
基于虚拟阻抗的孤岛微网并联逆变器间环流抑制策略
2020-01-13 07:48官弼刚梁亦峰
智能计算机与应用 2020年1期
刘 滔, 官弼刚, 梁亦峰
(南华大学 电气工程学院, 湖南 衡阳 421001)
0 引 言
随着化石能源等常规能源的不断消耗以及随之带来的环境污染日益严重,风能、太阳能等清洁可再生能源的开发利用受到全球的高度重视[1]。以分布式发电(Distributed Generation,DG)为支撑的微电网技术也得到了迅速的发展。微电网的优势在于既可以与大电网并网,又可以在孤岛运行模式下工作,而且可以在2种运行方式之间相互转换,这样可以保证其供电可靠性[2-3]。微电网中的微源主要包括风力发电、光伏发电、蓄电池等[4]。大部分分布式发电都是通过逆变器接入微电网,微电网孤岛运行时,并联逆变器间会存在环流,环流会使电力电子器件过热,影响逆变器的工作效率,严重时甚至会损坏逆变器[5]。所以,研究微电网环流抑制方法对实现微电网的稳定运行具有重要意义。
抑制环流最简单的方法就是外加限流电感法[6],但是要做到有效地抑制环流,往往需要在逆变器输出端串入较大的电感,从而使线损增大,传输效率降低,并且造价昂贵。因此,通过控制逆变器的输出来实现环流抑制的方法不断出现。文献[7]主要对 P-f、Q-U下垂和P-U、Q-f下垂控制进行了总结,并综合比较了相对应的各自优缺点。文献[8]在Q-U控制中加入了积分环节,并且通过功率负反馈来微调逆变器下垂控制系数,但是这种方法还是不能很好地抑制环流。文献[9]对传统的Q-U下垂控制环节进行了改进,设计了无功均分模式和电压恢复模式,并设计流程实现2种模式的协调运行。文献[10]在传统下垂控制的电压环中选用准谐振PR控制,配合以虚拟电阻的调节,来调整逆变器的等效输出,其中虚拟电阻根据参考电压设定值和额定负载电压值来选取适宜的值。但是这种方法只考虑了逆变器内部控制参数不一致时的情况。文献[11]在分析环流的产生时综合考虑了逆变器内部参数差异和外部连线差异,采用了在电压控制中加入虚拟电阻的逆变器并联运行环流抑制方法。但是虚拟电阻如何控制没有具体叙述。文献[12]通过改进下垂控制和虚拟电抗相结合的方法,实现有功和无功解耦,但是这种方法无功平均分配的准确度不高。文献[13]考虑了虚拟阻抗的分压会导致逆变器输出电压降低,提出让虚拟阻抗跟随负载端电压变化,来弥补逆变器输出电压的降落。