基于PD控制的仿昆虫扑翼样机研制
2020-12-02 08:32刘晶汪超谢鹏周超英
航空学报 2020年9期
刘晶,汪超,谢鹏,周超英,*
1. 哈尔滨工业大学(深圳)机电工程与自动化学院,深圳 518055 2. 东莞理工学院 机械工程学院,东莞 523000 3. 深圳技术大学 中德智能制造学院,深圳 518118
微型扑翼飞行器(FW-MAV)这一概念最早由美国国防高级研究计划局(DARPA)提出,是一种模仿鸟类及昆虫飞行姿态的新型飞行器。仿鸟微型扑翼飞行器模仿鸟类扑动前飞飞行姿态,相比之下,仿昆虫微型扑翼飞行器飞行方式更加灵活,其模仿昆虫悬停、垂直起飞及侧向飞行姿态,可适应更复杂多障碍环境,具有更广阔应用前景。到目前为止,国内外各大科研机构都已相继对该领域展开了研究,也先后推出了其成功研制的仿昆虫微型扑翼飞行器。
由美国Aero Vironment公司研发的超微型飞行器Nano Hummingbird[1]是世界上第一台可成功实现控制飞行的仿蜂鸟微型扑翼飞行器(蜂鸟飞行方式与昆虫类似),其翼展长16 cm,重19 g,采用全绳传动实现样机扑动,翅翼为柔性翼设计,可悬停飞行及切换到侧飞状态。在DARPA的资助下,哈佛大学Robobees团队开展了仿蜜蜂微型飞行器Robobee[2-5]的研究,并于2008年成功试飞第一款样机,其利用压电结构实现样机扑动,采用刚性翼设计,可悬停及机动飞行。Maryland大学研制了一款重62 g,扑动频率为22 Hz的仿蜂鸟微型扑翼样机Robotic hummingbird FW-MAV[6],扑动机构由曲柄摇杆与曲柄滑块组成,采用柔性翼设计,该样机成功实现6 s悬停飞行。荷兰代尔夫特大学近些年来成功研制了一系列仿昆虫扑翼样机[7-11],其最新一款仿果蝇扑翼飞行器,重28.2 g,翼展33 cm,扑动频率可达17 Hz,采用2个单曲柄双摇杆机构实现样机扑动,翅翼为柔性翼设计,可实现敏捷前飞及悬停飞行。韩国建国大学[12]从仿生学角度出发,研制出了一款重7.36 g,翼展12.5 cm的仿昆虫扑翼飞行器,其扑动机构由曲柄滑块与曲柄摇杆组成,采用柔性翼设计,该飞行器可实现无控垂直起飞。德国FESTO公司于2013年研制了一款仿蜻蜓扑翼飞行器“BionicOpter”[13],其翼展63 cm,重175 g,扑动频率约为20 Hz,可像真实蜻蜓一样飞行、转向及悬停,4个翅膀都可单独控制,具有较高自由度。