
基于虚拟样机技术的车载火炮射击稳定性仿真*
2020-01-08 03:33贾长治杜中华
火力与指挥控制 2019年11期
李 杰,贾长治,杜中华
(陆军工程大学石家庄校区,石家庄 050003)
0 引言
车载火炮将轻量化通用卡车底盘与原牵引火炮的火力系统有机结合,并配置火控系统、总体直属单体等结构,以战略战术机动能力强、火炮威力大、自动化程度高、列装成本低等优势得到了迅速发展。然而,车载火炮并非“车+炮”的简单组合,车炮不匹配极易导致车载火炮总体性能较差,故车炮匹配性设计一直是困扰设计者的“瓶颈”问题。目前,现役某型车载炮射击稳定性较差,射弹散布较大,其根源即车炮匹配设计不足[1]。作为车载车炮匹配性评价的重要指标,研究射击稳定性对于匹配性设计与优化具有重要意义。
对于火炮射击稳定性问题,文献[2-4]分别从稳定性数学模型、刚柔耦合、土壤条件及轮胎与地面的接触情况等方面进行了分析,但研究仅针对于牵引火炮的某些特定工况,对于车载火炮而言,没有研究获得火炮结构参数对稳定性的影响规律和显著程度,导致在对车载火炮进行射击稳定性优化时略显盲目。因此,本文通过建立某型车载榴弹炮的参数化虚拟样机模型,拟研究车载火炮射击稳定性随火线高等结构参数的变化规律,研究备选优化参数集,为车载火炮的车炮匹配性评价与优化研究提供重要依据。
1 车载炮发射虚拟样机建模
虚拟样机技术改变了传统的机械设计过程,通过虚拟样机代替物理样机,不仅缩短了设计研发周期,同时也大大降低了研发成本[5]。通过三维建模软件SolidWorks 与ADAMS 相结合使用,可大大提高建模效率。
1.1 火炮拓扑结构分析
根据车载火炮的受力情况可知,火炮后坐部分在炮膛合力、制退机力和复进机力的作用下沿身管轴线完成后坐和复进运动;在射击过程中,车轮不接触地面;液压支撑装置、底盘悬挂系统、高低机、方向机等均处于闭锁状态;高低机与方向机由于涡轮蜗杆的间隙,分别造成摇架沿耳轴轴线、上架沿座圈中心做轻微的旋转振动。依据火炮在射击时的受力及运动状态,可知车载火炮的拓扑结构如图1所示。其中,H1为平移副,H2为旋转副,H3为固定副,H4为平面接触副。
1.2 发射动力学模型
在火炮发射过程中,后坐部分受到的主动力为炮膛合力Ppt、后坐部分重力mhg、制退机力φ0(复进时提供液压阻力φ0f和复进节制器液压阻力φff)、复进机力Pf及相关摩擦力T 等[6]。
图1 某车载火炮拓扑结构图
由于火炮的受力和运动情况较为复杂,模型通过加载Fortran 语言编译的力学模块实现动力学仿真。火炮后坐部分的后坐与复进过程微分方程可描述为:
1.3 发射虚拟样机模型建立
根据车载火炮的拓扑关系,本文建立了17 个刚体,22 个自由度的虚拟样机模型(如下页图2 所示)。在模型中分别用扭簧阻尼器来模拟高低机和方向机中涡轮蜗杆碰撞产生的约束反力。在火炮后坐的过程中,支撑机构会受到土壤的约束反力的作用,文中对土壤的结构和力学性能进行简化,以弹簧阻尼器模拟土壤的支持力与摩擦力;火炮在射击过程中悬挂机构处于自锁状态,车轮不与地面接触,故悬挂系统与底盘通过固定副连接,车轮与地面之间不建立约束。炮膛合力、制退机力、复进机力等较为复杂,通过Fortran 编写自定义程序,经ADAMS编译生成.dll 动态连接库文件,加载于模型并实现仿真[7-8]。

图2 某122 mm 车载火炮虚拟样机
火炮射击时车载底盘及上架、摇架部分在后坐阻力的作用下具有向前翻转的趋势,以高低射角0°,方向射角0°,全装药,常温装药为基本工况,对某车载火炮模型进行仿真。部分仿真曲线如图3~图9所示。

图3 后坐位移曲线
图4 后坐速度曲线

图5 后支撑跳高曲线
图6 车体偏航角曲线

图7 车尾侧角曲线
图8 炮口横向速度曲线

图9 炮口横向位移曲线
根据仿真结果,车载火炮在0.13 s 左右完成后坐运动,在0.8 s 左右完成复进运动,后坐位移峰值(Smax)为856.027 3 mm,后坐速度峰值(vmax)为1.344 9×104mm/s,后支撑最大跳高(h)为2.555 2 mm,车体偏航角(θ1)为0.010 6°,车尾侧角(θ2)为0.036 2°。仿真与试验数据对比如表1 所示。