文献[14]采用实时监测微电网各条线路的电压与电流,通过计算得到线路阻抗的实时值,并让虚拟阻抗参数跟随其调整。文献[15]为了减少由非线性负载引起的谐波,提出了基于重复和状态反馈控制的策略,通过状态反馈抑制滤波器的谐振,且不会有额外的功率损耗。
针对孤岛微电网逆变器并联系统线路连接阻抗不一致引起的环流问题,本文提出了一种基于虚拟阻抗的孤岛微网逆变器控制方法。逆变器采用下垂控制可以实现功率解耦,本文首先对孤岛运行模式下的微电网等效电路进行了分析,并得出了并联逆变器之间的输出无功相对误差和线路阻抗差值的关系式,在此基础上提出了使虚拟阻抗跟随无功相对误差变化,改变逆变器的等效输出阻抗,使各条线路阻抗达成一致,从而提高逆变器无功平均分配的准确度并有效抑制逆变器间的环流。
1 并联逆变器等效电路分析
微电网孤岛运行模式下的等效电路如图1所示,其中DG1和DG2都由分布式电源、三相逆变器和LC滤波电路三部分组成。图1中,Un(n=1,2)表示逆变器出口电压,Zon(n=1,2)表示逆变器等效输出阻抗,U0和ZL表示负载端电压和负载阻抗,Zln(n=1,2)表示线路连接阻抗,Zn(n=1,2)表示线路阻抗。
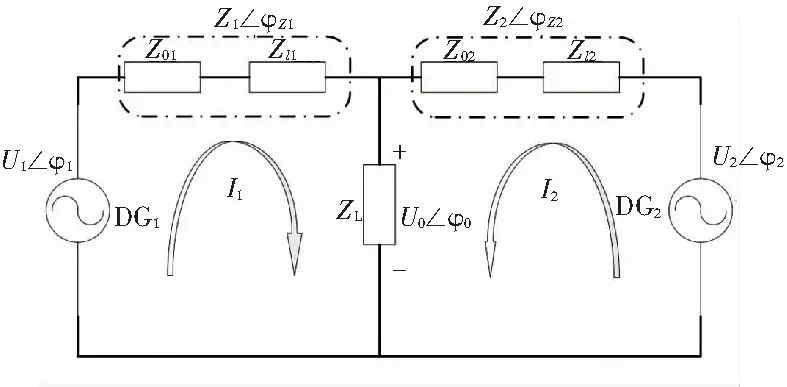
图1 微电网逆变器并联等效电路图
则逆变器输出电流为:
(1)
(2)
由图1可知,式(1)、式(2)中Z1和Z2满足:
Z1=Zo1+ZI1,
(3)
Z2=Zo2+ZI2,
(4)
由式(1)、式(2)可以看出,当2个DG结构完全对称时,只要二者的线路连接阻抗相同,其对应的输出电流就会相等,此时并联逆变器系统中不存在环流。但在实际工程应用中,由于分布式电源的分散性,每个DG的线路连接长度不同,线路连接阻抗就不相等,此时I1≠I2,并联系统中存在环流IH。环流大小为:
(5)
当DG1和DG2的控制系统参数完全相同时,即有U1=U2,Zo1=Zo2,若Zl1>Zl2,则有Z1>Z2,根据式(1)、式(2)可得I1
2 逆变器的下垂控制
下垂控制的基本原理:根据发电机的一次调频原理,各个微源的输出有功与频率呈线性负相关关系,输出无功与电压呈线性负相关关系。根据 P-f、Q-U下垂直线,可以通过频率来调整逆变器输出有功,通过电压来调整逆变器输出无功,从而实现系统的功率平衡。