同时,该公司于2015年研制了一款仿蝴蝶扑翼飞行器“eMotionButterflies”[14],其翼展50 cm,重32 g,借助外部红外摄像机及机身上的2个红外LED灯,可实现3~4 min飞行。美国乔治亚理工学院联合剑桥大学研制了一款仿昆虫机器人“Entomopter”[15],其拥有2对类似于蝴蝶的翅膀,长25.4 cm,由往复式化学肌肉提供动力形成翅翼扑动运动。
目前,仿昆虫微型扑翼样机研究领域仍有许多问题亟需解决,其中较为关键的有扑动机构设计、翅翼设计及姿态控制。在本文中,考虑到已有样机扑动方案存在高摩擦、加工装配复杂、不易改变扑动幅值等问题,选取结合了曲柄摇杆与滑轮的机构作为样机扑动方案,其突出特点为低摩擦性、机构原理简单、加工装配方便及可通过改变滑轮间传动比灵活改变样机扑动幅度。在综合已有的样机翅翼研究成果基础上,扑动效率更高的负扭转翼被选定为样机翅翼。考虑到当前已有姿态调节机制存在增加机构复杂度问题,采用了一种基于翅翼扭转的姿态调节机制,该机制实现简单,控制灵活,并据此设计了相关机构。最终成功研制了一款翼展18 cm,重23.8 g,扑动幅值为180°,扑动频率可达22 Hz的仿昆虫扑翼样机。相关升力及姿态力矩测量实验验证了样机气动性能及姿态调节机制的可行性。为快速实现样机控制,选取了适应性较强的PD(Proportional Differential)控制律作为样机控制方式,为解决参数调定耗时及样机试飞调定效果不易观察问题,将调定过程分为两步进行,首先搭建了姿态调节平台,通过该平台观察了调定效果及快速获取了初始控制参数,在样机已有一定控制能力基础上,试飞样机,观察飞行效果并调定了参数,最终实现了样机稳定垂直起飞。
1 扑翼样机整体结构设计
稳定的样机飞行平台是对仿昆虫微型扑翼飞行器进行深入研究的基础,本节为样机的整体结构设计,主要包括:扑动机构设计、翅翼设计及姿态调节机构设计。
1.1 扑动机构设计
扑动机构设计是成功研制样机的关键,也是样机整体结构设计的第一步。为实现昆虫大幅值扑动[16-17](约180°),各仿昆虫扑翼样机研究机构都提出了自己的样机扑动方案[1, 6, 12, 18-19],为解决传统样机扑动机构(曲柄摇杆机构)扑动幅值范围有限问题,大部分方案都是在传统扑动机构基础上通过结合其余机构实现大幅值扑动,例如曲柄滑块结合双摇杆、曲柄滑块结合齿轮齿条等,这些方案虽然都实现了大幅值扑动,但存在机构复杂、扑动摩擦力大及不易加工与装配等问题,综合以上分析,最终所确定样机扑动方案如图1所示,该方案原理简单、加工装配方便,只需改变大小滑轮传动比便可实现样机扑动,该方案受Nano Hummingbird及韩国建国大学的KUBeetle[20]样机扑动方案启发。
