
共直流母线五相双逆变器共模电压抑制策略
2020-01-16 10:19杨旭,陆可
微特电机 2020年1期
杨 旭,陆 可
(西南交通大学 电气工程学院,成都 610031)
0 引 言
双逆变器驱动系统是在单逆变器驱动传统电机控制系统基础上,不改变原电机的本体电磁设计,只是将绕组中性点打开,并在绕组另一端串接逆变器而成,这样的结构具有更高的容错能力和电压利用率,在电磁弹射、轮船推进、以及电动汽车上都有广泛的应用[1]。近20年来,三相开绕组双逆变器系统已经有了深入的研究[2-7],开绕组系统所呈现的性能优势和应用潜力正在越来越被学术界关注。近几年,也有学者对多相开绕组结构展开了研究[8-10]。目前,多相驱动一般是传统两电平逆变器或者中点钳位的三电平逆变器,而针对多相电机的双逆变器驱动结构研究还较少,和三相系统相比,多相驱动系统具有更高的容错能力、更高的母线电压利用率,应用场合更加广泛。
五相双逆变器系统的拓扑结构具有多样性,按照电源的供电方式划分,可分为单电源供电和双独立电源供电两种结构,即共直流母线和独立直流母线,如图1所示。独立直流母线拓扑需要用到两个隔离电源,这样会增加系统成本,同时也会增加系统结构的复杂度,在某些不能提供双电源的场合,独立直流母线结构将不能使用。共直流母线拓扑使用单电源供电,减少了系统的复杂度,同时节约了成本。然而,对于共直流母线结构,电机绕组和母线之间将形成零序电流回路,当系统产生共模电压时,将会形成零序电流,零序电流流过电机绕组会增加系统的损耗,降低系统运行效率和运行稳定性。

