均[3-4]。为了抑制和消除噪声对结果的影响,可以通过多次实验的方式,但是实验次数的增多也会增加计算工作量,而且分解得到的IMF分量中始终含有噪声余量。文中选用自适应噪声完全集合经验模态分解(CEEMDAN)方法[5],在EEMD算法的基础上做了改进,将自适应的白噪声添加到分解IMF分量的每一阶段,通过计算唯一的余量信号获取每个模态函数IMF分量,这使得分解的过程具备完整性,从而减少了计算其均值的次数,进而利用其重构信号的误差也接近为零,同时还可以很好地削弱轴承信号中的噪声含量,成功改进了EEMD算法在分解模态函数中的不足[6],具有一定的优越性。
谱峭度(Spectral Kurtosis,SK)的基本原理是在每个频率下计算其对应的峭度值,从而提取出各个频率下发生瞬态现象的频带[7-8],Dwyer最早提出了这一概念。文献[9]~[11]提出了峭度图的概念,是利用谱峭度作为STFT窗口宽度的函数,从而获取滤波器的最优参数,但这种方法由于处理时间过长,因此不利于被应用到工程实践中去。后来,快速谱峭度图(Fast Kurtogram,FK)的出现,不仅成功地保留了经典峭度图的计算精度,还极大地缩短了谱峭度的计算时间,可以很好地实现设备的实时监测与故障的在线诊断。文献[12]成功地把快速谱峭度图应用到滚动轴承的故障诊断中。
文中针对滚动轴承的振动信号因受到强噪声污染而难以提取故障特征的问题,提出了CEEMDAN辅助快速谱峭度图(Fast Kurtogram)算法,以实现对滚动轴承故障诊断的自适应性,消除对人工经验的依赖。通过实验研究,证明所提出方法的有效性。
1 EEMD与CEEMDAN算法
1.1 EEMD算法
在EEMD算法中,对每一个分解得到的含有随机噪声的IMF进行多次EMD实验,然后计算其均值来抵消噪声的影响,EEMD算法步骤为:
1)令原始信号为x(t),i为实验次数,且把第i次EMD实验中添加的高斯白噪声用vi(t)表示,则第i次信号可表示为


1.2 CEEMDAN算法
根据上述EEMD算法可知,在对信号进行分解的过程中,每次实验中都对包含不同白噪声的含噪信号xi(t)均进行IMF不同分解。每次分解信号得到的余量均不同,即

式中:i为实验次数;k为IMF分量个数为第i次EMD分解所得的第k个IMF分量;为第i次实验的信号余量。
令Ek(·) 为EMD分解得到的第k个分量;令为CEEMDAN分解信号产生的第个分量;ε为噪声标准差;令vi是CEEMDAN分解时添加的高斯白噪声信号;那么以下为CEEMDAN算法的具体步骤:
1)CEEMDAN通过EMD方法对含噪信号x(t)+ε0vi(t)进行I次实验并分解得到第一个模态分量,这与EEMD在分解方法上相同,且第一个模态分量计算表达式为

2)首先计算第一个唯一余量信号r1(t)(即k=1),余量信号为

3)在i次实验中,每次都对信号r1(t)+ε1E1(vi(t))进行分解,并分解到成功获取第一个EMD模态分量停止。然后再求出第二个模态分量,计算如下:

4)以此类推,在计算第k个余量信号时,与步骤(3)的计算过程一致,则有第k+1个模态分量可以表示为:

5)根据步骤4)进行分解,直到分解得到的余量信号不再需要分解为止,分解终止条件为余量信号的极值点个数至多不超过两个。分解结束时,模态分量的总数为K。最终的余量信号可表示为

原始信号x(t)最终分解为

从上述分解过程能够看出,CEEMDAN算法的分解过程是完整的,很好地实现了对信号的精确重构[13]。
1.3 快速谱峭度图(Fast kurtogram)
在高阶谱和频域分析的基础上,发展出了谱峭度算法。它是通过在各个频域内计算每条谱线的峭度值来检测瞬态信号的,并定位其所在的位置[14]。假定Y(t)是信号X(t)的机理响应,表示为

