
小型旋转弹电动舵机控制系统的设计与实现
2020-01-14 03:37
自动化与仪表 2019年12期
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
旋转导弹的弹体在飞行过程中同时围绕弹轴作定速滚转运动。根据陀螺效应,旋转式导弹相比传统无旋弹在无控飞行时的弹体稳定性大大提升,同时系统对于安装误差和推动力偏心现象的鲁棒性得到有效改善[1]。然而为了在弹体旋转过程中产生某一固定方向的等效控制力,要求舵翼以与弹旋相同的频率持续进行正弦式往复摆动。这就对舵机的动态响应性能和控制精度提出了更高的要求。
伴随着日益突出的导弹小型化、轻量化、操作简易化、低成本的需求,弹径在100 mm以下的小型旋转导弹已经成为当前各国争相研制的热点内容。与之对应的,对于与弹径相匹配的、响应速度与控制精度满足旋转导弹要求的电动舵机控制系统的设计研究就成为了重中之重。为满足超小弹径旋转导弹对于舵控系统动态性能的需求,本文提出了一种采用C2000系列高性能MCU、集成H桥功率驱动芯片DRV8872的控制系统设计方案,对于电路进行了小型化设计以满足尺寸限制,并通过引入模糊PID算法显著改善了舵机动态性能。经实物性能测试,本方案有效缩小了系统体积,满足了动态特性设计指标。
1 弹载电动舵机控制器设计原理
从本质上说,舵机是一种经典的位置伺服控制系统[2]。舵机系统的整体结构框图如图1所示,舵机作为被控对象由直流有刷电机、减速齿轮组、传动机构、舵翼、角度传感器等组成,一部直流电机同时驱动两片舵翼,分别安装在弹首相对的两侧。
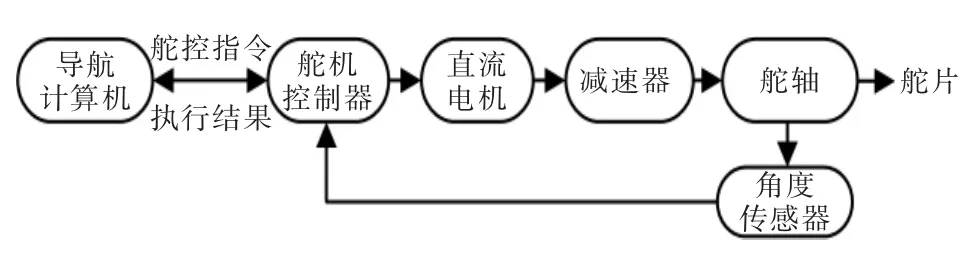
图1 舵机系统整体框图Fig.1 Rudder system overall block diagram
针对小型旋转弹弹上工作环境,本方案采用单通道控制以减小舵系统体积。控制方式采取正弦摆式控制率,舵机控制系统采取输出脉宽调制(PWM)波形的方式对减速电机进行转速控制。以电位器作为舵片偏转角度检测元件,核心控制逻辑为基于离散PID算法的位置闭环反馈控制。舵机设计参数要求如表1所示。
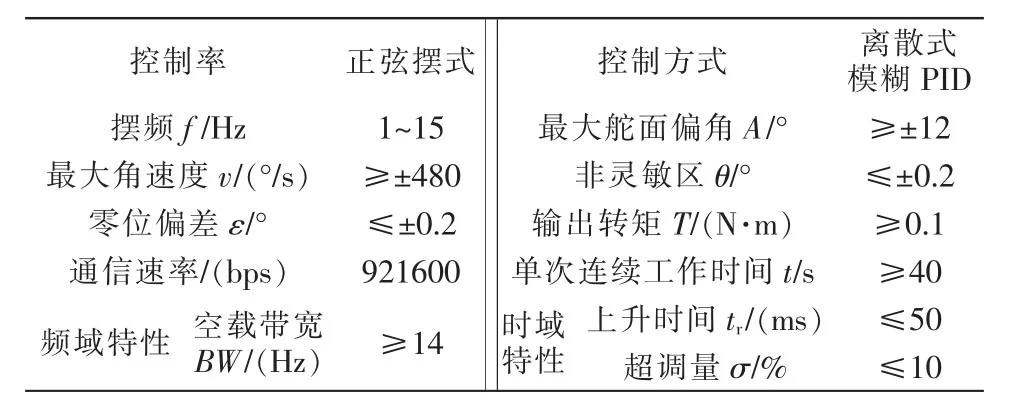