由图1给出的微电网孤岛运行模式下的等效电路图可计算得出逆变器输出有功Pn和无功Qn分别为:
(6)
(7)
在微电网的实际线路中,其电阻远大于电抗。通过参数设计可以实现逆变器等效输出阻抗呈纯感性,使得逆变器线路阻抗呈感性,即有式(6)、式(7)中φZn=90°(n=1,2),则式(6)、式(7)可化简为:
(8)
(9)
通常逆变器的出口电压与负载端电压功角数值相差不大,可近似看作φn≈φ0,则sin(φn-φ0)≈φn-φ0,cos(φn-φ0)≈1。则式(8)、式(9)可化简为:
(10)
(11)
此时所对应的下垂控制方程为:
fn=fN-mPn,
(12)
Un=UN-nQn,
(13)
其中,fn和Un分别表示各个逆变器实际的频率值和出口电压值;fN和UN分别表示空载时各个逆变器出口电压频率和电压值;Pn和Qn分别表示各个逆变器实际输出的有功和无功;m和n分别表示P-f下垂系数和Q-U下垂系数。
当微电网工作在稳定状态时,整个系统的频率会是一个确定值,频率的全局稳定性可以实现微电网系统有功功率的分配平衡,此时系统中不会存在有功环流。但是逆变器出口电压在稳态时也会变化,逆变器出口电压的差异会导致逆变器输出无功功率不能平均分,此时系统中主要存在无功环流。将Un=UN-nQn代入式(11)可得:
(14)
即:
(15)
(16)
假设DG1和DG2的结构和控制设定参数都相同,则有UN1=UN2,n1=n2,此时各个微源输出无功相对误差为:

(17)
由式(17)可以看出,无功相对误差和各条线路的阻抗差值及逆变器的Q-U下垂系数有关。当增大Q-U下垂控制系数n时,无功相对误差会减小。但是根据式(13)可知,增大Q-U下垂控制系数会使逆变器出口电压降低,不能保证对负载的供电质量。当减小各条线路的阻抗差值Z1-Z2时,无功相对误差也会减小。因此,本文提出在传统下垂控制的基础上加入跟随无功相对误差自适应调整的虚拟阻抗,使各条线路的阻抗差值Z1-Z2变小,从而减小无功相对误差,达到抑制系统无功环流的目的。
3 引入虚拟阻抗的逆变器控制策略
3.1 虚拟阻抗的原理
加入虚拟阻抗后的孤岛微电网等效电路如图 2 所示。图2中,Z2表示DG2的线路阻抗(包括逆变器输出阻抗和连线阻抗),Zv表示虚拟阻抗(包含虚拟电阻和虚拟电感),ΔZ表示DG1的线路阻抗与DG2的线路阻抗的差值,即ΔZ=Z1-Z2。
