
基于模糊PID 的无人帆船航向控制方法
2020-01-10 01:55张雪飞袁鹏谭俊哲王树杰徐泓燊孙烨
中国舰船研究 2019年6期
张雪飞,袁鹏*,2,谭俊哲,2,王树杰,2,徐泓燊,孙烨
1 中国海洋大学 工程学院,山东青岛266100
2 青岛市海洋可再生能源重点实验室,山东青岛266100
0 引 言
无人帆船在海上自主航行时,会受到海洋环境的影响,出现一些偏离预定轨迹的状态,因而一个有较强抗干扰能力的航向控制器,对于帆船的航迹保持、循迹航行具有十分重要的意义。
目前,对于航向控制的算法主要有经典PID,Backstepping,Lyapunov,滑模控制、神经网络控制,模糊控制和一些其他相互结合的智能控制方法等[1-2]。国内外很多学者对无人帆船的航向控制做了大量研究。其中,Deng 与Ahmed 等[3-4]通过模糊控制和PD 控制器来控制航向,并应用到了实际的导航路径规划中。Emami 等[5]通过建立Fossen 四自由度船舶数学模型,运用PID 算法实现了对一条小型无人帆船的航向保持控制。王倩等[6]根据操舵的专家经验,归纳总结并制定出了245 条模糊控制规则,并直接以舵角作为输出,对一个1.5m 的帆艇实现了循迹航行控制。沈智鹏等[7]针对无人帆船模型不确定、控制方向和外部环境扰动未知的情况,提出了一种RBF 神经网络自适应动态面航向控制方法。上述研究运用不同的控制方法,实现了对帆船航向的控制,而本文则将研究在不同航速和未知的随机干扰下,帆船航向的稳定性控制。
PID 控制器由于其简单的结构和明确的物理意义,对于特定的场景和精确的数学模型,具有很好的控制特点,仍被广泛应用于实际工程中。然而,传统PID 控制的效果很大程度上取决于其控制参数Kp,Ki,Kd的值,在复杂多变的情况下,很难在线实时调节PID 控制参数,所以,在控制过程中,往往会表现出较大的波动和高频转舵,甚至可能出现不可控的状态[8]。无人帆船在航行过程中会面临风、浪、流等因素的干扰,仅仅依靠传统PID 的调节,往往难以满足准确航向的控制要求。而模糊控制则可以根据实际操作的专家经验,无需确定的数学模型,制定出相应的控制规则,达到理想的控制效果[9]。因此,本文将设计一种结合经典PID 技术的模糊自适应控制器,根据调节PID 控制参数的实际经验,制定出相应的模糊控制规则,实现对PID 控制参数的动态调节,从而达到对帆船稳定控制的目的。
1 无人帆船数学运动模型
1.1 帆船模型参数
本文以自主设计的无人帆船模型为仿真研究对象。该船体(附体)与风帆主尺度如表1 所示,舵剖面选用NACA 0018 翼型。
1.2 帆船运动坐标系
在实际海面运动过程中,一般可以将帆船近似为一个具有六自由度的刚体。为便于对帆船的运动描述,建立了如图1 所示的2 种右手坐标系。其中,o0-x0y0z0是以t=0 时刻船舶重心为中心的惯性坐标系,o0-x0轴为静止水面正北方向,o0-y0轴为静止水面正东方向,o0-z0轴垂直水面向下。o-xyz是以船舶重心为中心的附体坐标系,o-x轴为船体轴线上,方向由船艉指向船头,o-y轴指向右舷,o-z轴指向水面。为了便于分析航向角ψ与舵角δ之间的关系,在满足研究要求的前提下,可以忽略横摇、纵摇、垂荡的运动,只考虑横荡、前进、艏摇运动,将帆船运动简化为三自由度的数学运动模型[10-11]。

表1 无人帆船模型主尺度Table 1 The main dimensions of small autonomous sailboat model

图1 船体坐标系Fig.1 The coordinate system of hull
1.3 Nomoto 运动数学模型
根据牛顿关于质心运动的动量和动量矩定理,结合坐标系和速度转换关系,建立无人帆船在静水中的三自由度数学运动模型[12-13]:

式中:m 为船的总质量;uG,vG,u̇G,v̇G分别为重心处前进和侧向速度,以及其对时间的导数;r,ṙ分别为艏摇角速率及其对时间的导数;Fx,Fy,Mz分别为在x,y,z轴重心处作用的外力和外力矩;IzG为船舶绕轴z0的转动惯量。再从控制工程的角度出发,考虑船体艏摇角的变化与舵角运动的关系,根据帆船的水动力学模型和输出方程,将式(1)的三自由度状态空间方程转化为传递函数表达式,简化得到著名的Nomoto 数学模型:

式中:回转性参数K 和稳定性参数T 分别为操舵后的角速度和达到最高旋回角速度所需时间;s为拉普拉斯变换因子。
1.4 舵机数学模型
舵机在实际控制过程中具有一定的延迟效应,在某种程度上会影响到航向控制的精确性,一般可以将舵机看作一阶惯性环节[14]:

式中:δc为目标舵角;T0为舵机的时间常数,一般取1~3 s,本文仿真中取T0=1。
2 无人帆船航向控制方法
不同特性的帆船在海上航行时会有不同的禁航区域,一般认为此区域在逆风30°~45°之间,此时,需要采用Z 型抢风航行,除此外,帆船可以实现任意航向的航行[15]。而在具体的直航段,无人帆船的航向控制方法会有所不同,其控制效果也会有明显的差异。为了实现响应快和稳性高的航向控制,本文采用了模糊PID 控制法。
2.1 模糊PID 控制器设计
传统PID 算法对航向进行控制时,以给定的目标航向角ψc与当前实际航向角ψ的偏差e作为控制器的输入,以舵角值δ作为输出。模糊控制器对于某一给定的航向角,会不断地根据偏差e和偏差率ec,通过制定的模糊规则,输出Kp,Ki,Kd的值,然后与原PID 值进行并联控制,输出目标舵角δc,再经过舵机系统,对被控对象输入确定的舵角值。如此循环,不停地调节帆船的航向,直至实际航向角与目标航向在预期的误差范围内,并达到稳定的动态控制状态。控制器的整体控制流程如图2 所示。

图2 模糊PID 控制系统Fig.2 Fuzzy PID control system
目前,模糊控制和PID 控制相结合的方式主要有:相互切换型控制、并联混合型控制和参数整定型控制。相互切换型控制方法一般是在较大误差范围内选用模糊控制,较小误差范围内转化为PID 控制;并联混合型控制方法是根据PID 整定的参数加上模糊控制的参数,并联进行控制;参数整定型控制方法是利用模糊控制器,根据模糊规则,通过在线整定PID 参数来控制。由于并联混合型控制较灵活,本文采用此种方式。
2.2 模糊控制规则设计
本文采用的模糊控制规则,主要是根据PID整定的专家经验:当偏差e较大时,为了使系统具有较好的追踪反应性能,避免出现较大的超调量,应取较大的Kp和较小的Kd,Ki值;当偏差e中等时,为了具有较小超调量和缓和的系统响应,应取较小的Kp和适中的Kd,Ki值;当偏差e较小时,为使系统具有较好的稳定性能,防止系统在设定值附近出现波动,应取较大的Kp,Ki值;当偏差率ec较大时,取较小的Kd值,通常情况下Kd为适中值。通过实际调整的过程,制定了如表2所示的49 条规则。其中,模糊控制的输入e,ec和输出Kp,Ki,Kd的7 个论域范围均为(-1,1),其模糊子集均为NB,NM,NS,ZE,PS,PM,PB,分别代表负大、负中、负小、零、正小、正中、正大。
在仿真过程中,先将输入量e,ec做归一化处理,再将输出Kp,Ki,Kd按照PID 控制范围加入适当的增益。e,ec的变量子集区间如图3(a)所示,隶属函数为smf,zmf 和trimf;Kp,Ki,Kd的变量子集区间如图3(b)所示,隶属函数为trimf。同时,采用Mamdani 的模糊控制方法,变量子集的模糊交、或、推理、聚类输出、反模糊化方法分别为“min”,“max”,“min”,“max”,“centroid”。