表1 舵机设计参数要求Tab.1 Rudder design indicator
2 控制系统电路设计
舵机控制电路实现二次电源转换、串行总线通信、控制信号生成与放大、电位器信号采样等功能,分为电源、控制和驱动三部分来实现。器件选型及电路设计以小型化、高精度、低功耗为原则进行。
2.1 电源模块
电源单元由输入滤波电路、LDO电压转换电路、输出滤波电路等部分构成。电源实现方案如图2所示。
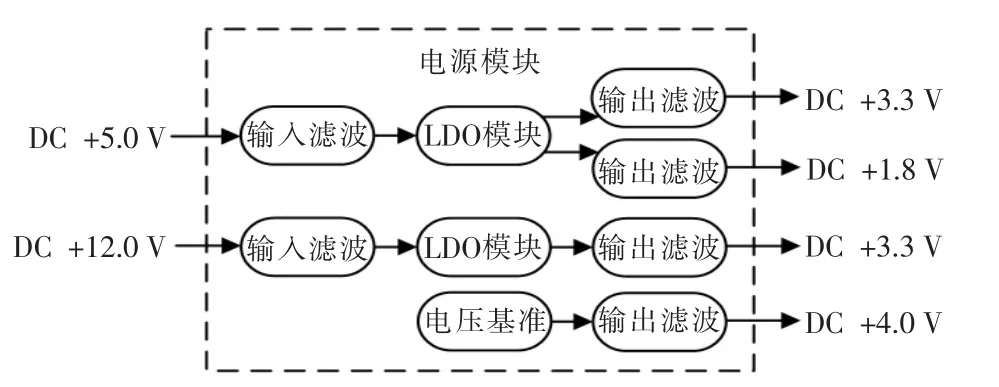
图2 电源实现方案Fig.2 Power implementation
电源单元将外部输入的+5 V及+12 V直流电压作滤波稳压处理,并将+5 V经LDO单元降压稳定为+1.8 V及+3.3 V供各数字芯片使用;将+12 V经LDO单元降压稳定为+3.3 V供光耦隔离模块使用。对于电源稳定性及带载能力具体要求为+5 V、+1.8 V及+3.3 V,电压精度小于±5%,额定电流大于200 mA,电压纹波小于50 mV;+12 V电压精度小于±10%,额定电流大于500 mA,电压纹波小于80 mV。
在所有电源相关输出引脚及输入引脚均就近放置去耦、旁路电容,另外在+5 V与+12 V输入端放置大容量钽电容作为板级去耦。为防止电机运作产生的电磁噪声经电源耦合进入控制电路造成干扰,必须对低压和高压供电电路的电源线及地线进行严格电气隔离。实际电路原理图如图3所示。
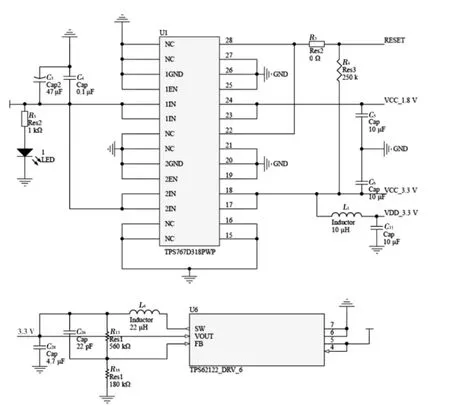
图3 电源模块原理图Fig.3 Power module schematic diagram
电压输出使用2个LDO芯片来实现。在电源各路输出端外部均放置由电感、电容组成的“π”型滤波器进行二次滤波处理,确保输出纹波电压满足要求[3]。ADC基准电压由专门的电压参考芯片REF3140提供。与ADC相关的所有零电位均视为模拟地,与数字地之间通过铁氧体磁珠电感隔离,起到降低高频噪声串扰的作用。
2.2 控制模块
控制电路以DSP为处理核心,实现总线通信、指令判读与反馈、舵面位置检测、模糊PID运算等功能。控制模块框图如图4所示。
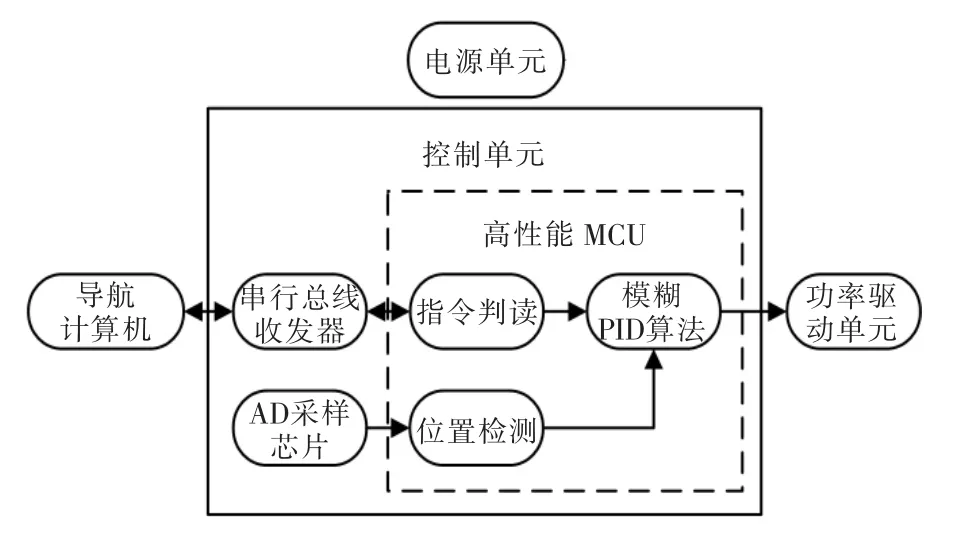