图1所示为曲柄摇杆机构与滑轮机构所组成的机构原理图,其中P1P0P3P2和P0P′1P′2P3分别为摇杆运动极限状态,a为曲柄,其固定于减速系统最后一级齿轮,将电机转动运动形式通过连杆b传递给摇杆c,形成样机扑动运动。摇杆c固定于大滑轮,大小滑轮之间通过细绳连接,形成滑轮之间带传动。为使样机稳定飞行,样机上下扑动应对称,即应满足βmax=βmin。同时,为保证两端输出杆扑动形式对称,控制某一端大小滑轮之间传动绳在连接之前反转180°,如图所示。为方便设计机构尺寸,在确定机构尺寸大小时,c、d及摇杆输出角β被设置为输入参数
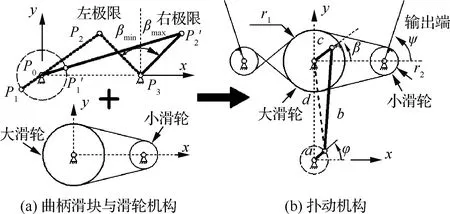
图1 扑动机构原理图Fig.1 Schematic of flapping mechanism
。
根据余弦定理,曲柄a及连杆b长度可以表示为
(1)
(2)

摇杆输出角β可定义为
(3)
式中:F、M及W定义为
(4)
(5)
(6)
式中:φ为曲柄输入角,如图1(b)所示。
输出端扑动角ψ可定义为
(7)
式中:r1和r2分别为大滑轮半径和小滑轮半径。
为加工装配方便,选取二级直齿圆柱齿轮系统作为样机减速系统,齿轮减速比为16.2。为使扑动频率尽可能大,选取空心杯电机作为样机驱动电机。最终得如图2所示样机扑动机构。
该扑动机构重3.7 g,扑动幅度设计为180°,为减轻机身重量,前后两面机架板及连杆由碳纤维板切割而成,大小滑轮通过光敏树脂3D打印完成,滑轮间通过普通棉绳传动。
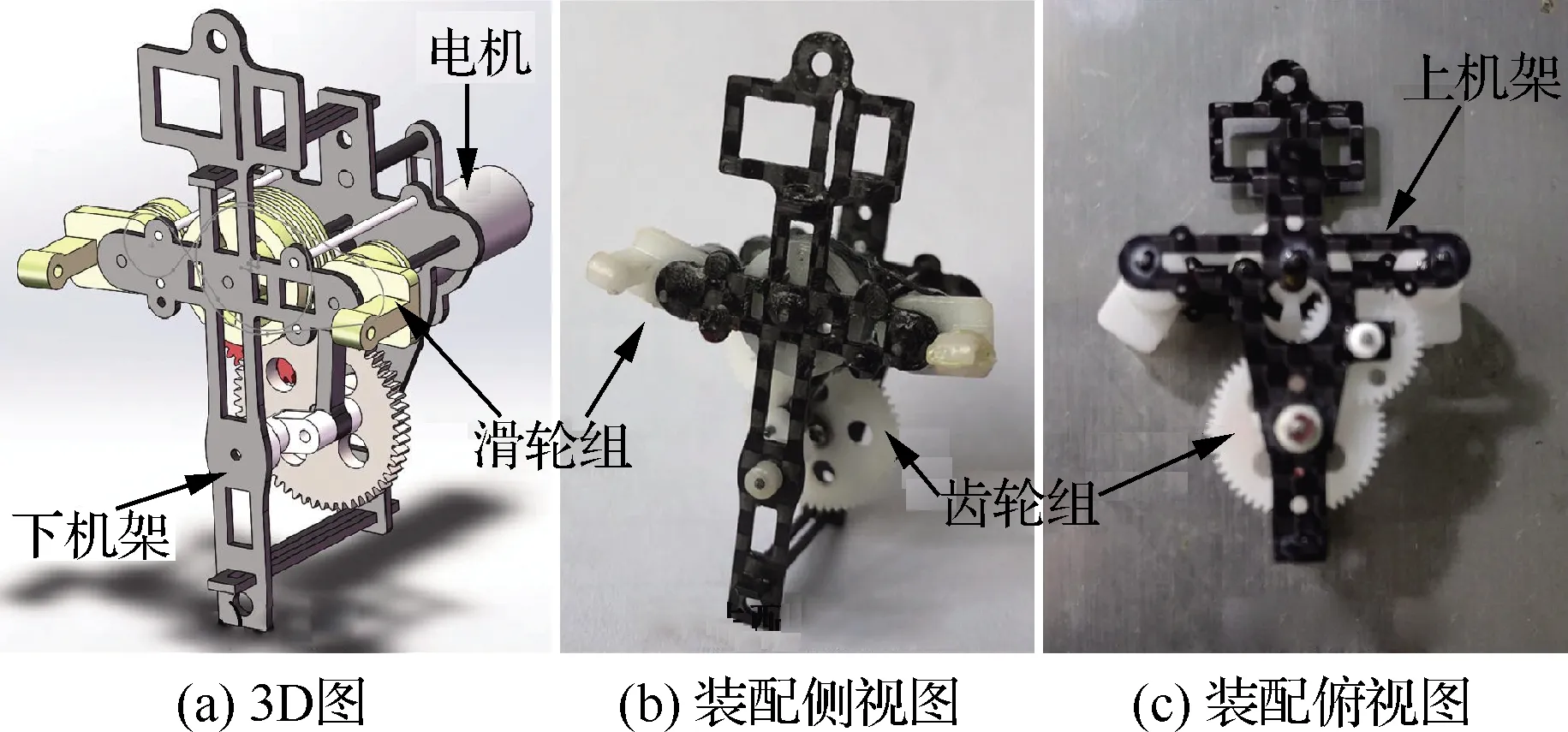
图2 样机扑动机构Fig.2 Flapping mechanism of vehicle
1.2 翅翼设计
国内外实验研究已经表明,相比于刚性翼,柔性翼扑动时,其弦向及展向存在一定变形,可产生更大升力及推力,具有更高气动性能[21-24]。例如密西根大学的Wei Shyy通过数值模拟研究发现,相比于刚性翼,由于柔性翅翼存在被动扭转,在扑动过程中反而可以消除涡流对翅翼的负面影响,起到增强翅翼气动性能作用;哈佛大学的研究学者通过人工加强熊蜂的翅翼刚度发现,在扑动幅度与扑动频率不变的情况下,熊蜂的气动升力会有所下降。
