
非入土式洋葱收获机的研发与设计
2020-01-18 06:20左胜甲左胜悦孙琰玥李继成王樱燃
通化师范学院学报 2020年2期
左胜甲,左胜悦,孙琰玥,王 瀚,李继成,王樱燃
洋葱又称玉葱、葱头、圆葱,有很多不同的食用方法,比如炒食、煮食、调味或腌渍,还有降低血压、舒张血管、抑制癌症的保健功效,是一种非常理想和可口的蔬菜[1-2].洋葱的收获是洋葱生产工艺中重要的一环,传统的洋葱收获大多依靠人力来进行洋葱的挖掘、土壤的清除、去秧收集和运输.不仅效率低,耗时多,而且工作量大,工作环境恶劣.这种依靠人力进行收获的方式不仅生产效率低,而且生产成本高,已经越来越不适应农业的快速发展和对洋葱需求逐步增大的趋势[3],而我国的洋葱种植面积是全球第一,产量占全世界的34%[4-5].因此研发制造出适应中国的生产国情,并能大范围推广的洋葱收获机,可以减轻洋葱产业的劳动强度,减轻农民的工作负担,增加农民的工作收入,造福于广大农民.洋葱自动收获机一直都备受国内外农业机械行业的重视,世界各国已经研制出了很多种类的洋葱收获机.技术上比较领先的有美国生产的TopAir洋葱收获机,这种收获机的技术集成度高,体积较大,而且价格较高[6].日本洋马公司生产的HT20洋葱收获机,体型较TopAir 洋葱收获机小,但是不能多行联合收获,效率比较低,而且价格也比较高[7-8].这两种洋葱收获机虽然技术上较为先进,但是在实际应用中并不适合在我国推广使用.
我国对洋葱收获机的研究起步较晚,部分研究院所对洋葱收割机进行了研究探索,但是由于技术尚不成熟,收获质量并不理想,制造成本高.本文设计了一种非入土式洋葱收获机,对其收获原理进行了阐述,并对整机结构进行了设计,分析计算了非入土式洋葱收获机的基本结构参数和整机的工作参数,并对关键部件进行了设计计算,同时构建了整机的三维虚拟样机模型.
1 设计原则
洋葱收获机的研究设计不仅要满足我国的农业生产国情,而且还要遵循一定的机械原理和机械设计的基本准则,以下为其设计原则.
(1)所设计的洋葱收获机应该有一定的通用性,应该尽量适应多种土壤硬度的耕地.
(2)所设计的洋葱收获机应具有合适的挖掘力,防止在收获过程中损伤洋葱.
(3)有合理的结构,防止在收获过程中出现遗漏现象.
(4)在满足洋葱收获机使用强度的情况下,应该使收获机的结构紧凑,重量尽可能小,以节省收获过程中的燃料损失.
2 总体方案的确定
2.1 总体设计思想
洋葱的食用部分是洋葱的块茎部分,其块茎部分有3/4 裸露在土壤之外,1/4 生长在土壤中.其收获过程较之其他根茎类植物较为复杂,其收获工艺过程为:挖掘→去秧→清理土壤→铺条→清选→装运.本设计参考改进已有洋葱收割机的工作过程,采用无入土铲的设计方法,在工作时,整个洋葱收获机在拖拉机动力的带动下向前运动,带动铲板向前推挤洋葱,由于洋葱的块茎只有1/4 埋在土壤下面,所以这个推挤力完全可以将洋葱挖掘出土壤[9],然后洋葱在输送带的带动下,运输到机器行走方向的后方,同时传送带还对洋葱果实有一定的清理作用.
这样设计的好处在于,挖掘铲板不用伸进土壤中,可以减小洋葱收获过程中的挖掘阻力,大大提高了收获效率.
2.2 洋葱收获机的基本结构和工作过程
本研究所设计的洋葱收获机能够高效地完成洋葱果实的收获,是一种半悬挂式机具,其三维虚拟模型如图1 所示,主要部件包括悬挂架、机架、输送链、动力传动系统和螺旋输送装置.
洋葱收获机采用无入土铲的方法,工作效率高.比较合理的洋葱种植的行距为120 mm,株距为80~100 mm,每畦畦宽为1 080 mm,每畦为9行.为了适应这种种植的要求,现设计洋葱收获机的整机宽度为1 240 mm.在工作过程中,洋葱收获机通过悬挂架悬挂在拖拉机的后方,通过拖拉机前进的动力牵引收获机前进,整个机械运转的动力来自拖拉机的变速箱,变速箱的后轴动力经由圆锥齿轮减速器,为输送链提供动力.拖拉机的左右两侧行进在两畦之间的空地上,拖拉机一次行进就可以完成整畦洋葱的收获.位于收获机前端的铲板可以将洋葱果实推挤出土壤,在输送链的带动下,洋葱从收获机的后方漏出,然后依靠人力完成洋葱的收获工作.
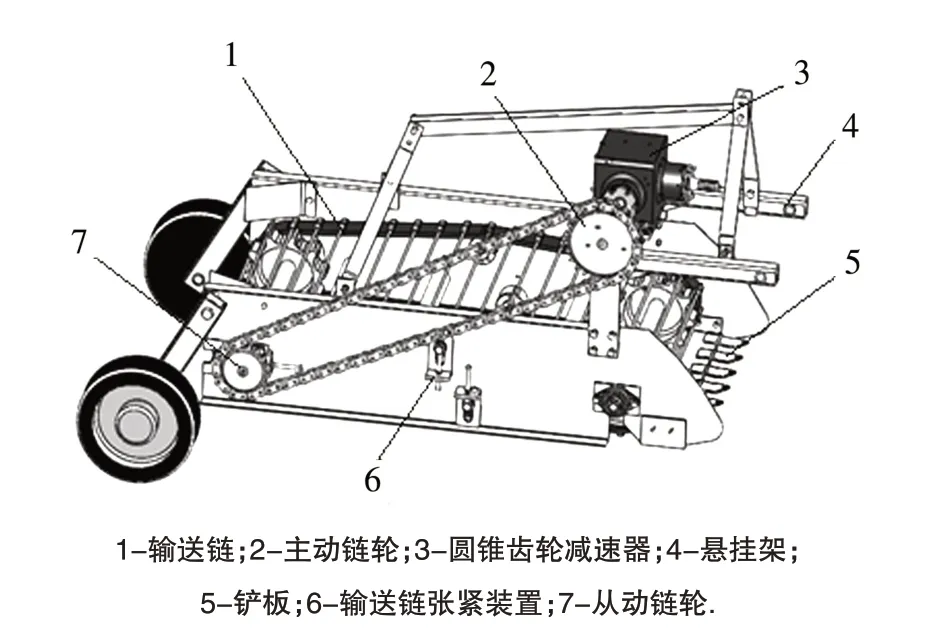
图1 洋葱收获机的基本结构图
2.3 整机工作参数的确定
根据洋葱收获机实际工作中的行进速度、生产效率、工作宽度和设计生产所需的作用力来制定出本设计洋葱收获机的工作参数,洋葱收获机的工作参数不是独立的,而是相互制约、相互联系的.
(1)收获机的外形尺寸.根据最适合洋葱种植的农艺,确定本设计收获机的外型尺寸长×宽×高为2 050 mm×1 434 mm×750 mm.
(2)行进速度.实际工作过程中的洋葱收获机行进地面的平整度、土壤含水量及地面上杂草数量的多少都会影响到洋葱收获机的行进速度.为了洋葱收获机有足够的推挤力且不至于造成能源的浪费,选择35~40 马力的四轮式拖拉机作为本次洋葱收获机计算设计的标准,它的后输出轴转速为540 r/min,这个转速用来为洋葱收获机的传动箱提供动力.带动洋葱收获机的行进速度的范围为:3 km/h ≤v≤5 km/h.
(3)生产效率.本次设计的洋葱收获机的工作宽度是1 240 mm,生产效率T用以下公式计算.