图4 控制模块框图Fig.4 Control module block diagram
控制单元通过RS422串行总线与导航计算机进行异步通信,工作在全双工状态。串行总线收发器采用MAX3462,通过RS422串行差分总线与上位机进行在线数据交换,通信频率为921600 b/s。差分总线具有良好的抵抗电源干扰的能力。
处理器作为舵控系统的核心,采用德州仪器高性能MCU TMS320F28035,其特点为高达60 MHz的工作频率,具有丰富的片上资源,并特别为实时控制进行结构优化,可同时输出多达四路高精度PWM控制信号。出于小型化设计要求,选择了该系列尺寸最小的56引脚VQFN封装 (超薄无引线四方扁平封装),平面尺寸仅为6.75 mm×6.75 mm。
为减轻MCU工作压力,同时提升反馈信号采样精度,采用外挂高精度ADC的方式进行电位计模拟信号采集。AD采样芯片采用德州仪器SAR型精密16位传感器ADS8319,采样率高达500 kS/s,电压分辨率达0.06 mV。ADC通过SPI总线与MCU进行在线数据交换。
控制模块设计原理图如图5所示。
2.3 驱动模块
舵机驱动单元接收舵机控制单元产生的PWM脉宽调制信号,驱动功率H桥电路,控制电机推动舵机输出轴转动。为确保PWM信号由控制单元向驱动单元的单向传输,避免因电机运转产生的高频噪声反向耦合,在两单元间采用高速光耦进行隔离。
调研报告用户画像显示,知识付费人群与出版社的读者人群高度重合。移动互联网时代的到来,正在改变人类的阅读习惯。新的技术及阅读习惯并不会导致书籍的消失,因为技术影响了需求,需求也影响了技术,它们只是相互影响,相互迭代。书籍作为社会和科学知识传播基石的地位没有改变,但是书的形态在未来会是多样的,而不再拘泥与纸质书。互联网知识付费产品正在向传统出版业发起冲击,试图开拓近700亿的图书市场。因此,传统出版业必须积极主动出击,应对这场变革,抓住机遇,以避免被时代淘汰。
驱动电路设计原理图如图6所示。高速隔离光耦采用东芝TLP2161,隔离电压为2500 Vrms,共模瞬态抗扰度20 kV/μs,电平转换速率为15 MBd。