图3所示翼型称为负扭转柔性翼型[25],其已被成功应用于Nano Hummingbird、hummingbird-sized FW-MAV[26]及KUBeetle等微型扑翼样机中。其中,Robotic hummingbird FW-MAV研究团队在研究翅翼过程中发现使翅翼面与垂直方向存有一定倾角可显著增大翅翼升力。KUBeetle[27-29]研究团队采用非定常叶素理论,同时考虑样机功率负载因素,通过与平面翼(迎角从翼根到翼尖不变)比较发现该种翅翼类型扑动效率更高。
因此,在综合早期学者已有研究成果基础上,本课题采用了负扭转柔性翅翼设计,图3所示即为本课题所设计样机翅翼。该翅翼单边翼展80 mm,平均弦长35 mm。为减小翅翼扑动惯性力,采用厚度为0.012 5 mm PET(聚酯薄膜)加工完成,该种材料密度低、强度高及使用寿命长。为增强翼面刚度,每个翼面被粘覆4根直径为0.25 mm 细小碳棒。为保证翅翼安装进入样机之后翼面能够与垂直方向形成一定倾角,翼根向外伸出,并与扑动轴形成一定角度,设计翅翼参数时,选定σ=15°,使得翅翼安装进入样机之后,有一定自然倾角。为便于前缘杆与翼根杆装入及保证翅翼灵活扑动变形,增强翅翼气动性能,使翅翼面翅翼前缘处与翅翼根部处卷曲,形成一通孔,如图3所示。
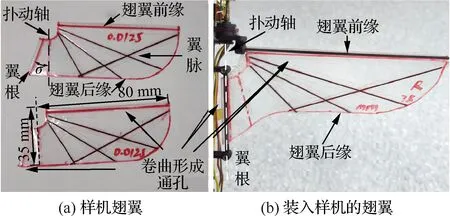
图3 样机翼型Fig.3 Airfoil of prototype
1.3 姿态调节机构设计
本文所研究扑翼样机为无尾翼扑翼飞行器,若需控制扑翼样机稳定飞行,则唯一可行方案为模仿昆虫姿态力矩产生机制,即通过样机翅翼产生俯仰姿态及滚转姿态控制力矩。目前,常用的一些姿态调节机制有基于改变扑动平面与水平面夹角的机制[6]及基于使左右及上下扑动产生幅值或速度差异的机制[5,11]或同时混合使用以上所介绍机制,但这些机制都存在增加了机构复杂度问题,因此,为在不增加机构复杂度前提下实现姿态调节,研究中采用了基于翅翼扭转的姿态调节机制[1,20],该机制只需控制翅翼根部转动即可实现姿态调节,简单、易行,如图4所示。
图4(a)及图4(b)所示为俯仰姿态控制机制。
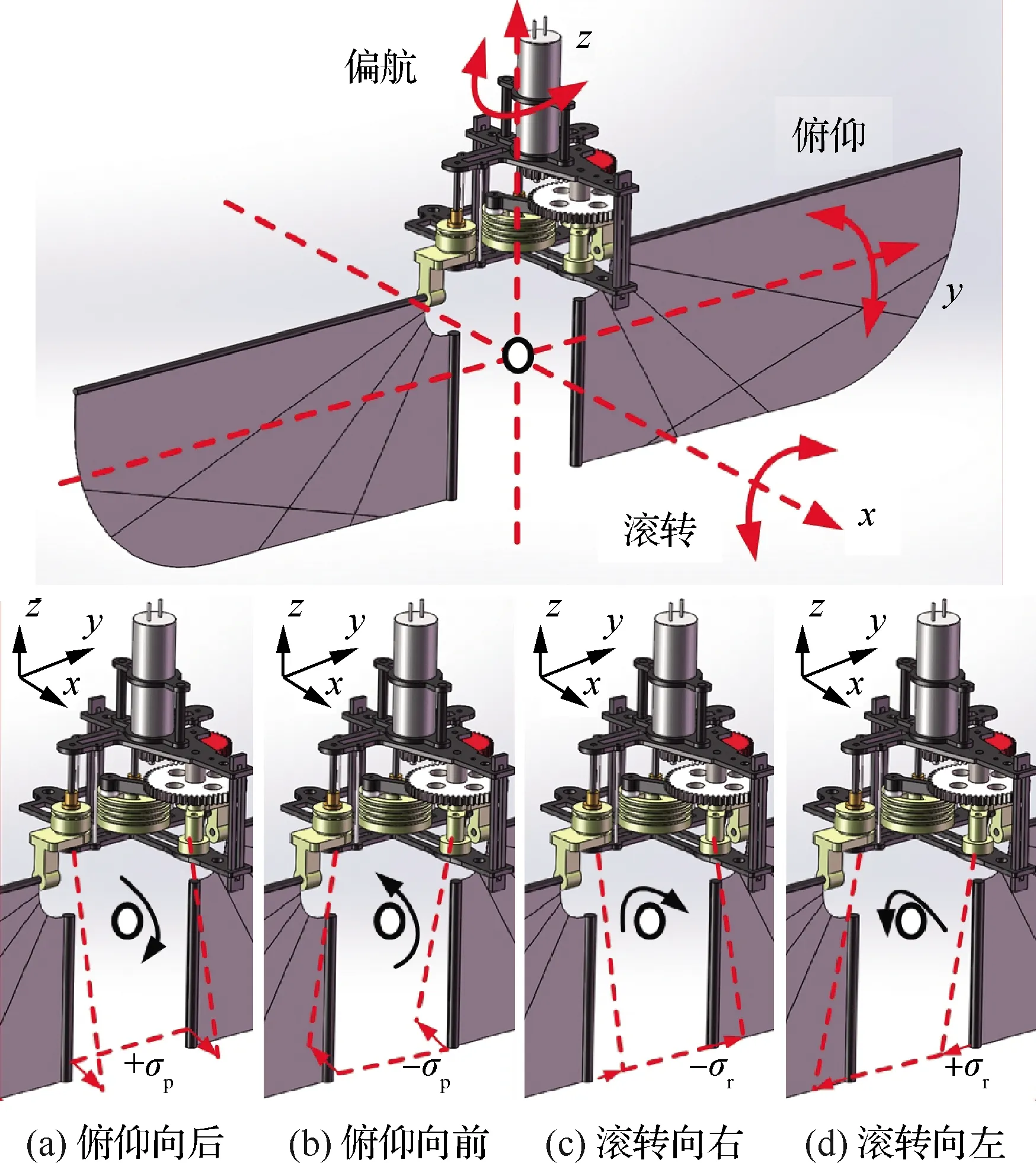
图4 样机姿态调节机制Fig.4 Attitude adjustment mechanism of vehicle