其中,η为收获机田间利用系数,取为0.7,B为幅宽1 m,vm为收获机行进速度,则得T值范围为0.21~0.35 hm2/h.
(4)动力计算.洋葱收获机的前进动力是来自拖拉机前进的牵引力,在收获机前进的过程中需要克服收获机前进的阻力和推挤洋葱块茎完成挖掘的阻力.因此,为了保证收获机的正常运行,拖拉机的功率应该留有一定的余量.如果拖拉机的功率远大于洋葱收获机所消耗的功率,就会造成能量的浪费,不仅增加成本,还有可能对洋葱果实造成损害;但是如果拖拉机功率没有一定的功率余量,就会使拖拉机的发动机长时间地处于过载工作状态,可能导致发动机过热,不能正常工作,甚至有可能造成拖拉机的损坏.所以合理选择洋葱收获机的配套动力是整个设计中的重要环节之一.进行拖拉机功率的配套,也是进行收获机各轴之间传递功率的第一步.由于在传动过程中存在一定的功率损失,同时也为了保证机器的正常运行,所选拖拉机的功率必须大于洋葱收获机多消耗的功率.本设计选取30~40马力拖拉机,其后轴输出转速为540 r/min.现计算洋葱收获机在工作过程中所需要的总功率.
①洋葱收获机的前进功率.在前进过程中需要克服地面与收获机滑板之间的摩擦力,收获机的行走功率为
其中,G为收获机整机重量,包括收获机机械本体的重量和洋葱果实的重量,取为500 kg;vm为收获机行进速度,一般按照最大行进速度来设计[10],取1.39 m/s;f为滑板与土壤之间的滑动系数,取0.15;η为收获机传动效率,为0.95.将数值代入上式得Px值为1.97 kW.
②挖掘功率计算.本设计的洋葱收获机的工作方式不同于其他根茎作物收获机械的工作方式,其他种类的根茎类作物收获机的工作方式是将铲板切入土壤之中,将果实翻掘出来,由于破土和翻土的过程会对收获机械的前进造成比较大的阻力,因此需要比较大的功率.由于洋葱果实特殊的生长方式,本设计的洋葱收获机,其挖掘方式是利用铲板前进产生的推挤力将洋葱果实挖掘出来,然后在拨果轮的带动下先进入收获机内完成后续的收获工序.所以本设计的洋葱收获机在挖掘过程中消耗的功率会大大减少,其挖掘力为