电机驱动器采用德州仪器单通道H桥直流电机驱动器DRV8872。该驱动器通过4个N沟道MOSFET实现了电机的双向控制,运行峰值电流高达3.6 A。在电流衰减模式下,可通过输入脉宽调制(PWM)波形的方式调节电机转速。当两路输入均被置为低电平,DRV8872将进入休眠模式,有利于减少功耗。DRV8872还具备电流调节功能,能够将输出电流限制在某一水平,起到降低功耗、防止电机烧毁的作用。该驱动器无需大容量电容来维持电压稳定,对于舵机这种需要电机反复启动和停止的应用场景十分有益。
3 软件与算法设计
舵机控制软件实现422总线通讯、AD转换信号读取、模糊控制算法实现、PWM信号输出等功能。软件工作主流程如图7所示。
RS422总线通信采用中断接收、轮询发送的方式工作,仅在上位机指令到达时进入中断读取,避免长时间占用MCU计算周期。
AD采样子程序在每次执行PID控制前在线读取缓存中最新的角度传感器信号,保证了角度控制的准确性。
控制算法以离散式模糊PID作为算法核心,结合旋转弹正弦控制率,将每个正弦周期等分为60个位置点,每个点执行次PID运算,其中n为导弹自旋转速。通过算法结构优化,将相邻两次PID间隔时间压缩到500 μs,确保了控制精度及正弦曲线的平滑度。
3.1 舵机-上位机通信协议设计
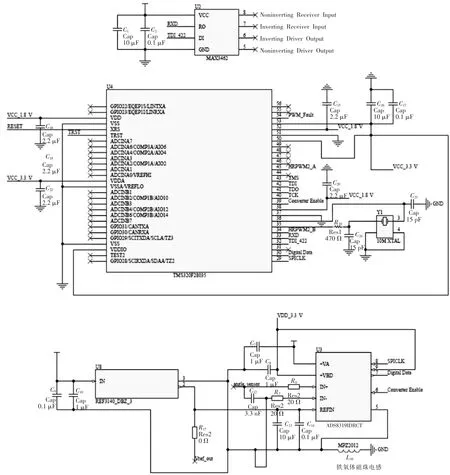
图5 控制模块原理图Fig.5 Control module schematic diagram
协议同时规定,舵机在每执行一次PID后也会向上位机回传执行结果。该回传数据包括舵机状态、控制指令编号、控制相位指令、PID执行次数、AD采样结果等内容。舵机测试软件可以根据此回传数据进行动、静态性能测试,实际飞行试验中飞控计算机将舵机回传数据另行存储,从而在实验结束后分析还原舵机实际执行情况。
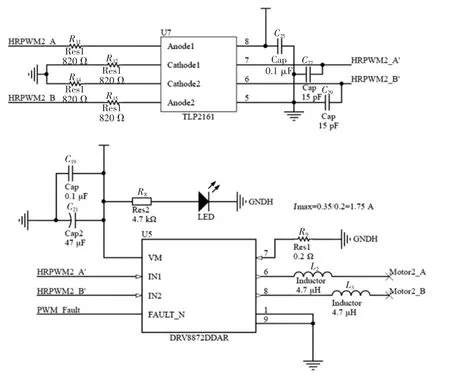
图6 驱动模块原理图Fig.6 Drive module schematic diagram

图7 主程序流程Fig.7 Main program flow chart
3.2 模糊PID控制算法
针对传统离散型PID单一的特征参数较难满足旋转弹转速变化范围大、动态响应要求迅速,且系统模型不确定的问题,在传统PID算法基础上引入了模糊PID智能控制算法[5]。该算法将系统误差及误差变化率作为控制量,通过模糊化与去模糊化过程,从而实现了系统工作过程中PID参数的在线动态整定。