(a) 共直流母线

(b) 独立直流母线图1 五相开绕组系统结构
为了抑制或消除零序电流,传统方法是在定子回路增加滤波器[11],但这样会使硬件电路更加复杂,增加了成本。事实上,空间脉宽调制是产生共模电压的主要原因,只要抑制了系统的共模电压,零序电流也将得到较好的抑制,因此更好的方式是优化调制策略,抑制共模电压,以抑制零序电流。但和三相系统不一样的是,多相系统脉宽调制由于矢量的增多,调制算法将显得更加复杂。在三相开绕组系统中已提出多种脉宽调制方法以消除共模电压,文献[2]利用电压补偿器的思想来抑制共模电压,此种方法会用到低通滤波器和锁相环,控制系统结构显得复杂;文献[3]提出了基于正态分布和矢量解耦的原理抑制共模电压;文献[4-6]利用双逆变器交替钳位的思想,通过零电压矢量作用时间的重新分配,实现零序共模电压的抑制,但这种调制方式仍会存在瞬时共模电压;文献[7]用不产生共模电压的矢量作为合成矢量,因此,理论上在每个时刻系统产生的共模电压将为零,在后来多相开绕组系统中也运用了此思想,以消除共模电压[12]。
目前,对双逆变器系统共模电压抑制的研究主要集中在三相系统,对五相系统的研究较少。文献[13]把每个扇区分为4个小扇区,每9°一个小扇区,按照开关切换次数最少的原则,在每一个小扇区采用一种开关矢量作用于INV1和INV2,这种方式能减少输出谐波,但却增加了开关频率,增大了损耗;文献[14]应用交替钳位的思想,把INV1和INV2交替作为钳位逆变器和调制逆变器,使一个周期内输出的平均共模电压为零,这种方式可以降低功率管的使用频率,减小系统损耗,但这种方式仍会存在瞬时共模电压。
