
基于微波射频技术的三维智能雷达倒车系统设计
2020-01-18 06:19刘皖苏
通化师范学院学报 2020年2期
刘皖苏,卢 彪
随着经济的发展,越来越多的家庭将汽车作为出行工具.但是,由于视觉盲区的存在,汽车驾驶员在倒车过程中引发的交通安全事故越来越受到人们的重视.目前市场上,二维倒车系统主要采用声音和图像告知驾驶员车辆后方障碍物的情况,进而提高倒车安全性.然而,二维倒车系统无法精确掌握汽车后方不确定性路况,容易引发交通事故[1].
本文针对传统二维倒车影像系统的缺陷,设计了基于微波射频距离检测技术的智能三维倒车雷达系统[2].该系统除了具备传统倒车系统的影像和语音功能之外,还加入了汽车智能辨识后方路况凸起、凹陷、悬崖,以及驾驶员盲区内的其他障碍物等复杂路况的检测,并提供智能语音警示功能提醒驾驶员谨慎驾驶.
1 系统总体框架设计
微波射频雷达倒车系统主要由STC89C52单片机、微波射频距离检测模块、微波射频路面检测模块、稳压电源模块、声波传送温度补偿模块、智能语音警告模块及液晶显示电路等组成,微波射频雷达系统的总体设计如图1所示[3].
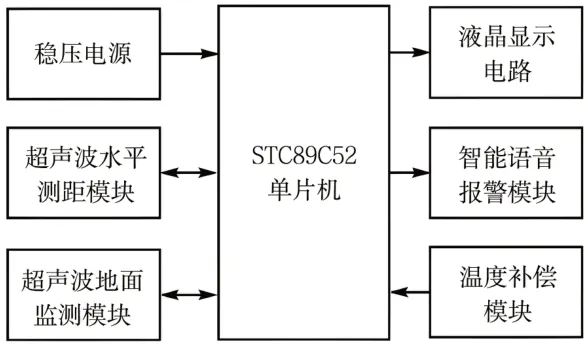
图1 系统总体设计原理框图
微波射频雷达系统工作原理为[4]:当汽车启动倒车程序时,微波射频距离检测模块从汽车底部向水平逆向方向发射微波射频,微波射频路面识别模块从汽车底部方向发射微波射频(安装方位与地平面成45°角).微波射频在发射途中遇到阻碍物会产生反射波,反射波分别被距离判定模块和路面检测模块接收.
反射波经过信号放大、频率过滤和电压补偿之后,STC89C52 通过反射波的到达时刻计算出反射波的回送时间,从而计算出汽车尾部与阻碍物质之间的距离.避障距离通过液晶显示器实时显示,并通过语音警示模块实时发出语音提醒.由于微波传输速度与室外温度系数相关,温度补偿模块的温度传感器提高了系统精度.
2 硬件系统设计
2.1 微波射频水平距离测定模块设计
微波射频距离测定模块采用南京中伟公司的收发一体MTK068,该模块主要包括了微波发射节点、微波接收节点和射频控制电路,信号发射频率为60 Hz,发射角度为0°到60°,探测距离为±45°的弧状检测区域,检测范围为2 cm 到300 cm[5].微波射频距离检测模块工作图如图2所示.
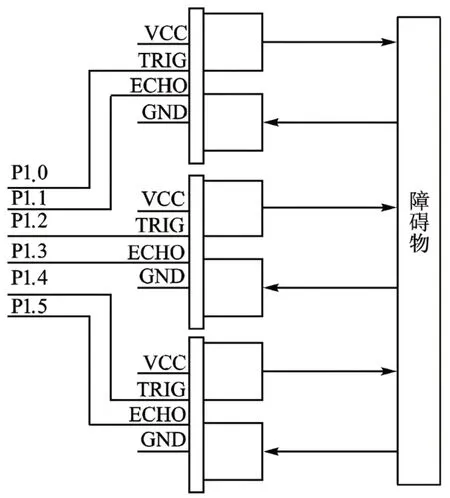
图2 微波射频水平测距模块示意图
微波射频水平测距时,4 个微波射频模块以等比数差排列,微波射频芯片的TRIG 和ECHO与STC89C52的I/O对接完成发射与接收的功能.当STC89C52提供20 μs的低电平给ECHO接口,微波射频测距模块利用发射节点产生16 个80 kHz的周期性电平来实现微波射频的发射.接收探头检测到回波后,TRIG 引脚输出一个与超声波从发射到接收所用时间T 相同的高电平,高电平时间T 通过单片机内部定时器O加以采集.
当单片机采用12 MHz 的外部晶振时,每执行一个机器周期则需要1 μs,计数加1需要一个机器周期,所以通过定时器计算得到的时间T(单位是s)为

其中,T 为微波射频从发射到接收的往返时间,THo 与TLo 表示定时器O 的高字节(High)和低字节(Low)寄存器的字节值.测距模块与障碍物间的距离L 为
其中,v 表示微波传输速度.
2.2 微波射频地面监测模块设计
微波射频发送的声波是直线传播,当微波遇到不同的障碍物时会产生不同的反射和折射,当声波向斜度面发射时,反射回波可能回不到接收模块[6].极限反射如图3所示.
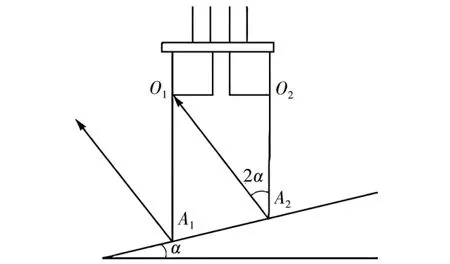
图3 极限反射示意图
在极限情况下,M 设为探头测量障碍距离,地面斜面的倾斜角度为α,避障距离M 与斜面反射角α 的计算关系为