4 实物性能测试
舵机控制系统硬件实物如图8所示。控制电路集成在一块六层PCB板上,可实现单通道舵机的位置反馈与控制驱动,并能与上位机通过RS422接口建立异步串行通信。
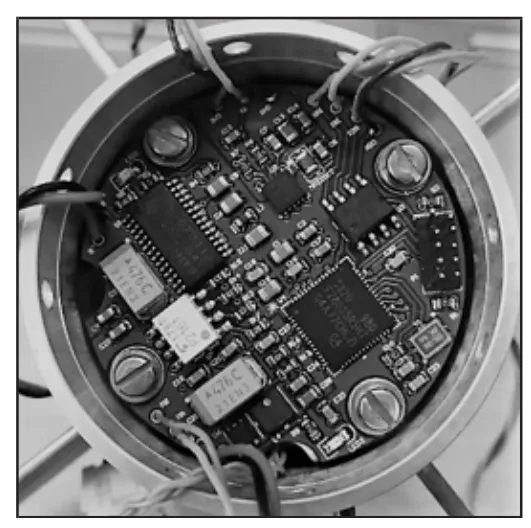
图8 电动舵机控制电路Fig.8 Electric rudder control circuit
利用图9所示的舵机动态性能测试软件对于舵机控制系统进行性能测试,产生如表2的测试报告。
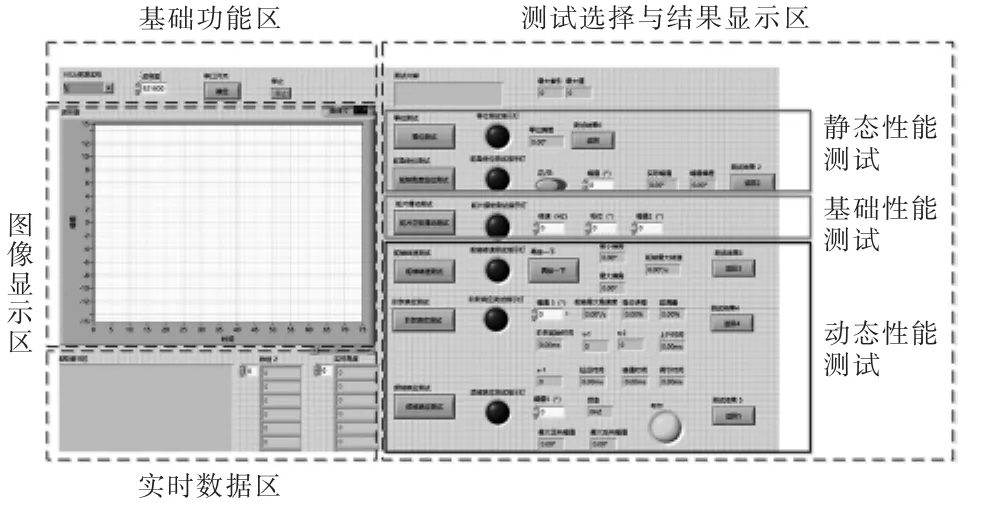
图9 舵机性能测试软件Fig.9 Rudder performance test software

表2 舵机动态测试报告Tab.2 Rudder performance test report
测试结果表明,基于本方案设计的舵机控制系统满足了系统动、静态性能设计指标。在表征动态特性的时域特性方面,离散型模糊PID算法的加入显著改善了系统的上升时间与超调量[6],使得本套电动舵机控制系统设计方案极其适合电机反复启停、正反转连续切换、伺服跟随性能要求严格的应用场景。
5 结语
本文从模块化设计的思路出发,提出了一种适用于小型旋转导弹的电动舵机控制系统设计方案。通过在硬件上选取高性能MCU、AD转换芯片、功率驱动芯片,在软件上采用模糊PID智能控制算法、优化控制逻辑、降低系统间通信频率的方式,实现了小型旋转导弹对于舵控系统高动态特性的设计要求。本文的研究成果经过静态测试、转台试验的验证,展现出了良好的动态特性,具有一定的实际应用价值。
猜你喜欢
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
阅读(快乐英语高年级)(2019年2期)2019-09-10
电子制作(2018年1期)2018-04-04
航空模型(2016年5期)2016-07-25
消费者报道(2016年3期)2016-02-28
风能(2016年12期)2016-02-25
科学家(2015年12期)2016-01-20
航空模型(2015年6期)2015-10-21