图4(a)所示为:若需控制样机后飞,可通过控制左右翅翼同时绕y轴旋转一定角度+σp,产生俯仰后飞力矩。图4(b)所示为:若需控制样机前飞,可通过控制左右翅翼同时绕y轴旋转一相反角度-σp,产生俯仰前飞力矩。
图4(c)及图4(d)所示为滚转姿态控制机制。图4(c)所示为:若需控制样机右飞,可通过控制左右翅翼同时绕x轴旋转一定角度-σr,产生滚转右飞力矩。图4(d)所示为:若需控制样机左飞,可通过控制左右翅翼同时绕x轴旋转一相反角度+σr,产生滚转左飞力矩。
理论上讲,如果合理控制扑翼飞行器俯仰及滚转力矩,样机则可以实现稳定垂直起飞、悬停等飞行姿态。偏航力矩的存在只是使得扑翼样机绕z轴旋转,同时考虑到增加偏航力矩调节机构会使得样机结构复杂,机身过重,可能无法成功起飞,故本扑翼飞行器暂不考虑偏航力矩。
根据以上姿态调节机制,利用三维制图软件设计姿态调节机构,如图5所示。图5(a)所示为俯仰姿态控制机构设计图,图中所示A、B、C、D4点组成一四连杆机构,俯仰舵机通过该四连杆机构与翼根连接杆相连,翼根连接杆连接两端翅翼根部,如此当舵机转动时,可控制左右翅翼平面绕y轴转动,达到样机俯仰控制。图5(c)所示为滚转姿态控制机构设计图,图中所示E、F、G、H四点组成一平行四边形机构,滚转舵机通过舵盘直接与翼根连接杆相连,如此当滚转舵机转动时,可带动左右翅翼绕x轴同方向转动,产生滚转姿态控制力矩。
至此,扑翼样机扑动机构设计、翅翼设计及姿态调节机构设计都已全部设计完成。经加工装配得如图6所示微型扑翼飞行器,其翼展18 cm,重17 g,扑动幅值可达180°。
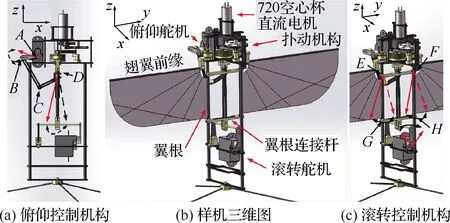
图5 扑翼样机三维图Fig.5 FW-MAV designed by 3D modeling software

图6 扑翼样机Fig.6 Flapping wing micro air vehicle
2 扑翼样机升力及姿态力矩测量
第1节内容中,已获得一稳定飞行平台,在搭建控制系统实现样机稳定飞行之前,需进行相关测量实验验证其姿态调节机制可行性及判断翅翼是否可提供足够升力。测量平台如图7所示。
实验平台由深圳鑫立XX-1-30V150A外部直流电源、PC机、NI USB-6210数据采集卡、舵机控制器、Nano17Ti SI-8-0.05六轴力矩传感器及扑翼样机组成。