表1 后坐稳定性仿真结果与试验结果对比表
由表1 可知,结果对比误差均未超过6%,表明了所建虚拟样机模型的可信性,证明该虚拟样机可以基本反映某122 mm 车载火炮的动态特性。
2 结构参数选取及灵敏度分析
2.1 稳定性分析模型
车载火炮在受力后坐的过程中,驻锄竖直跳动几乎为零,因此,可以近似认为射击时火炮有绕驻锄支点向前翻转的趋势。根据车载火炮受力情况,若保证在射击时车载火炮有必要的稳定性,则有[9]:

文中仅在对射击稳定性影响较大的0°射角下对车载火炮的射击稳定性进行了分析,即φ=0°。又由于全炮的质量mz由后坐部分质量mh和炮架部分质量mj共同构成,根据质心合成定理,后坐某一瞬时mzgLφ=(mhLx+mjLj)g。故式(7)可整理为:

式中,mh为后坐部分质量;Lx为后坐某瞬时,后坐部分质心到驻锄支点的距离(当φ=0°时,Lx是关于后坐位移X 的函数);mj为炮架质量;Lj为炮架质心到驻锄支点的距离;Fpt为炮膛合力;Le为后坐部分质心到炮膛轴线的距离;FR为后坐阻力;h 为火线高。
由式(8)可知,影响车载火炮射击稳定性的主要因素为Lx、Lj、h、mh、mj等。炮架部分质量mj主要由底盘质量md、上架部分质量ms、摇架部分质量my组成,其中底盘质量md约占炮架质量mj的91%。又Lx、Lj两个位置参数与驻锄、火力系统在整炮中的布局位置密切相关,故本文重点对火力系统安装位置、液压驻锄安装位置、火线高、后坐部分质量、底盘质量等5 个方面对某122 mm 车载火炮的射击稳定性进行仿真分析。
为形象表示驻锄与火力系统在整炮中的布局位置,文中分别以驻锄支点与后支撑中心的距离(即支撑间距)L1、火力系统座圈圆心距后支撑中心距离L2代替参数Lj、Lx。设常数c1为炮架质心距后支撑的距离,则有Lj=L1-c1;又Lx是关于后坐位移X的函数,设LX=F(X)+(L1,0-L2),其中常数L1,0为支撑间距初始值。由于火炮型号确定,则F(X)变化规律确定,因此,变量Lx可由变量L2代替。各参数示意如图10 所示。

图10 结构参数示意图
2.2 变量设计方法及结构参数设置
变量设计方法是参数化建模的核心,通过变量设计可以方便地修改各参数的值,极大地提高了模型建立与修改的效率。ADAMS 中提供了4 参数化建模方案:使用参数化表达式、参数化点坐标、运动参数化、使用设计变量。为研究某车载火炮的后坐稳定性规律,方便修改相关参数,文中应用参数化坐标的方法对火线高h、支撑间距L1、座圈圆心距后支撑距离L2、后坐部分质量mh、底盘质量md进行了参数化处理。各设计变量的参数代号及物理含义见表2,各参数初始值及上限设置如表3 所示。
2.3 仿真结果分析
图11~图15 分别为车载火炮后支撑跳高与相关参数的变化规律的仿真结果。
表2 设计变量与物理含义对照表
表3 结构参数初值及上下限
图11 后支撑跳高随火线高变化曲线