则X(t)的谱峭度定义为

其中:H(t,f)为时变传递函数;S2nY(f)为2n阶谱矩。
为能够将其应用在工程实际中,需要节省谱峭度的计算时间,一般选择塔式快速谱峭度图法 ( Pack-Kurtogram ),这种快速谱峭度图可以利用图上颜色的深浅作为的频率尺度,从而来找到信号的最佳中心频率及带宽,为信号的降噪提供了十分有利的帮助。
1.4 CEEMDAN辅助快速谱峭度图算法的轴承故障诊断方法
在机械设备实际运转中,故障信号往往淹没在噪声中,由于轴承早期的冲击信号比较微弱,给直接识别故障特征增加了难度,所以,提出CEEMDAN辅助快速谱峭度图算法的轴承故障诊断方法,具体算法流程如图1所示。

图1 CEEMDAN辅助快速谱峭度图算法的轴承故障诊断流程图
2 实验分析
2.1 实验装置及数据采集
该实验是建立在Spectra Quest公司设计的GDS齿轮箱故障预测综合模拟试验台,如图2所示。左侧实验电动机为三相异步电动机,满载转速为3450 r/min。右侧为齿轮箱故障预测模拟试验台,加速度传感器安装在齿轮箱箱体外侧各个面上。实验轴承为ER-16K型深沟球轴承,轴承细节参数见表1。实验设备搭载加速度传感器数据采集软件,设置采样频率为2560 Hz,采样点数为20 480,转速为1500 r/min(转频f=25 Hz)。
下面为滚动轴承内圈的故障特征频率计算公式:

式中:Z为滚珠个数;d为滚动体直径;D为球组节圆直径;fs为滚动轴承内圈旋转频率;α为接触角。

图2 齿轮箱故障模拟试验台
该实验中测试轴承所在的齿轮轴与电动机驱动轴为同一轴,由此可知,轴承内圈转频近似于电动机转频(fs=f=25 Hz)。根据表1数据及公式(14)计算出轴承内圈故障特征频率为135.69 Hz,后面通过实验来验证这一结果。