本文采用文献[7]提出的理论,选择不产生共模电压的矢量来合成参考矢量,相较于文献[7]中针对三相系统解耦角度为120°,本文针对五相系统解耦角度为144°。和三相系统共模电压抑制相比,五相系统共模电压抑制更加复杂,主要体现在输出的空间矢量增多,空间矢量需分解到基波空间和三次谐波空间,这都会增加调制的难度,本文对解耦后单个五逆变器采用最近四矢量空间脉宽矢量调制,以此实现对五相双逆变器系统共模电压的抑制,最后通过仿真验证了本方法的正确性。
1 五相开绕组双逆变器系统
共直流母线五相开绕组电机双逆变器拓扑如图1(a)所示。双逆变器系统由10个桥臂(a,b,c,d,e,a′,b′,c′,d′和e′)和20个功率管构成,aa′,bb′,cc′,dd′和ee′为五相开绕组电机各相绕组,五相绕组两端分别接逆变器1(INV1)和逆变器2(INV2),直流电压源同时给INV1和INV2供电,开绕组五相电机输出相电压由INV1和INV2共同调制,输出的相电压可表示:
(1)
双逆变器系统分别在两个正交子空间d1-q1,d3-q3产生的空间矢量:
(2)
(3)

对于单个五相逆变器,产生的空间矢量(00000~11111)一共有32种,则双逆变器系统一共可产生32×32=1 024种空间矢量,如此多矢量将会增大调制难度,本文介绍的调制方法将大大减少选择的空间矢量数量,减小调制难度。