式中,μ为铲板与土壤之间的摩擦系数,一般取0.4~0.9,本次设计取为0.4;N为洋葱收获机与洋葱果实的总重量,Np为土壤的黏着力为1 000 Pa,s为黏着面积,将数值代入上式得

理论挖掘功率为

实际挖掘功率为

其中,η为传动效率,为0.96.则设计功率为

kA为工况系数,取1.4.
综上所述,本设计洋葱收获机的最大消耗功率为

3 关键部件设计
3.1 链传动的设计计算
在本设计的洋葱收获机中,链传动的作用是为洋葱果实的输送链提供动力.链传动是通过链条将具有特殊齿形的主动链轮的运动和动力传递到具有特殊齿形的从动链轮的一种传动方式.链传动有许多优点,与带传动相比,无弹性滑动和打滑现象,平均传动比较准确,工作可靠,效率高;传递功率大,过载能力强,相同工况下的传动尺寸小;所需张紧力小,作用于轴上的压力小;能在高温、潮湿、多尘、有污染等恶劣环境中工作.链传动也有一定的缺点,仅能用于两平行轴间的传动,成本高,易磨损,易伸长,传动平稳性差,运转时会产生附加动载荷、振动、冲击和噪声,不宜用于急速反向的传动中.由于本设计是设计一台农用机械,工作环境恶劣,而且要求传动力比较大,对传动平稳性的要求并不高,因此选用链传动.设计计算如下.
(1)选择链轮齿数z1、z2.根据传动比,假设链速vL=3~8 m/s,选定小链轮齿数z1=18,大链轮齿数z2=25.
(2)确定计算功率Pca.根据洋葱收获机的实际工作情况,选取工况系数KA=l.4,则Pca值为2.1 kW.
(3)确定链条链数Lp.初设中心距a0=40p,
p为链条节距,则