表2 Kp,Ki,Kd 模糊控制规则Table 2 Fuzzy control rules for Kp,Ki and Kd
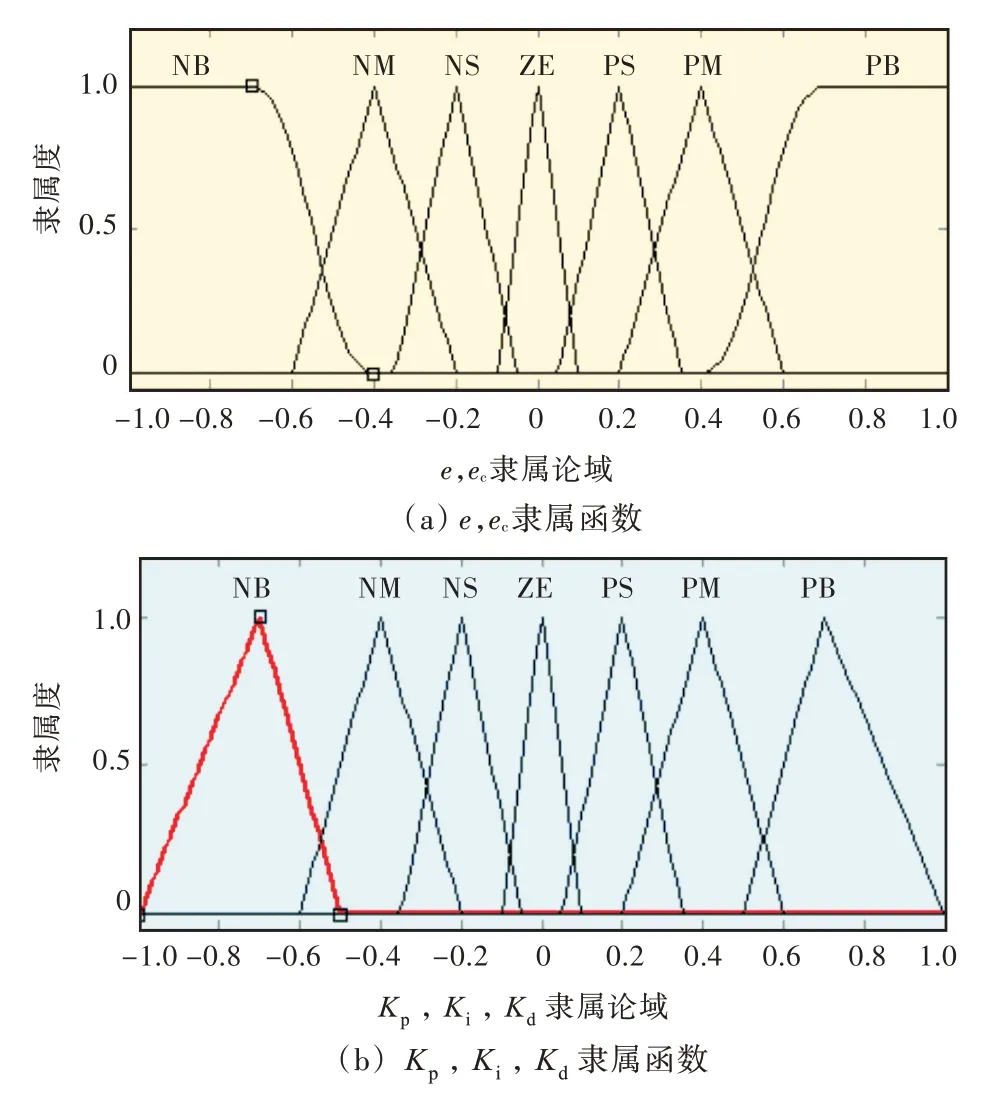
图3 模糊变量子集Fig.3 Fuzzy variable subset
2.3 控制器仿真模型搭建
借助Matlab 的Simulink 仿真工具,根据PID 的控制原理和图2 设计的模糊PID 控制器,搭建了如图4(a)所示的传统PID 控制仿真模型,和图4(b)所示的模糊PID 控制仿真模型。其控制过程如图5 所示。首先,根据设定的目标航向角与当前的实际航向角对比,计算出偏差和偏差率,判断帆船是否处于目标航向,若出现偏航,则控制器通过对舵的调整来进行航向控制,最终达到目标航向。其中,模糊PID 中的并联混合控制器在运行时会不断检测e与ec,通过制定的模糊规则并利用模糊推理的方法,在线实时生成控制器的3 个控制参数,再与设定的固定PID 参数值叠加进行舵角的控制,从而实现航向的控制。
帆船的实际航向除了受到舵的主要控制外,还会受到风、帆、浪、流等因素的干扰影响,而这些影响因素往往表现出很强的非线性和时变性,难以提前预测和建立准确的数学模型。这些未知因素最终会对帆船的航向造成影响,出现一定的偏航现象。在仿真模型中,加上特定范围内的随机干扰模块,每0.5 s 产生-4~4 之间的随机数。同时,也加入了舵角监测模块,由此可以检验控制器的控制方法是否具有较好的动态控制性能。
3 仿真分析与试验对比
3.1 仿真分析
本文以实尺度的帆船模型进行仿真模拟研究。假设船的初始航向角和舵角值均为0,设定目标航向角ψc=120°,处于非逆风航行区域,根据理 论 计 算 公 式:Kp=T⋅Wn