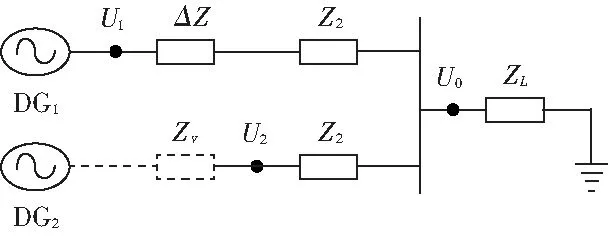
图2 加入虚拟阻抗的孤岛微电网等效电路
由图2可以看出,只要加入的虚拟阻抗等于线路阻抗的差值ΔZ就可以使并联线路完全对称,从而达到抑制环流的目的。但是在实际微电网线路中,连线阻抗Zl1和Zl2与连线长度成正比,这就使得线路阻抗Z1和Z2是不确定的,也就不能确定需要加入多大的虚拟阻抗才可以实现2条线路对称。因此只有通过能反映线路阻抗差值的量来自适应调节虚拟阻抗的大小。
3.2 加入虚拟阻抗的逆变器控制策略
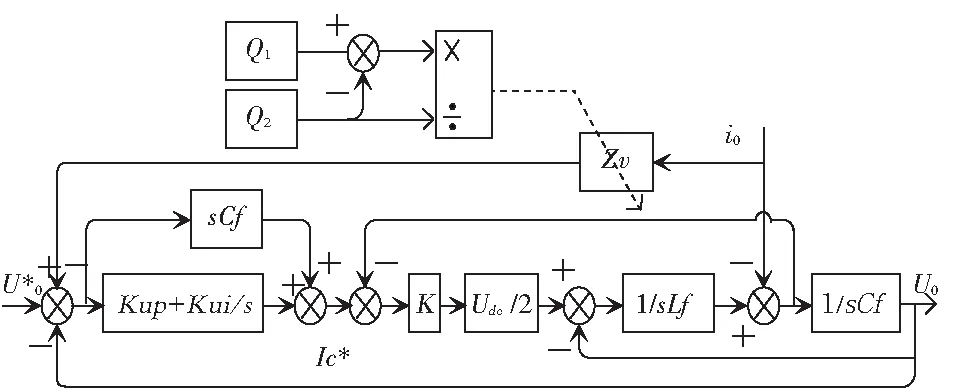
图3 加入虚拟阻抗的逆变器电压电流控制框图
Fig. 3 Voltage and current control block diagram of inverter with virtual impedance
4 仿真
用Matlab中的Simulink 建立微电网仿真模型,仿真电路见图1。其中,分布式电源由直流电源代替,2台逆变器除外部连接线路长度不相同外,其余控制参数均保持一致,具体的仿真参数见表1。
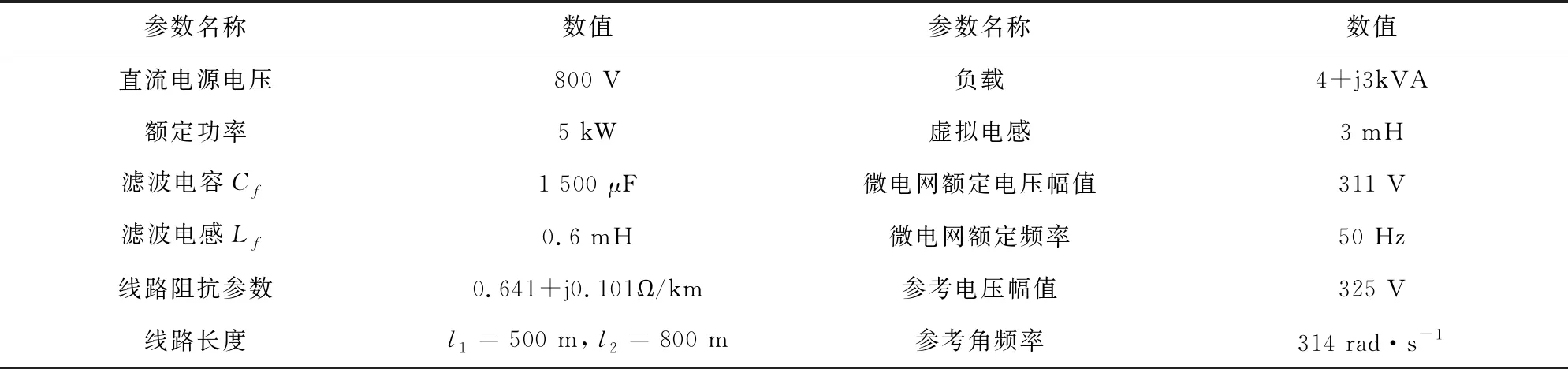
表1 仿真参数表
首先对逆变器选用传统下垂控制策略时进行仿真, P-f、Q-U下垂控制系数分别取:m=3e-5,n=5e-4,电压电流双环控制参数分别取K=5,Kup=10,Kui=100。仿真结果如图4所示。

(a)负载端电压波形图
(c)逆变器2输出电流波形图
(c)Inverter 2 output current waveform
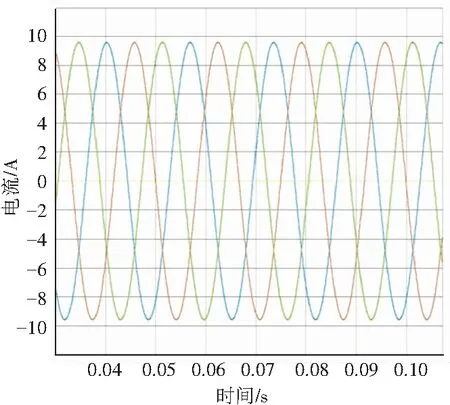
(b)逆变器1输出电流波形图

(d)环流波形图
图4 传统下垂控制仿真波形
Fig. 4 Traditional droop control simulation waveform
由图4(a)可以看出,逆变器采用传统下垂控制,系统输出电压接近额定电压幅值311 V,而图4(d)显示系统中存在较大环流,究其原因主要是微电网中2条线路连接阻抗不同导致2条线路的出口电压不相等。