本课题的研究目标是研制一款可实现垂直起飞及稳定悬停飞行的扑翼样机,对于实际飞行过程中,空气来流对于翅翼所产生姿态力矩及升力的影响,本课题暂不考虑。
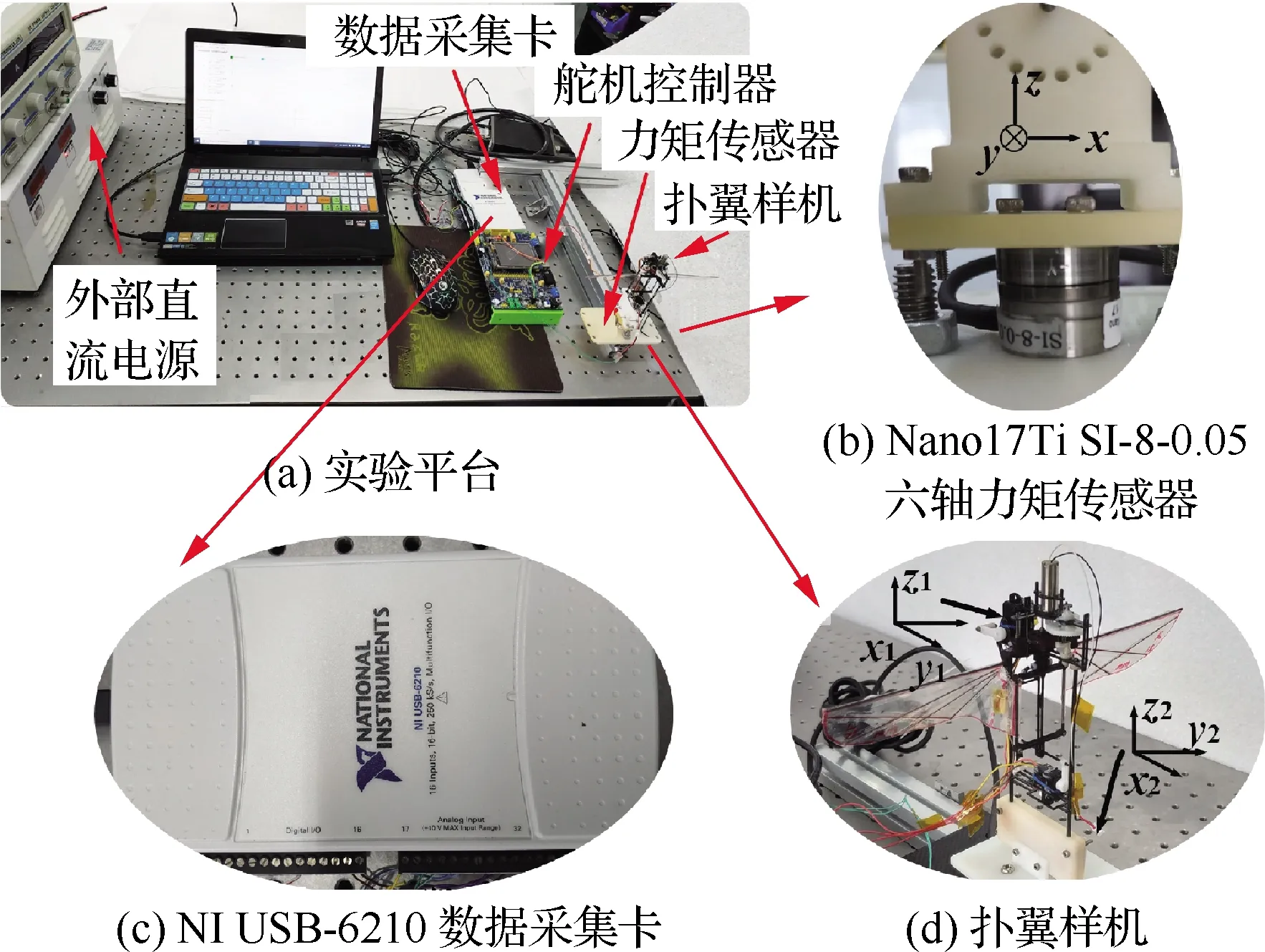
图7 升力及姿态力矩测量平台Fig.7 Platform of lift and attitude torque measurement
2.1 姿态力矩测量
首先进行姿态力矩测定,固定样机扑动频率为12 Hz,将所测得周期性数据采用线性最小二乘算法滤波后求取平均值,并作为每次实验结果值。俯仰及滚转角度变化范围均为:-10°、-5°、0°、+5°、+10°(样机坐标与图4所定义样机坐标一致)。结果如图8所示,Tx、Ty、Tz分别为x、y、z轴的力矩。
图8(a)所示为俯仰姿态下三轴力矩曲线,图8(b) 所示为滚转姿态下三轴力矩曲线,由图可知,当偏转角由-10°变化至+10°时,俯仰力矩及滚转力矩都呈线性规律变化,其余轴虽然也产生一定量力矩,但无变化趋势。
由实验结果可得,样机翅翼产生了预期姿态力矩,对称偏转位置力矩也大致相等,方向与姿态调节机制内容中所分析结果一致,由此也验证了1.3节内容中所提出姿态调节机制可行性。

图8 俯仰和滚转姿态下三轴力矩曲线Fig.8 Torque curves of three axes with pitch and roll attitude
2.2 样机升力测量
在已确定样机姿态调节机制可行性基础上,为保证样机搭载传感器等器件之后能够顺利起飞,以达到飞行控制目的,需要测定样机升力。姿态力矩测量实验中所采用传感器量程有限,在频率大于14 Hz时会发生数据错误,更换为SRI M3813A六轴力矩传感器。最终升力测定情况如图9所示。
所测量频率有:5 Hz、11 Hz、14 Hz、17 Hz、19 Hz、21 Hz及22 Hz,由于扑动频率超过22 Hz之后,样机齿轮及电机易损坏,无法获得真实升力数据,所以未能测定。由图9可得,其最大可提供25.8 g升力,已知样机重17 g,预计额外的控制系统重量最大为6 g,可得翅翼可为样机提供足够升力。
图10所示为俯仰姿态下气动升力变化情况,图11所示为滚转姿态下气动升力变化情况,2次实验中都分别测定了样机在11 Hz、14 Hz、17 Hz及19 Hz扑动频率下,在偏转角为-10°、-5°、0°、+5°、+10°情况下的样机升力大小,由图10和图11可得,样机确实存在一定升力损失,但大体损失不大,最大约为1 g,若使得样机最大扑动频率为22 Hz,保守估计应控制机身重量在23.8 g以下。