图4 控制器仿真模型Fig.4 Controller simulation model
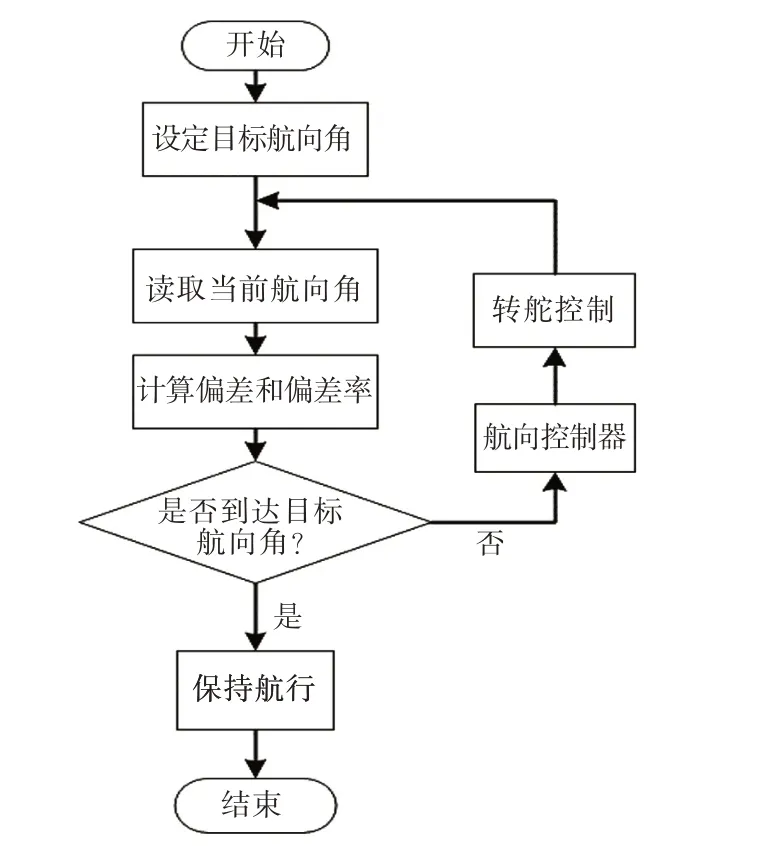
图5 控制流程图Fig.5 Control flow chart
2/K,Ki=T⋅Wn3/K,Kd=(2T⋅ε⋅Wn2-1)/K,其中Wn,ε分别为系统的自然频率和相对衰减系数。适当修改得出PID 控制参数Kp=0.42,Ki=0.001,Kd=1.12。由于航速不同,帆船的回转性参数K 和稳定性参数T 也会有所不同,当航速V 分别为2.0,2.5 和3.0 m/s 时,回 转 性 参 数 分 别 为-21.99,-27.49,-32.98,稳定性参数分别为-22.96,-18.36,-15.30。
不同航速下,2 种控制仿真对比结果如图6 所示。从图中可以看出,这2 种控制方法均能实现航向的控制,但控制效果有所差别。当航速V=2.0 m/s 时,传统PID 控制在3 s 左右达到目标航向角,并出现了20°左右的最大超调量,在10 s 左右趋于稳定;模糊PID 控制的调节时间约为6 s,无超调量。当航速V=2.5 m/s 时,传统PID 稳定控制时间约为9 s,最大超调量为10°;模糊PID 控制调节时间约为7 s,无超调量。当航速V=3.0 m/s 时,传统PID 控制调节时间约为12 s,最大超调量为5°,并出现了一定的波动情况;模糊PID 控制调节时间约为6 s,无超调量。

图6 两种控制方法的仿真对比Fig.6 Simulation comparison of two control methods
传统PID 控制和模糊PID 控制的主要控制性能参数如表3 所示。从表中可以看出,模糊PID 和传统PID 相比有较短的稳定调节时间和更小的操舵角,且均未出现明显的超调量和波动情况。由于传统PID 参数固定,往往是在船舶到达目标航向角并出现一定的超调和偏差后,才进行转舵的控制。而模糊PID 能够动态调节参数,在即将到达目标航向角时提前进行转舵的控制,使其在面对不同的航速和复杂的海洋环境干扰下,表现出很好的控制效果和较强的自适应能力。