2 共模电压分析
式(4)为INV1,INV2产生的共模电压,式(5)为双逆变器系统产生的共模电压,若要使双逆变器系统输出共模电压为零,则需满足式(6):
(4)
(5)
(6)

(7)
按照以上矢量产生规则,五相双逆变器系统中输出不产生共模电压的空间矢量如图2所示,矢量位置分布为5个十边形D1~D5和零矢量D0,一共6种不同的幅值,当只用这十边形上的矢量作为合成矢量时,双逆变器输出的共模电压即为零。
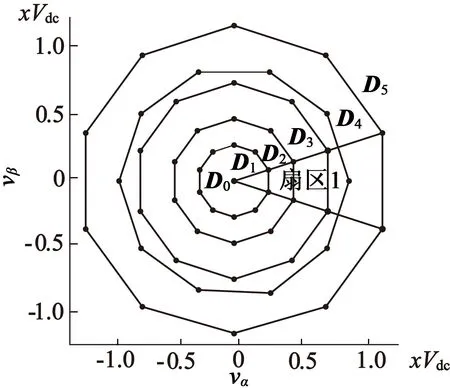
图2 输出VCM为零的电压矢量图
将扇区1内D0~D5矢量开关状态列出,如表1所示,进一步说明开关状态和空间矢量位置的关系。
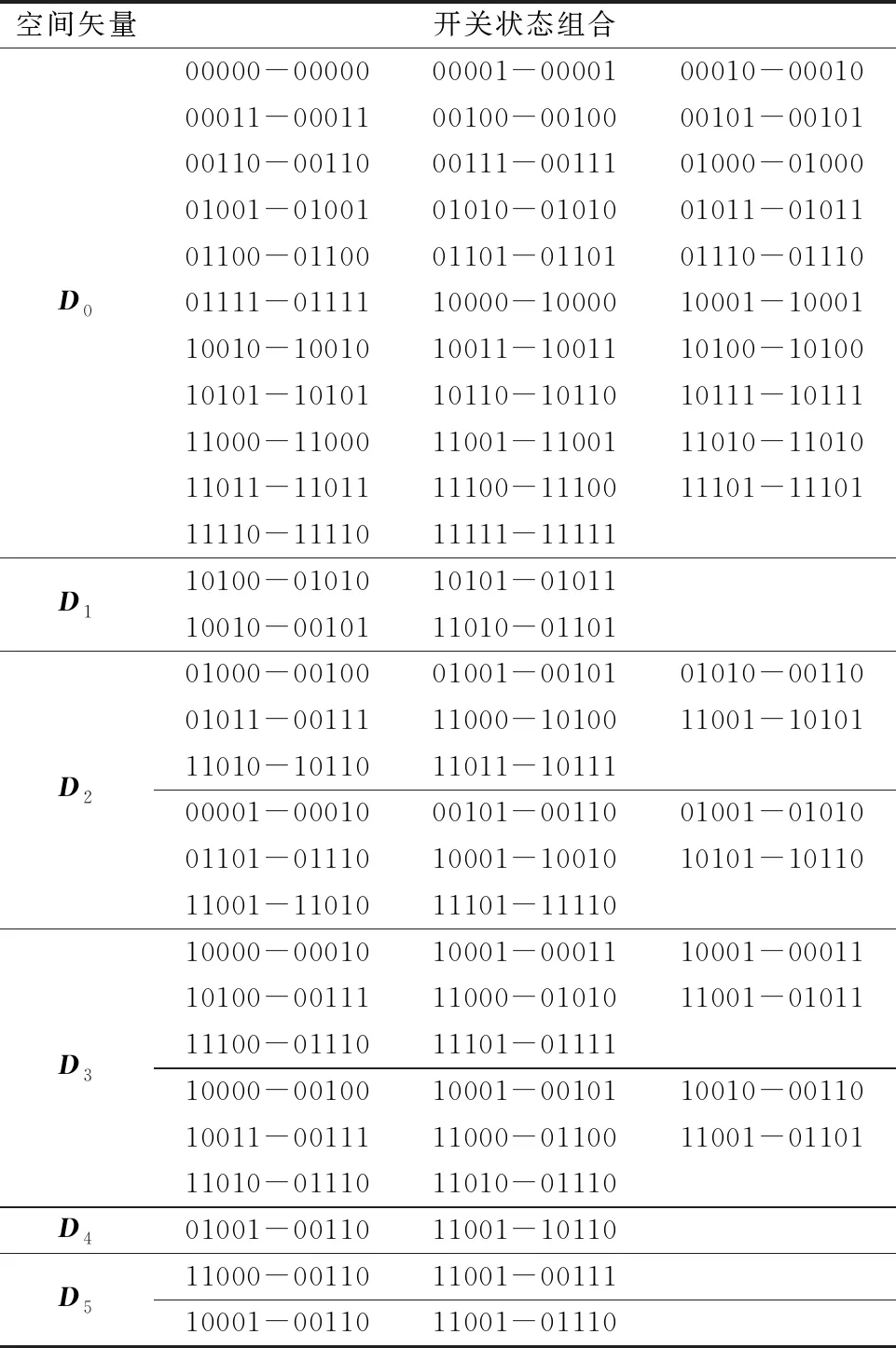
表1 输出VCM为零的开关组合状态
3 共模电压抑制策略
为了保证在d3-q3空间合成矢量幅值为零,并且调制度尽可能得大,选D3,D5作为合成矢量。每一个矢量位置都是由几种不同的开关组合而成,但在满足开关切换次数最少的情况下,一共可有两种空间矢量位置组合顺序,如图3所示。

图3 两种空间矢量位置组合顺序

在选择空间矢量时,零矢量D0有32种(图3矢量位置O),D3每个空间矢量位置有8种(图3矢量位置A,B),D5每个空间矢量位置有2种(图3矢量位置C,D),因此对于同一个矢量位置合理选择开关状态就非常重要。以双逆变器系统输出空间矢量在扇区1为例,按照表1给出的每个空间位置可以选择的开关矢量。