图9 样机升力曲线Fig.9 Lift curves of vehicle

图10 俯仰姿态下样机升力曲线Fig.10 Lift curves of vehicle with pitch attitude

图11 滚转姿态下样机升力曲线Fig.11 Lift curves of vehicle with roll attitude
3 扑翼样机姿态控制
前文通过提出相关扑动方案及姿态调节机制,已获得微型扑翼飞行器。同时,通过力矩测量实验,证明了其姿态调节机制可行性,通过升力测量实验,证明了翅翼可为样机飞行提供足够升力。本节为扑翼样机的姿态控制研究,主要包括:控制系统设计、样机姿态调节及样机试飞。
3.1 控制系统设计
样机姿态调节控制的首要任务是搭建样机控制系统,为快速实现样机控制,选定适应性强、控制简单的PID(Proportion Integral Differential)控制律作为样机控制方式,同时考虑到样机控制属于实时性较强控制场景,引入微分环节容易导致饱和,最终确定控制方式为PD控制,图12所示为扑翼样机控制原理。连续系统中的PD控制律控制方程为
(8)
式中:U(t)为控制器输出;err(t)为设定值与实际值之差;Kp为比例系数;Kd为微分系数。
设定err(k)为时刻k所对应采样值,采样周期为T,以一阶后向差分近似代替微分,则PD控制律的离散化方程为
U(k)=Kp×err(k)+Kd×(err(k)-err(k-1))
(9)
至此,已得到样机姿态控制方程,后续可据此编写样机姿态控制程序,通过调定Kp、Kd两个参数,达到控制样机稳定飞行目的。
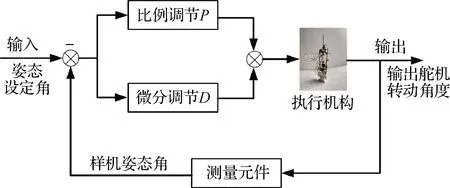
图12 样机控制原理Fig.12 Principle of vehicle control
在搭建样机控制系统电路时,选定Arduino pro mini作为样机微控制器;选定内部集成了姿态解算器及动态卡尔曼滤波算法的MPU6050传感器作为姿态传感器,可直接输出姿态角;舵机采用杜曼超微型舵机DM-S0020;无线传输模块采用NRF24L01+迷你无线传输模块,用于传输样机姿态。搭载了控制系统的扑翼样机最终重23.8 g,扑动频率可达22 Hz。
3.2 样机姿态调节