取Lp=102.
(4)计算额定功率.查齿数系数Kz=0.94,长度系数Kl=1.005,多列数系数Km=1,那么所需传递的额定功率为
(5)确定链条节距.根据额定功率和小链轮转速(n1=1 455 rpm),选定链号为08A,单排链,链条节距p=12.70 mm.
3.2 铲板的设计
本次设计的洋葱收获机采用的挖掘方式是非入土式的,挖掘洋葱时并不需要将铲板切入土壤之中,只需要将铲板在拖拉机动力的带动下从土壤上方划过就可以将洋葱果实从土壤中推挤出来,完成洋葱收获机的挖掘作业.采用这种挖掘方式,所需要的挖掘力较小,减少拖拉机所消耗的功率,提高洋葱果实的收获效率.挖掘部分的结构示意图如图2所示.
从图中可以看出,整个挖掘部分是有多个铲板和一个连接架组成的,多个铲板通过焊接的方式与连接架相连,连接架通过两侧的螺栓孔与整个洋葱收获机的机架部分连接在一起.
为了防止铲板部分在挖掘过程中对洋葱果实造成伤害,在设计铲板的过程中,将铲板的前端设计成弯曲的,铲板的钣金设计骨架如图2所示.
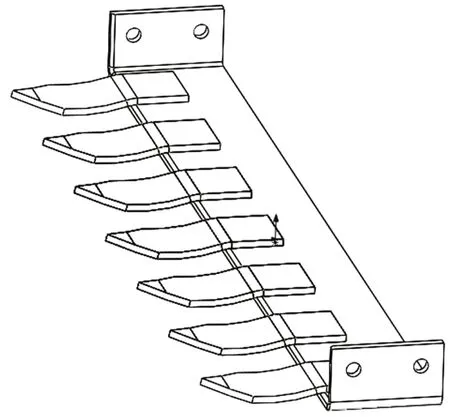
图2 挖掘部分的结构示意图
4 结论
(1)传统入土式洋葱收获机存在着挖掘阻力大、能耗高、收获工艺集成度低等缺陷,本次所设计的洋葱收获机采用无入土的挖掘方法,在挖掘的同时还能一次性完成清理、去秧和分类收集工作.不仅大大提高了洋葱收获过程的效率,节省了大量劳动力,而且提高了洋葱收获的质量,减少了洋葱收获中的漏果和伤果现象.
(2)该机设计整机尺寸为:2 050×1 434×750 mm,生产效率为0.21~0.35 hm2/h,最大消耗功率为9.29 kW,具有高效、轻便、低能耗的特点.
(3)该机采用后半悬挂式悬挂在拖拉机后面,通过拖拉机后轴为整个机器提供动力,具有较好的通用性和适应性.
综上所述,本次设计的洋葱收获机的整体方案选择合理,结构简单,易于生产制造及后续的维护保养工作,具有较强的市场推广性和实用性.
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
汽车实用技术(2022年14期)2022-07-30
农机使用与维修(2022年2期)2022-02-21
中国农村科技(2021年12期)2021-12-28
动漫星空(兴趣百科)(2020年9期)2020-09-28
物流技术与应用(2020年4期)2020-05-06
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河北农机(2020年2期)2020-01-08
小猕猴智力画刊(2017年9期)2017-10-19
汽车实用技术(2015年8期)2015-12-26