其中D3,D5表格上部分对应矢量位置A,C;D3,D5表格下部分对应矢量位置B,D。在选择开关切换状态时,还需满足开关切换次数应为最小,则INV1和INV2可按表2的切换顺序进行开关状态切换,即图3实线顺序(O-A-D-C-B),若按虚线顺序也是一样的原理,本文按实线轨迹为例。

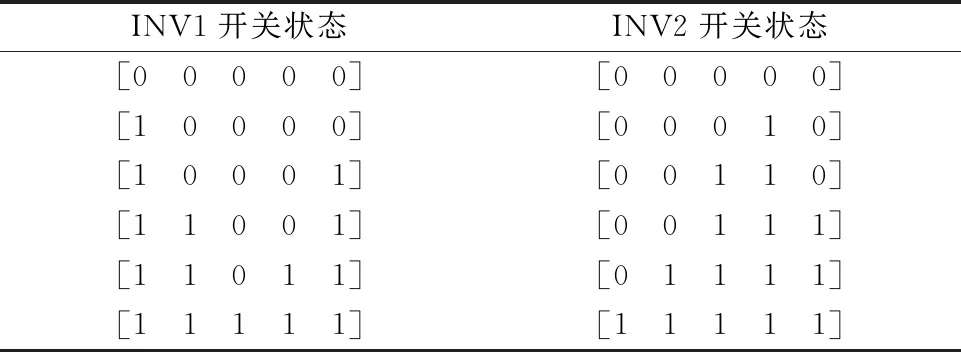
表2 INV1,INV2开关切换顺序

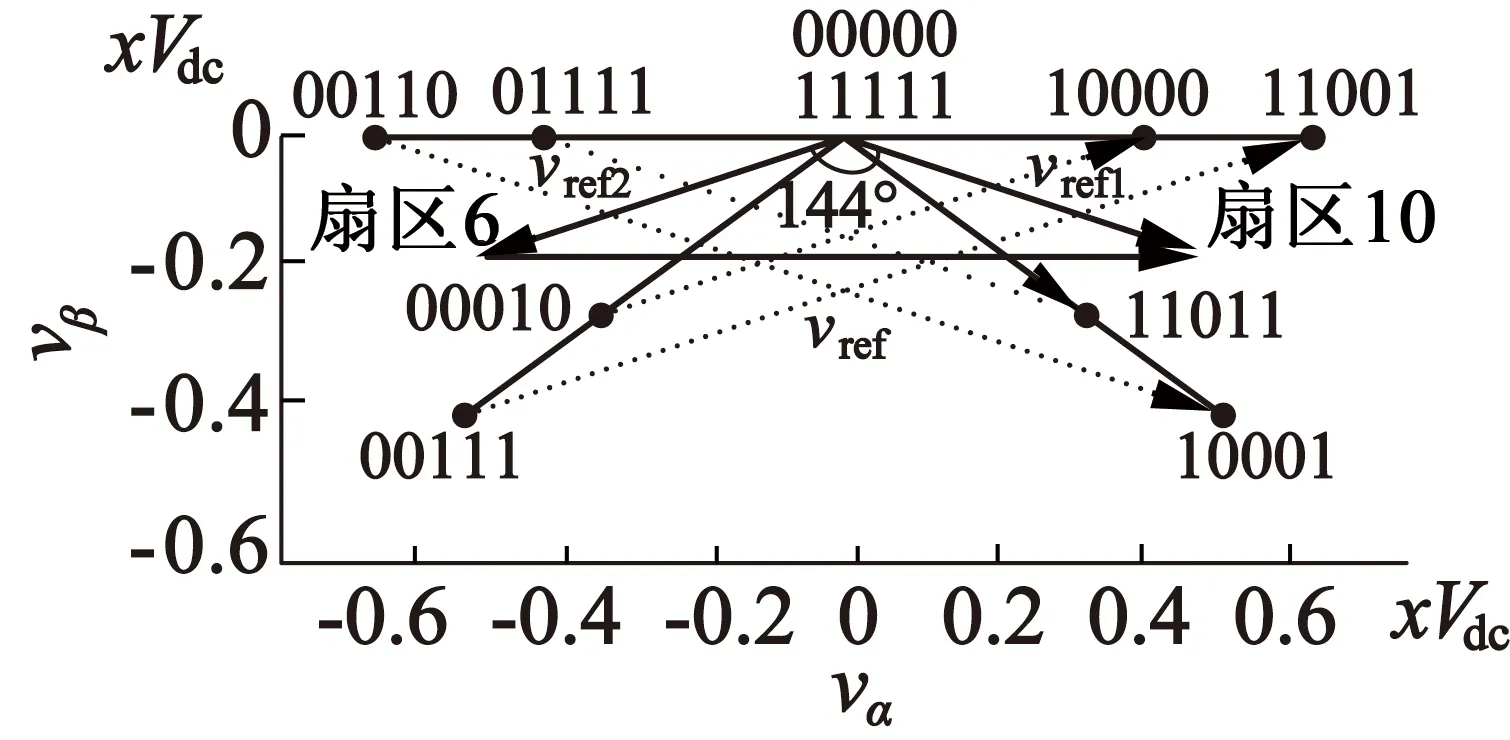
图4 144°空间矢量解耦原理图
(8)
经过解耦之后,五相开绕组电机双逆变器系统的控制可转化为2个五相逆变器的控制。由于在单个逆变器中只用中矢量和大矢量作为合成矢量,这样能够保证在d3-q3空间矢量幅值为零[15],以此消除谐波,这种调制方式称作最近四矢量空间矢量脉宽调制。
4 最近四矢量空间矢量脉宽调制
图5为五相逆变器第1扇区离参考矢量最近的相邻四矢量,图5(a)为d1-q1空间矢量,图5(b)为d3-q3空间矢量。
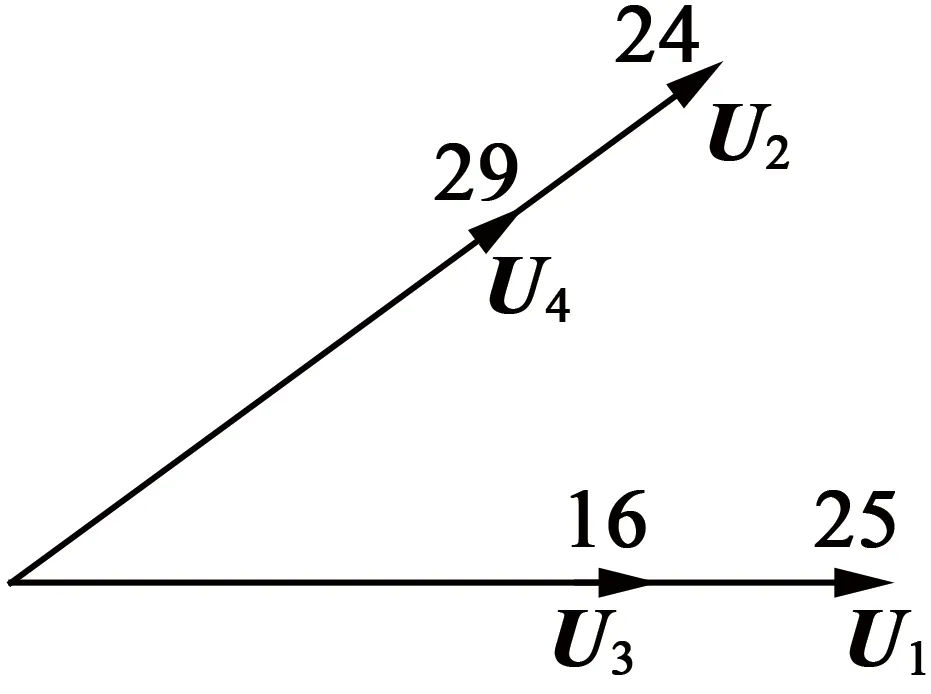
(a) d1-q1空间矢量

(b) d3-q3空间矢量图5 第1扇区相邻四矢量
d1-q1空间两个大矢量分别为U1,U2幅值为0.647 2Vdc,在d3-q3空间对应幅值为0.247 2Vdc,d1-q1空间两个中矢量为U3,U4,幅值为0.4Vdc,在d3-q3空间对应幅值为0.4Vdc,它们的作用时间分别为T1~T4,要使在三次谐波空间合成矢量幅值为零,需满足下式:
(9)
可求出:
(10)
基本矢量U1,U2,U3,U4作用时间应满足下式:
(11)
联立式(10)即可完成相邻四矢量空间四矢量脉宽调制的基本电压矢量作用时间的计算。
5 仿真验证
为了验证本文的调制算法对五相双逆变器系统共模电压抑制的效果,搭建了五相开绕组永磁电机的MATLAB开环仿真模型,采用恒压频比(V/F) 的控制方式控制电机运行,如图6所示。仿真参数如下:直流电压源400 V,载波频率10 kHz,定子电阻6.8 Ω,d,q轴电感为7.5 mH,漏感1.5 mH,极对数为2,永磁体磁链为0.5 Wb。
当vref1和vref2成144°解耦时,SVPWM产生的调制波如图7所示,其中Tga为INV1a相桥臂调制波,Tga′为INV2a′相桥臂调制波。
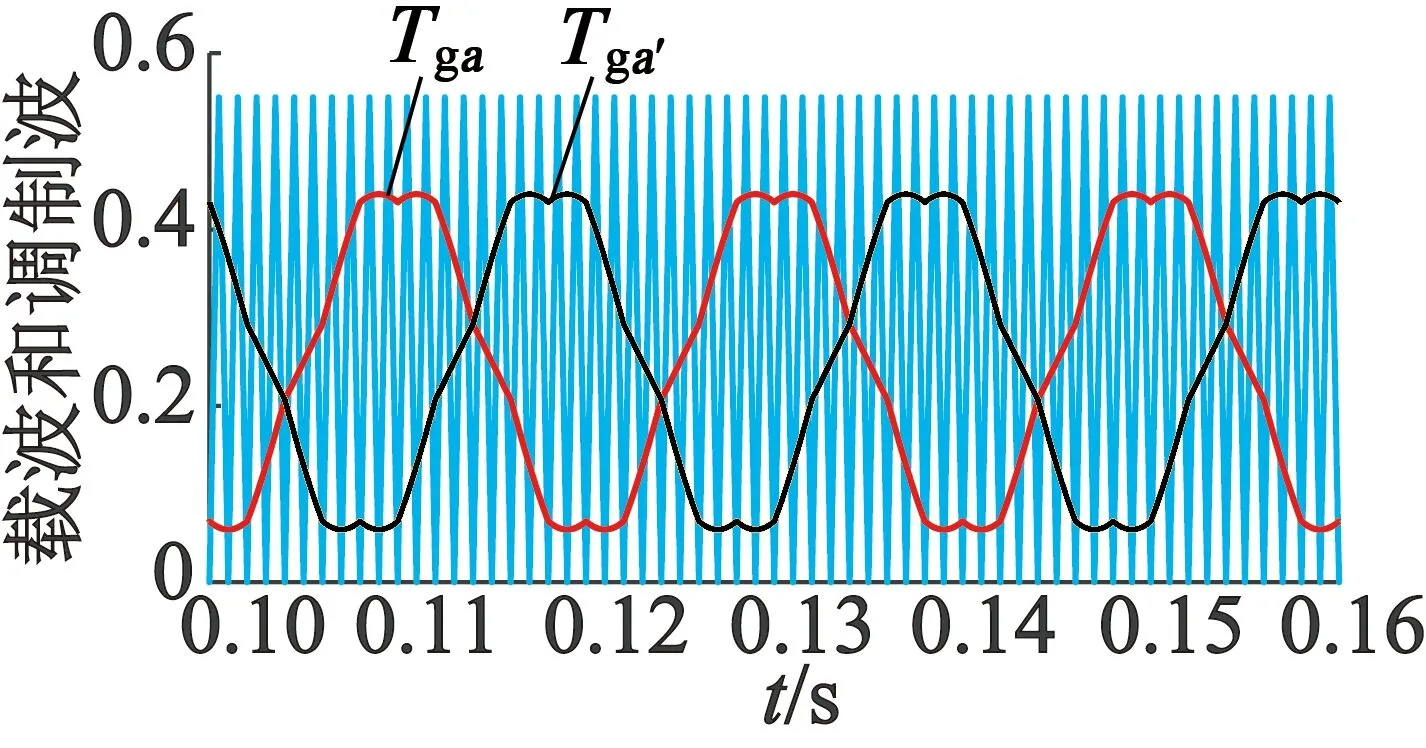
图7 INV1和INV2调制波波形
图8、图9分别为双逆变器系统A相相电压波形Vaa′和AB两相间线电压波形Vaa′-bb′。

图8 相电压仿真波形Vaa′
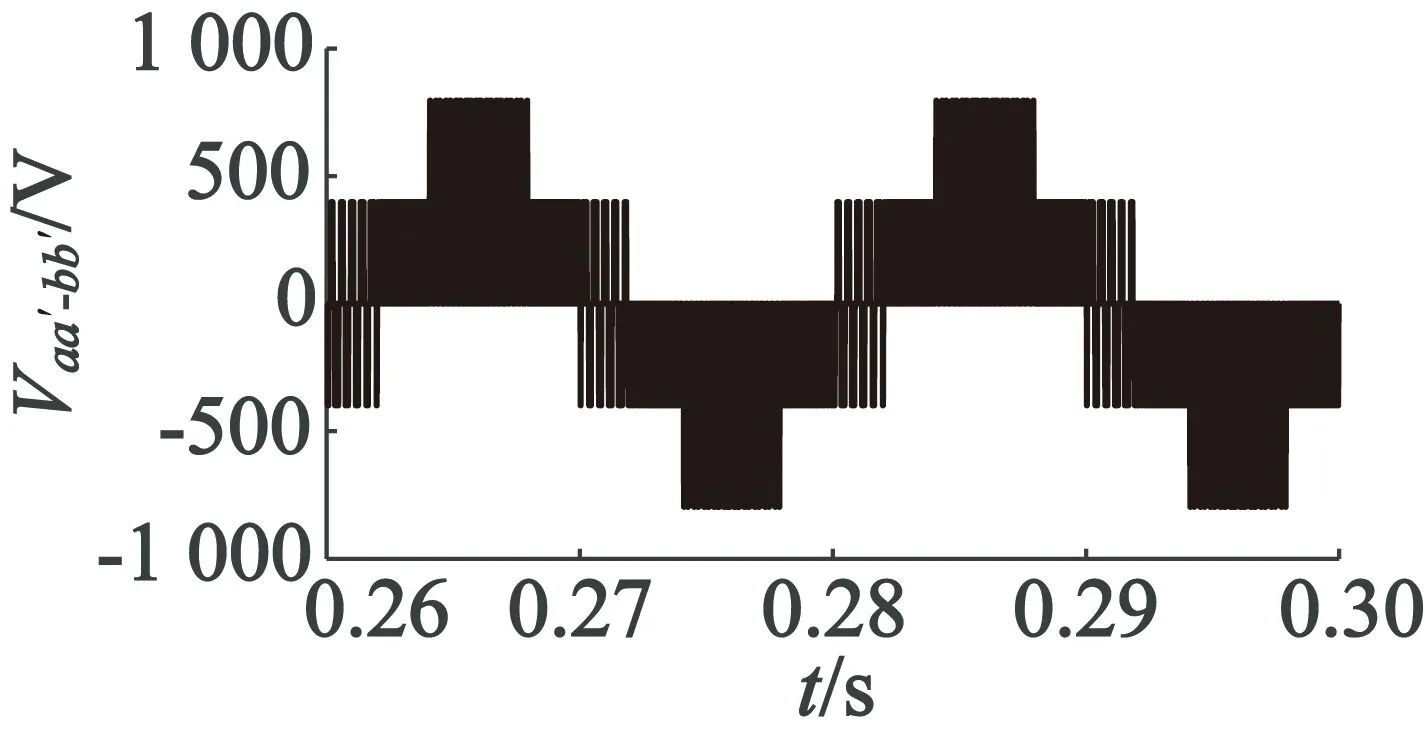
图9 线电压仿真波形Vaa′-bb′
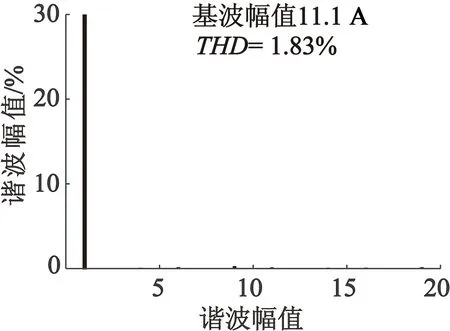