表1 ER-16K轴承部分参数
2.2 分析轴承内圈故障
对采集到的20 480个数据进行分析,分别从轴承故障时域波形、频谱图及其包络图进行分析,如图3所示,从图中频率分布中不能直接找到轴承内圈故障对应的特征频率。
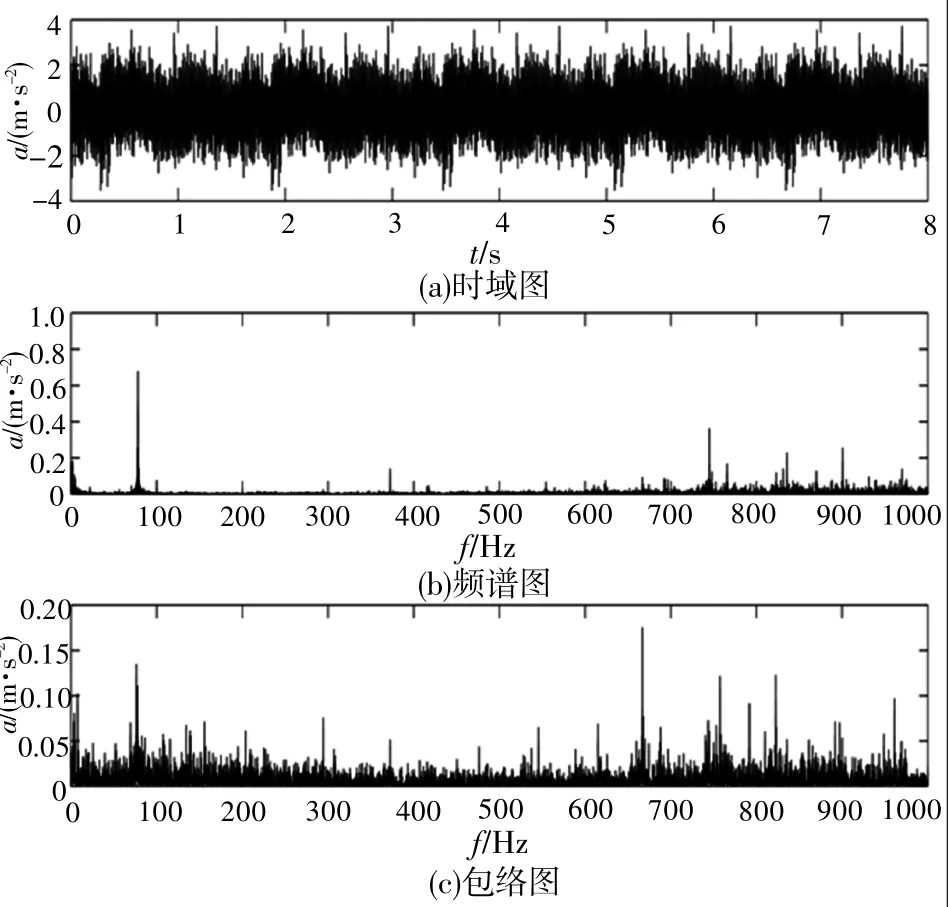
图3 轴承内圈故障信号
为了提取原信号的有用信息进而分析内圈故障,需要消除原信号中的各种噪声和干扰信息。首先对采样数据进行CEEMDAN分解,得到17个IMF分量,结果如图4所示。然后计算每一个IMF对应的峭度值,将计算结果列于表2中。由峭度准则可知,峭度值大于3的IMF分量能够很好地表征出被分解信号含有的冲击频率,所以依次从表2中选出峭度值大于3的分量IMF2、IMF4、IMF7和IMF9,再将这些分量通过叠加来重构新的故障特征信号。对重构信号做时域分析,从图5可以发现,与原始信号相比,信号含有的冲击成分更加明显。

图4 CEEMDAN分解的各个IMF分量
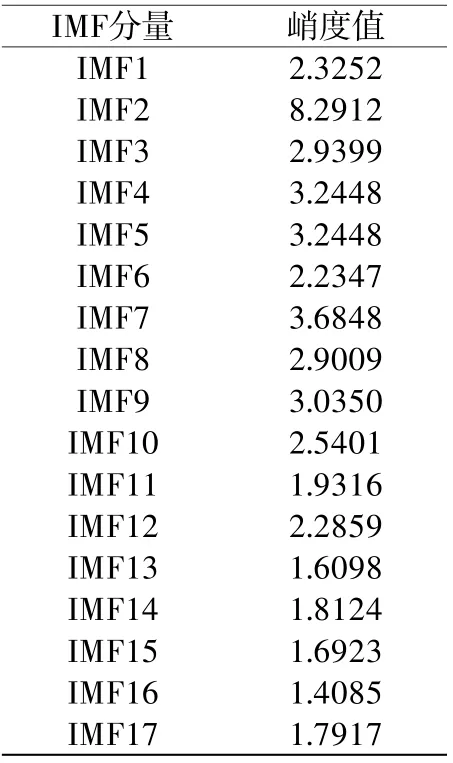
表2 各个IMF分量的峭度值
为了能够显示快速谱峭度图算法在提取特征频率上的优势,先直接对重构信号进行希尔伯特包络解调分析,从图6可以发现,虽然可以观察到轴承内圈故障频率成分137.5 Hz及其二倍频,但仍然存在部分噪声的干扰,提取的效果欠佳。对重构信号做快速谱峭度图分析并与原始信号做比较,对比图7与图8可知,与原始信号的谱峭度相比,CEEMDAN重构信号的最大峭度值为13.4,比原来的8.2提高了很多,同时,原始信号的快速谱峭度图中,故障的频带宽是20 Hz,中心频率是110 Hz,而重构信号的故障频率带宽是40 Hz,中心频率是140 Hz。这证明了CEEMDAN方法可以抑制低频干扰,突出高频共振成分,减少噪声干扰的可行性。
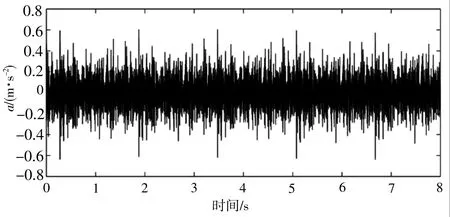
图5 CEEMDAN重构信号