其中,O1和O2是汽车尾部双探头的固定位置,A1、A2 是发射微波斜面反射节点.
当倾斜角α 为45°、O1与O2之间的距离为40 mm 时,接收模块只能在测量距离M 的值小于34.86 mm 的条件下接收到信号值,而实际测量距离远远大于此值.因此,在计算M 的值的情况下,散射回波的强度表示为
其中,Is为散射回波强度;Wo为微波探头发射功率;v 为轴向集中系数,其与辐射面的形状有关;M 为探头到斜面的垂直距离;Δθ 为波束角;β 为入射波倾角.
由式(4)得知,在微波射频功率、转向轴系数和发射角不变的情况下,散射强度与检测路径、倾斜角密切相关,在倾斜角β=30°与β=90°的情况下,散射回波对系统的精度无任何影响,只需将微波射频模块MTK068固定在汽车底部,并与地面成30°夹角.
2.3 温度补偿模块设计
温度补偿模块传感器采用三星公司的TD1B26 芯片,该芯片具备体积小、精度高等特点,通过STC89C52芯片的I/O直接对接实现双向信号互通,测试范围为-60 ℃~180 ℃,测量精度可达±0.6 ℃[7].
微波射频在传播途中是以纵波模式传送,其速度很容易受到空气的温度、湿度和气体成分的干扰,其中温度占比重最大.微波射频的传速与温度的占比关系为

其中V 为微波射频的速度,T 为摄氏温度.
2.4 自动语音报警模块设计
为了实现自动语音提醒功能,设计了智能语音警报模块[8].该模块采用科大讯飞的MU886智能语音芯片,工作电压为3~4.5 V,嵌入32位D/A语音输出和自动音频滤波并直接驱动6 Ω/0.8 W的蜂鸣器.该芯片通过按键控制、单线串口和多线串口互联等工作模式,实现了高音量和高音质的输出.该芯片通过D/A接口直接对接STC89C52的I/O接口,通过命令行实现语音的各类功能.
3 系统软件流程设计
当系统上电汽车挂倒挡的时候,首先进行初始化各个模块:包括单片机系统、温度传感器、液晶屏和微波测距等,具体包括工作模式的初始化、数字显示初始化等.然后,通过温度传感器采集空气温度,并利用温度补偿算法实现声速的系统补偿和系统校正.当微波射频通过发射节点测量得到汽车底部与阻碍物之间的水平距离后,首先进行安全距离的判定.如果安全距离符合系统设定,汽车倒车继续进行.一旦系统的距离进入警示距离系统立刻进入智能语音警示状态,随时提醒驾驶员立刻停车.微波射频雷达倒车系统软件流程如图4所示.

图4 系统软件设计流程图
当微波射频检测到地面与汽车底部成倾斜角30°或者以上时,系统立刻判断距离是否急变.若测距急变,微波射频雷达倒车系统立刻执行停止水平距离提示语音,并执行播报地面距离提示语音告知驾驶员后方障碍物出现凹陷或凸起的复杂路况.如果水平测距未发生急变,则仍旧执行倒车水平测距模式.
4 系统测试
为了验证微波射频雷达智能倒车系统的性能,进行了系统性能测试.测试内容包括了水平距离测试和路况检测测试.水平距离测试的实验数据如表1 所示,卷尺测量距离为实际值,测量值为LCD液晶显示值.
由表1 可知,微波射频雷达倒车系统可在2~300 cm 实现水平距离准确测量测距,其中在距离300 cm处测试的最大误差为1.21%,而2~6 cm区间的误差率为0%,满足了智能雷达倒车系统的需求.同时,经过多次测试,微波射频雷达倒车系统可及时检测出系统定义的8 cm以上的路面凸起及路面凹坑,并给出相应提示语音警报.该系统可根据汽车的类型,实现系统测量数值的微调.

表1 微波射频雷达倒车系统水平精确度测试
5 结语
本文设计了基于微波射频技术的智能三维倒车雷达系统,该系统的总体框架主要包括了稳压模块、微波射频水平测距模块、地面测距模块、温度补偿模块和智能语音警报模块.水平测距模块和地面测距模块实现了汽车尾部与障碍物的复杂情况识别,温度补偿模块提高了系统识别精度,智能语音警告实现了实时数据采集的警示.该系统经过测试,完全满足三维雷达倒车系统的需求,具备一定的应用价值和推广价值.
猜你喜欢
导航定位学报(2022年4期)2022-08-15
汽车工程师(2021年12期)2022-01-17
军民两用技术与产品(2021年12期)2021-03-09
科学(2020年3期)2020-01-06
电子制作(2018年10期)2018-08-04
红领巾·探索(2018年12期)2018-01-26
电子制作(2017年13期)2017-12-15
电子制作(2017年7期)2017-06-05
电子制作(2016年1期)2016-11-07
腹腔镜外科杂志(2016年9期)2016-06-01