为了证明本文对双逆变器系统输出共模电压抑制的效果,将144°解耦调制和非144°(本文任取60°)解耦调制进行对比分析,输出共模电压调制度分别为0.5和0.9。图10为调制度m=m1=m2=0.9时,144°解耦调制和60°解耦调制输出的共模电压波形。图11为144°解耦调制和60°解耦调制输出的电流波形及对应谐波频谱。图12为在调制度m=m1=m2=0.5时,144°解耦调制和60°解耦调制输出的共模电压波形。图13为144°解耦调制和60°解耦调制输出的电流波形及对应谐波频谱。
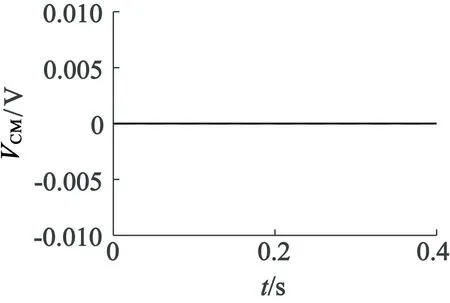
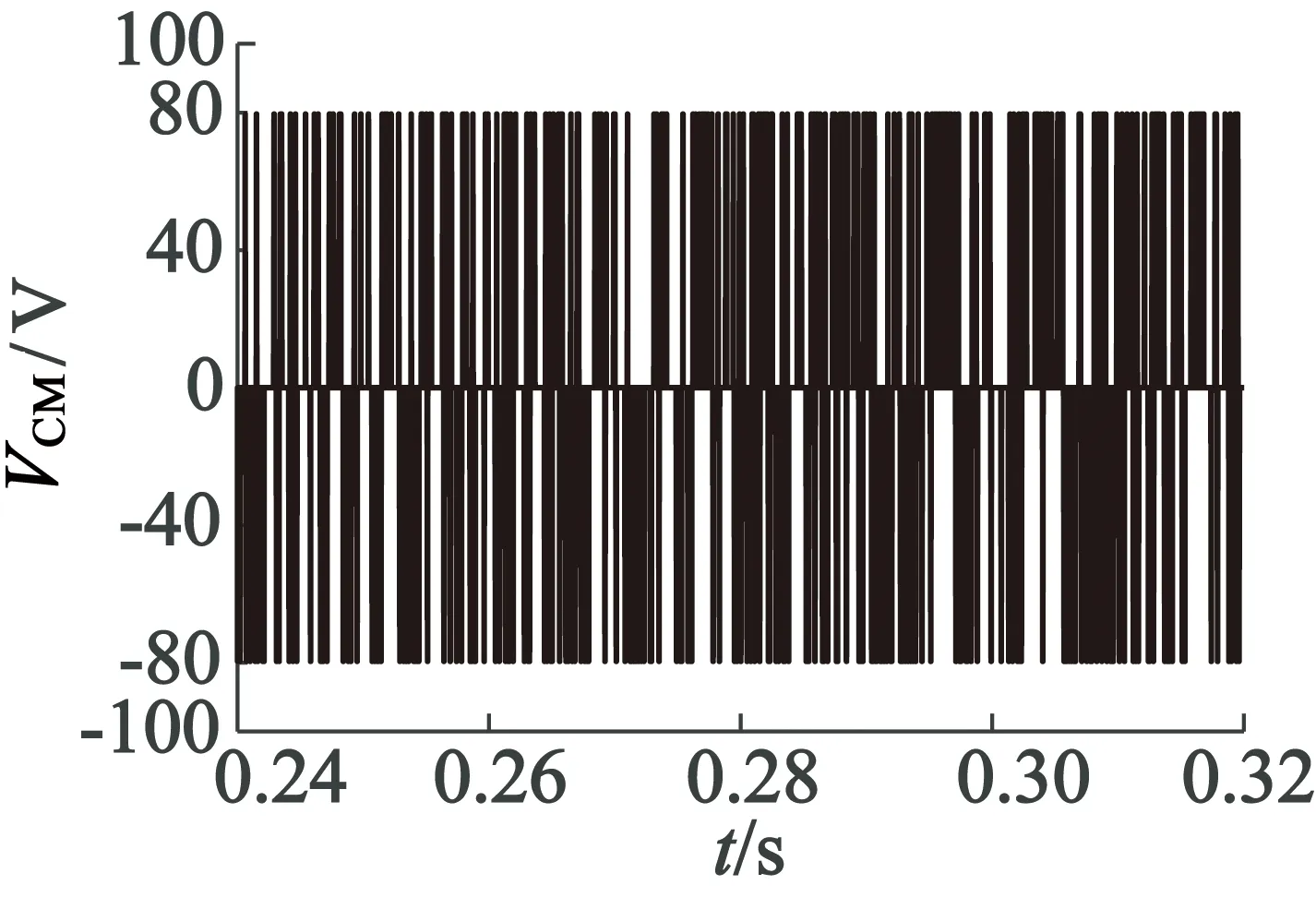
图10 m=0.9时输出共模电压仿真波形
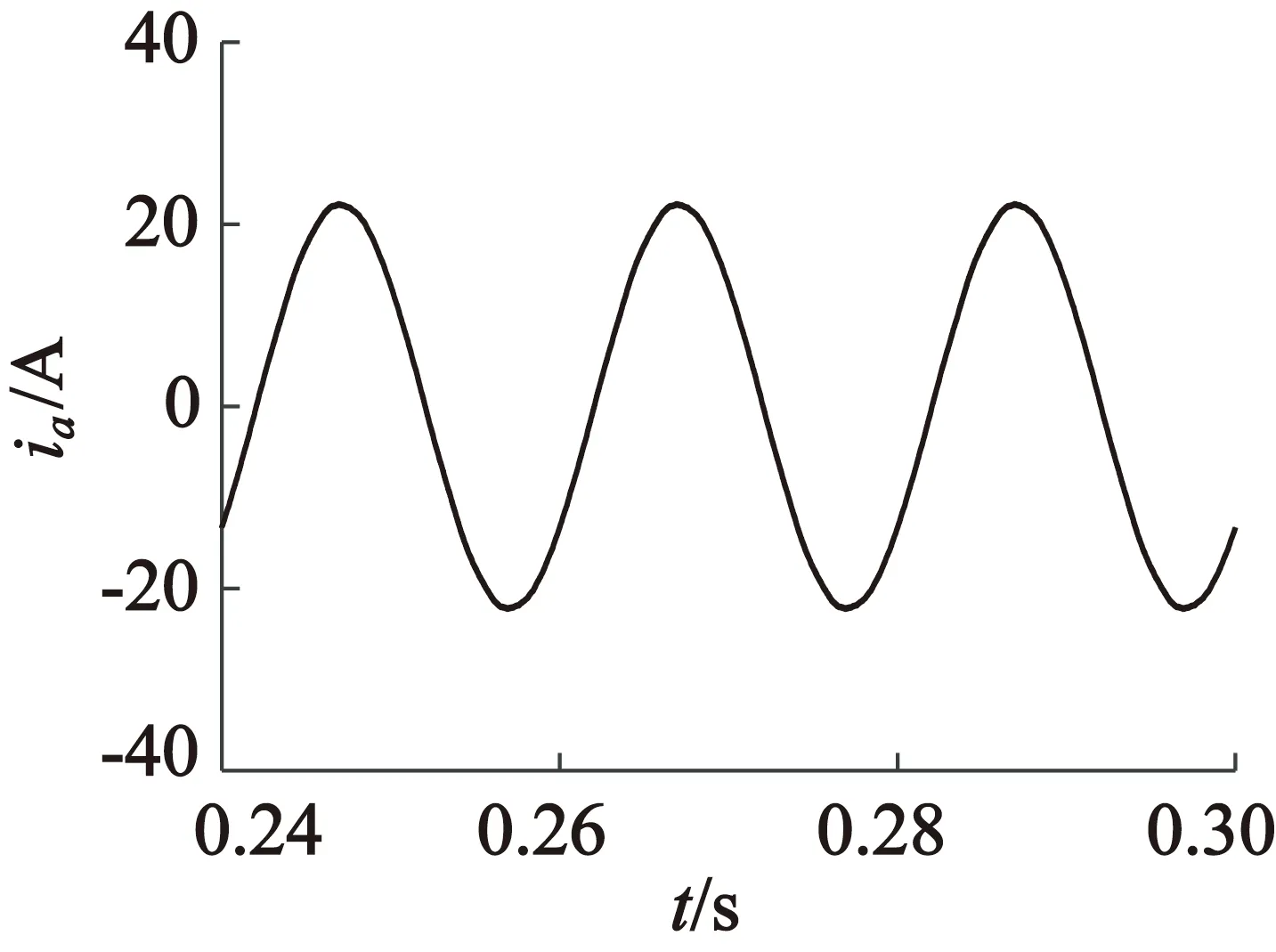

(a) 144°解耦调制
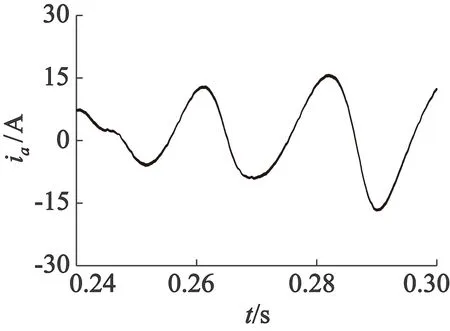

(b) 60°解耦调制图11 m=0.9时相电流波形及谐波频谱
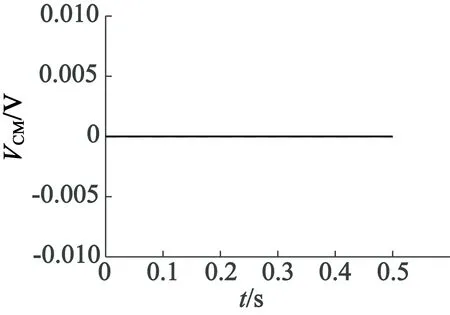

图12 m=0.5时输出共模电压仿真波形

(a) 144°解耦调制
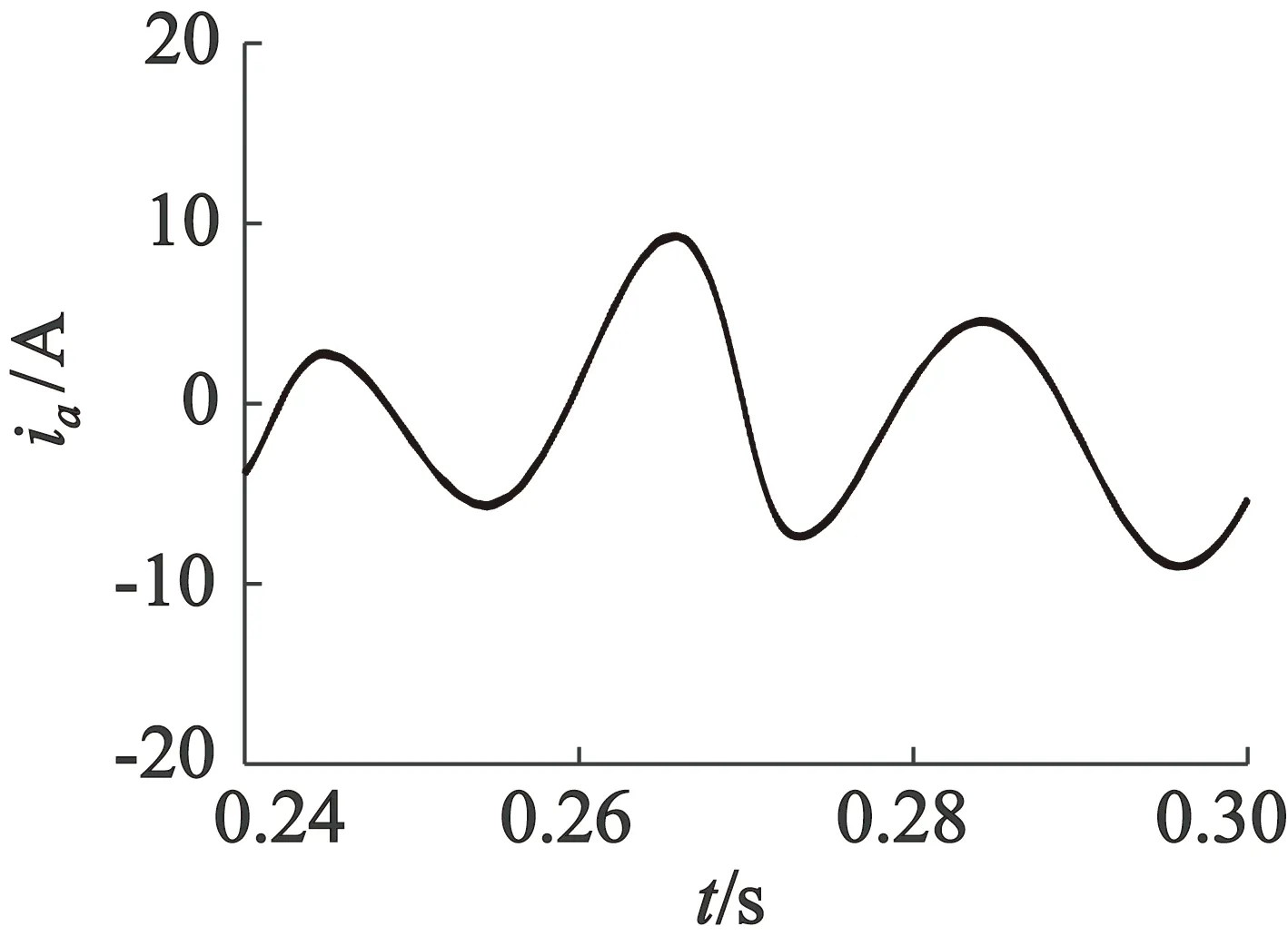
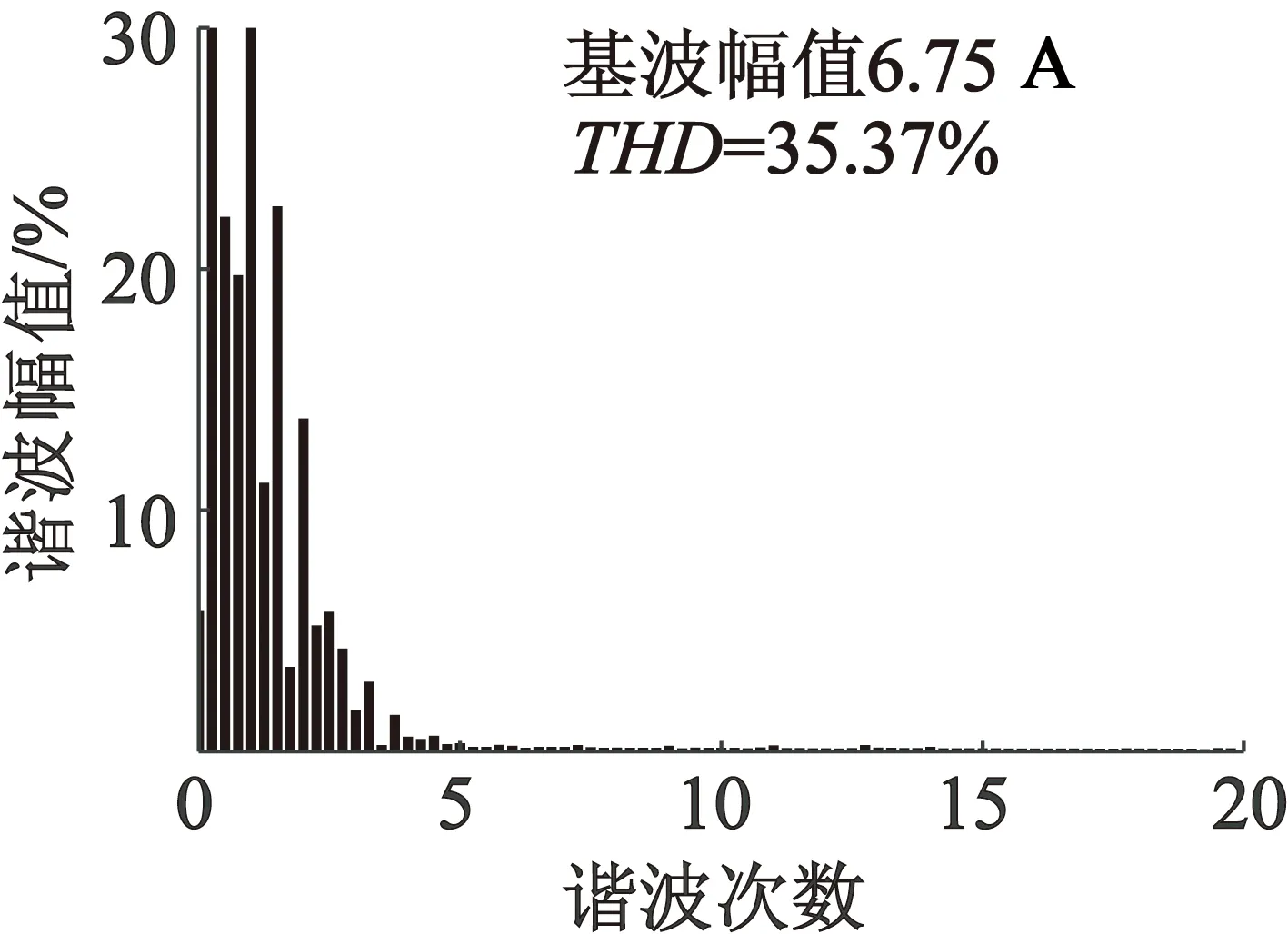
(b) 60°解耦调制图13 m=0.5时相电流波形及谐波频谱
为了更加直观对比在不同调制度下,144°解耦调制相对于60°解耦调制共模电压的抑制效果,将调制度为0.1~1.0之间取10组,分别进行仿真并对比相电流THD值,如图14所示。