表3 传统PID 与模糊PID 控制对比Table 3 Comparison between traditional PID and fuzzy PID control
3.2 试验对比
本次试验的船体结构如图7 所示,使用的控制板有主控板和驱动板,配备的传感器主要有超声波风速风向仪、帆角编码器、电子罗盘、GPS 和温湿度变送器,执行机构有转帆的无刷直流电机和操舵的电动推拉杆,不同距离分别采用GPRS与2.4 GHz 无线通信。地面基站处,无人帆船监控软件监视实时返回的数据和控制数据。无人帆船监控软件是使用Visual Studio 软件编写的MFC 应用程序,可实时监控船舶状态、修改参数、记录数据文件等。该执行信号由基站通过Modbus 传输至船载主控模块,再将控制信号通过CAN 总线传输到驱动模块,实现对执行机构的控制。
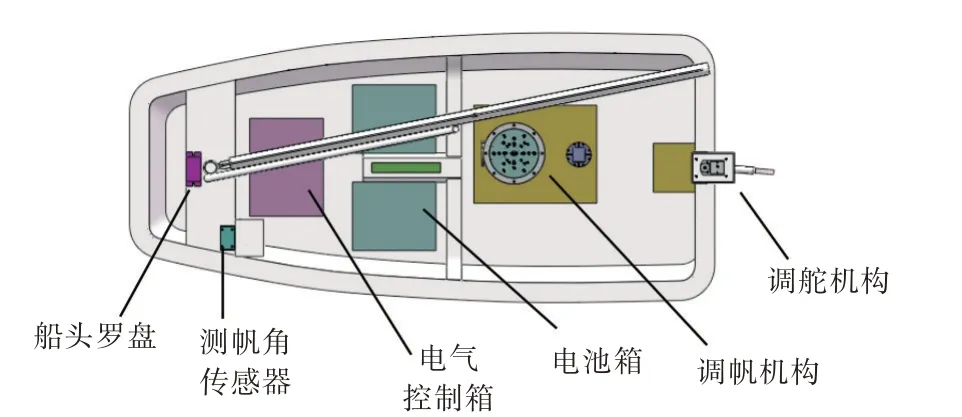
图7 船体结构Fig.7 Ship structure
试验过程中,通过电子罗盘实时检测帆船的航向角,并与设定的目标航向角进行比较,得出航向偏差作为控制器的输入,通过传统PID 或模糊PID 输出舵角值,对执行机构进行舵角的控制。试验时,设定目标航向角为25°,帆船航迹和航向角如图8(a)和图8(b)所示,分别运用传统PID 与模糊PID 这2 种方法对帆船给定航向进行控制,湖试情况如图8(c)所示。在较小的风、流干扰下,对处于非逆风航行的帆船,从试验数据对比结果可以看出,模糊PID 与传统PID 均能实现目标航向的控制,但传统PID 的轨迹偏差和航向角波动较大,而模糊PID 则能较快地到达目标航向角且较稳定。综合情况下,模糊PID 具有更好的航向控制效果。
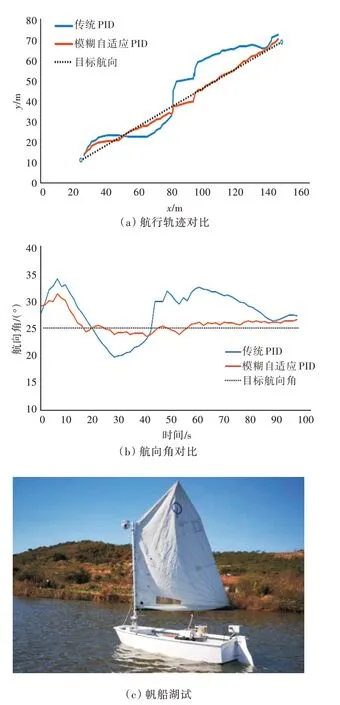
图8 试验对比结果Fig.8 Experimental comparison results
4 结 论
本文以自主设计的无人帆船模型为研究对象,根据帆船的实际特征参数建立运动数学模型,采用模糊PID 方法设计控制器,对帆船航向进行仿真控制研究,与传统PID 控制方法进行对比并进行了试验验证。
通过对航向控制仿真及试验结果分析发现,以不同的航速到达同一航向角,2 种针对帆船的控制方法实现情况有所差异。模糊PID 控制器具有较快的稳定调节时间,较小的超调量和操舵角,以及较强的抗干扰能力,能够实现对帆船航向的稳定控制。综合整体对比结果可知,基于模糊PID 的方法可以应用到小型无人帆船的航向控制,并且对于无人帆船的智能航向具有一定的参考价值。未来也可以应用该方法进一步考虑帆和舵的联动控制,考察其对帆船航向的影响和控制效果。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
汽车实用技术(2022年3期)2022-02-23
科技与创新(2021年24期)2022-01-03
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
民用飞机设计与研究(2019年4期)2019-05-21
小天使·二年级语数英综合(2018年7期)2018-09-11
阅读与作文(小学低年级版)(2016年6期)2016-11-14