图12 后支撑跳高随驻锄位置变化曲线

图14 后支撑跳高随后坐部分质量变化曲线
1)由图11 可知,后支撑的离地高随火线高的增大而增大,随火线高的降低而降低。
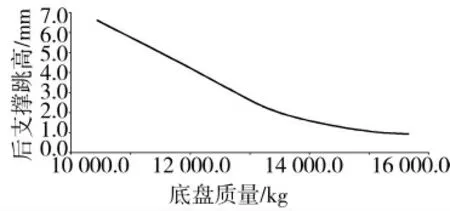
图15 后支撑跳高随底盘质量变化曲线
2)根据式(8),液压驻锄的安装位置直接影响了后坐部分质心与炮架质心距驻锄支点的距离。由图12 可知,驻锄位置前移时后支撑跳高降低;驻锄位置后移时后支撑跳高增大。
3)图13 所示结果为改变火力系统的安装位置后车载火炮后支撑的跳动情况。火力系统位置前移,L3减小,后支撑跳高增加;反之,后支撑跳高减小。
4)根据图14 可知,后支撑跳高对后坐部分质量的增大而逐渐降低。当mh≤1 250 kg 时,后支撑跳高变化较为明显;当mh>1 250 kg 时,后支撑跳高基本稳定与0.94 mm 左右。
5)根据式(8),增大md(即增加炮架质量mj)可以有效地增大火炮后坐时的稳定力矩。由图15可知,后支撑跳高随md的增大而减小,且曲率逐渐变缓;当md≥15 000 kg 时后支撑跳高基本稳定于0.9 mm 左右。
虽然通过动力学仿真可得后支撑跳高随各参数的变化规律,但由于各结构参数量纲不同,无法比较不同结构参数对同一性能指标的影响显著程度,在具体优化时对于参数值的选取没有科学依据,因此,本文引入相对灵敏度分析方法研究这一问题。
2.4 相对灵敏度分析
参数灵敏度即系统目标函数对某一参数的偏导数,反映了输入参数对系统响应的影响情况。为直观反映各参数对系统响应影响的显著程度,引入有限差分法对相关参数进行灵敏度分析。
设车载底盘后坐跳动的目标函数为:
其中,f(*)为广义函数;bj(j=1,2,…,n)为车载火炮结构参数。
根据有限差分法,使某一设计变量发生一个非常小的摄动Δbj,而其他变量保持不变,此时系统响应的变化量为ΔFj。因此,车载火炮后坐稳定性在bj处的灵敏度可表示为:

当Δbj非常小的条件下,上式可表示为:

若各参数的量纲不同,则灵敏度可表示为:
根据表达式(12)计算各结构参数的灵敏度如表4 所示。

表4 各参数灵敏度
根据仿真与灵敏度分析结果可知,参数h、L1、mh相比于L2、md对车载火炮后坐稳定性的影响更为显著,故可得备选优化参数序列集{h,L1,mh},并以此为研究对象对车载火炮射击稳定性进行优化。
3 车载火炮发射稳定性优化
序列二次规划法是拟牛顿算法在约束优化方法上的推广应用,是目前公认的求解约束非线性优化问题的最有效方法之一,与其他优化算法相比具有收敛性好、计算效率高、边界搜索能力强等优势。
因此,本文以序列二次规划算法为优化方法,对参数h、L2、mh进行优化。通过优化求解可知,当h、L2、mh分别取2 123 mm、3 348.5 mm、1 248.9 kg时,后支撑跳高达到0.832 6 mm 左右(如表5 所示)。下页图16 为优化前后对比。

表5 优化结果对比表
根据仿真优化结果,在对该车载火炮进行结构优化时,通过适当降低火线高、驻锄位置前移或增大后坐部分质量的方式,可以较明显地提高载火炮的射击稳定性。
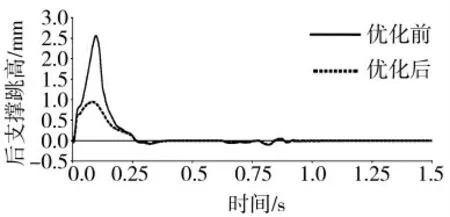
图16 优化前后对比曲线
4 结论
本文通过虚拟样机建模,对某型车载火炮的射击稳定性进行了研究,引入参数相对灵敏度分析获得了影响较为显著的3 个参数,并进行了优化。得出结论如下:
1)通过虚拟样机仿真得到了后支撑跳高随火线高等参数的连续变化规律,为总体把握各参数变化对后支撑跳高的影响提供了理论基础。
2)通过参数相对灵敏度计算,获得备选优化参数序列集{h,L2,mh};通过SQP 方法进行优化,使支撑跳高降低67.42%,优化效果较为明显,凸显了SQP 方法在求解中小型约束非线性优化问题的优越性。
3)车载火炮作为复杂的武器系统,影响射击稳定性与射击精度的因素较多,文中仅选择了火线高等5 个因素进行后坐稳定性分析。若对车载火炮总体匹配性进行分析,仍需考虑各部分质量偏心、液压结构参数、底盘参数及后坐行程等因素的影响,这是下一步工作的研究重点。
猜你喜欢
矿业安全与环保(2022年2期)2022-05-20
北京航空航天大学学报(2021年4期)2021-11-24
航空学报(2020年9期)2020-12-02
房地产导刊(2020年6期)2020-07-25
民用飞机设计与研究(2019年4期)2019-05-21
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28
现代兵器(2017年1期)2017-02-13
现代计算机(2009年5期)2009-08-27
小哥白尼·军事科学画报(2009年8期)2009-08-13