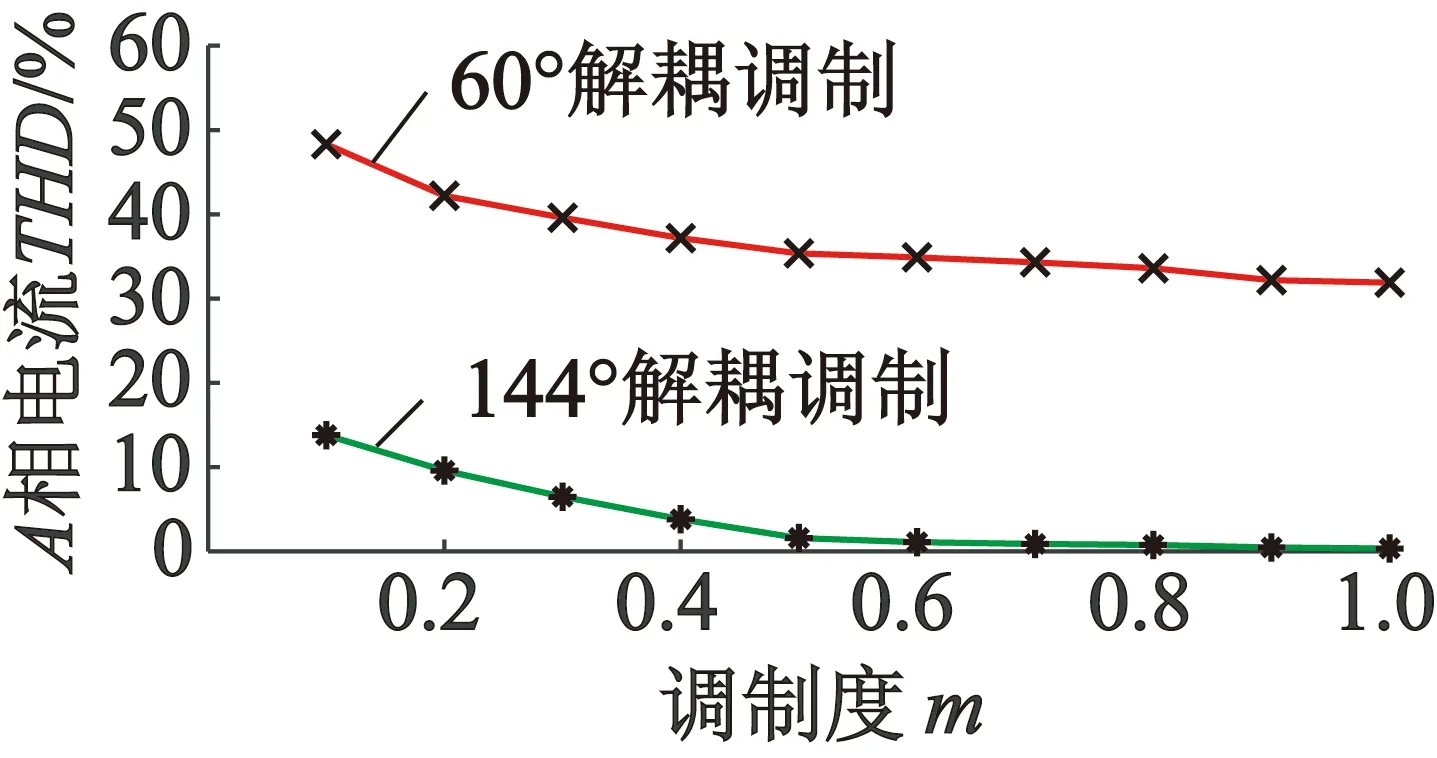
图14 0.1~1.0调制度下两种解耦 角度A相电流THD对比
由图10~图14仿真结果可知,本文的144°解耦调制算法在高调制度和低调制度时都能较好地抑制共模电压,且电机输出电流波形良好。当采用60°解耦调制即非144°解耦调制时,系统在高低调制度下都会输出±80 V的共模电压,这会使电机相电流产生很大的畸变,输出电流波形效果很差。由此可见,本文的144°解耦调制算法能较好地抑制系统共模电压。
6 结 语
本文借鉴三相开绕组电机双逆变器系统,基于空间矢量解耦抑制共模电压的思想,研究了针对五相双逆变器共模电压抑制的方法,结合空间矢量解耦思想和单个五相逆变器最近四矢量调制策略,有效地抑制了共模电压,仿真验证了此方法的正确性。
猜你喜欢
电源学报(2022年1期)2022-02-25
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
地震研究(2021年1期)2021-04-13
安徽科技(2021年3期)2021-04-06
微特电机(2020年11期)2020-12-30
日用电器(2020年9期)2020-10-15
航空世界(2018年12期)2018-07-16
电子制作(2017年1期)2017-05-17
新高考·高一物理(2016年1期)2016-03-05