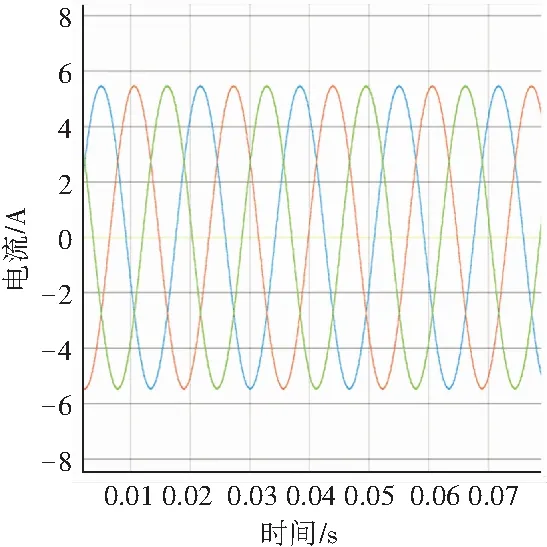
接下来,在电压电流双环控制模块中加入自适应虚拟阻抗控制进行仿真,得到如图5所示的仿真波形。
如图5(a)所示,加入虚拟阻抗后系统出口电压依旧满足额定值,大约310 V。如图5(b)、5(c)所示,两逆变器的出口电流十分稳定。对比图4(d)和5(d),本文提出的环流抑制策略具有更好的环流抑制效果,更有利于微电网的安全稳定运行。
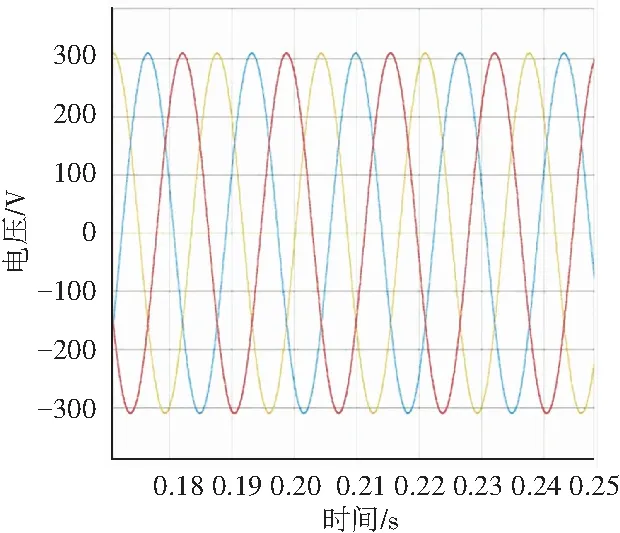
(a)负载端电压波形图
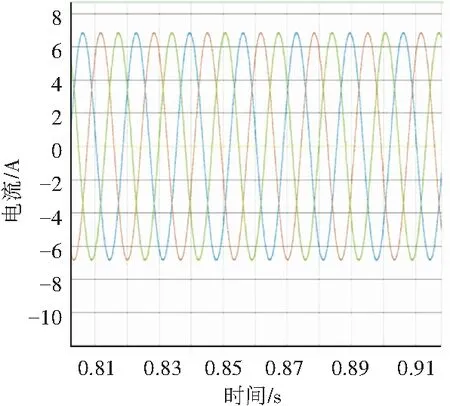
(c)逆变器2输出电流波形图

(b)逆变器1输出电流波形图
(d) 环流波形图
图5 引入虚拟阻抗的仿真波形
Fig. 5 Display of the simulated waveform of the virtual impedance
5 结束语
本文对孤岛微电网多逆变器并联运行等效电路进行了详细分析,当各微源及逆变器参数均保持一致时,各条线路连接线长度不一致是导致系统存在环流的主要原因。然后对逆变器的传统下垂控制策略进行了研究,在线路阻抗不匹配时采用下垂控制会导致逆变器输出无功分配不均,系统存在无功环流。根据公式推导得出了线路阻抗的差值与逆变器输出无功相对误差之间的关系,本文提出加入跟踪无功相对误差自适应调节的虚拟阻抗控制,更改逆变器的输出阻抗,消除线路阻抗之间的差异,从而减小逆变器无功相对误差并达到抑制无功环流的目的。对比2种控制方法的仿真波形可知,本文所提出的方法抑制环流效果更佳,更能提高系统运行的稳定性。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
粮食问题研究(2022年2期)2022-04-25
高中时代(2017年7期)2018-02-24
南方农业·下旬(2017年8期)2017-10-23
儿童故事画报·智力大王(2016年6期)2016-09-14
科技视界(2016年17期)2016-07-15
企业文化·中旬刊(2015年11期)2016-03-09
科技与创新(2014年8期)2014-07-17
学周刊(2009年11期)2009-12-15
数理化学习·教育理论版(2009年7期)2009-10-15