图6 重构信号的包络谱
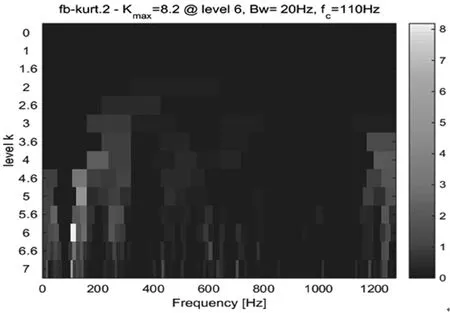
图7 原始信号的快速谱峭度图

图8 重构信号的快速谱峭度图
对重构信号进行快速谱峭度图分析,能够寻找到最优的数字带通滤波器参数,从而对信号进行带通滤波并得到较多有用信息,从图8可以看出,带通滤波器的中心频率为140 Hz,带宽为40 Hz。因此可以确定重构信号在120~160 Hz之间拥有最大的谱峭度,故障对应的冲击成分也最明显。根据得到的重要的滤波器参数来对原始信号进行滤波降噪,效果十分显著。经fir数字带通滤波后的信号如图9(a)所示,从图9(b)重构信号滤波后的包络谱可以清楚地找到故障频率137.5 Hz,以及其2倍频275 Hz、3倍频412.5 Hz和其他倍频。通过文中算法对原始信号降噪后做包络分析得到的故障频率137.5 Hz与根据轴承外圈故障特征频率理论计算公式所得的135.69 Hz十分接近,很容易推断出该轴承内圈出现故障,说明上述方法的有效性。
3 结 论
CEEMDAN是EEMD的完备,在运算速度和自适应性上都有极大的提高。利用CEEMDAN辅助快速谱峭度图算法提取与诊断滚动轴承内圈微弱故障,实验结果显示,该方法对于诊断轴承早期故障具有良好的效果。
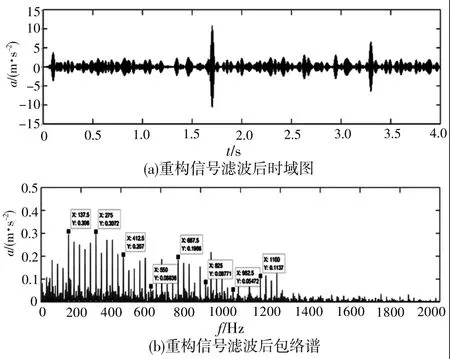
图9 重构信号的滤波图
1)CEEMDAN算法结合峭度准则可以有效地从分解结果中选取敏感分量并进行信号的重构,保留了原始信号中最多的冲击特征,从而大大减少了白噪声的干扰。
2)快速谱峭度图可以很好地计算出带通滤波器的最佳参数,避免经验判断滤波器中心频率和带宽的不足。
3)将CEEMDAN与快速谱峭度图算法相结合,可以精确地提取故障特征信息,与直接将经过CEEMDAN-峭度准则的重构信号进行包络分析做对比,前者具有一定的优越性。
猜你喜欢
航空学报(2022年9期)2022-10-14
哈尔滨轴承(2021年4期)2021-03-08
铁道机车车辆(2020年2期)2020-05-20
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
制造技术与机床(2019年6期)2019-06-25
英美文学研究论丛(2018年1期)2018-08-16
制造技术与机床(2017年4期)2017-06-22
军事交通学院学报(2017年5期)2017-06-05
振动、测试与诊断(2016年1期)2016-04-13