由PD控制律离散化方程可知,采用PD控制方式的关键是获取Kp及Kd两个控制参数。工程应用中常采用工程整定法获取PD控制方程控制参数,常见的工程整定法有:经验法、临界比例度法、衰减曲线法及反应曲线法。使用后3种方法需要对系统施加相应作用并观察样机反应曲线,记录相关数据以用于计算控制参数,实际样机调节中,难以实现相应作用的施加,相关状态也不易观察记录,且得到的参数仍需采用经验法调整,故研究中直接采用经验法获取控制参数。
但考虑到采用经验法获取控制参数非常耗时及直接试飞样机调定参数不易观察控制效果,为此,将参数调定过程分为2步,首先搭建姿态调节平台,用于直观观察控制效果及获取样机初始控制参数,基于此参数,进行样机试飞实验,再经调定,最终获取合理样机控制参数。如此,可简单及快速地实现样机飞行控制。图13所示为样机姿态调节平台,该平台底座通过3D打印完成,为减轻平台对样机影响,十字框架采用碳纤维板切割完成,所有转动连接处采用轴承连接。
样机姿态调节过程分为3步,先俯仰调节,再滚转调节,最后整体调节。图14所示为最终俯仰和滚转调节情况。

图13 姿态调节平台Fig.13 Platform of attitude adjustment
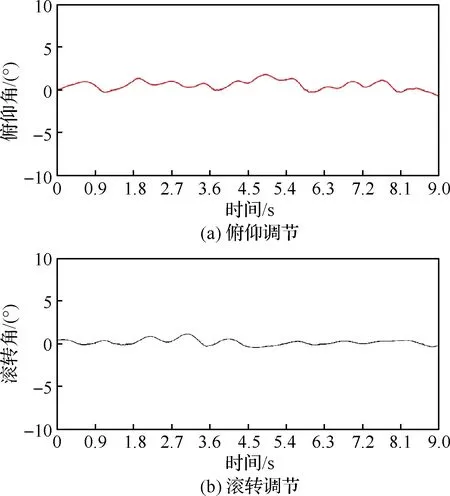
图14 俯仰和滚转调节曲线Fig.14 Curves of pitch roll and adjustment
由图14(a)可知,单纯俯仰调节下,样机自身姿态可以稳定在±2°范围内;由图14(b)可知,单纯滚转调节下,样机自身姿态可以稳定在±1.5°范围内。总体来说,机身姿态较为稳定,达到了一定控制效果,其中,俯仰控制参数为:Kp=1,Kd=0.5;滚转控制参数为:Kp=1,Kd=0.4。
进一步实验结果表明,在使用单方向调节所获取控制参数进行整体调节时,样机已可表现出良好控制特性,整体姿态维持在±2°范围内,控制效果较为良好,可为下一步样机试飞实验提供良好初始控制参数。则最终所确定样机初始控制参数为:俯仰方向:Kp=1,Kd=0.5;滚转方向:Kp=1,Kd=0.4。随机采集的4幅整体调节姿态曲线变化情况如图15所示。
3.3 样机试飞实验
在姿态调节实验中,通过搭建姿态调节平台,已初步获取姿态控制参数,但姿态调节平台系统与微型扑翼样机系统之间存在差异,并不能保证初步获取控制参数完全适用于微型扑翼样机系统,需要进一步通过飞行试飞实验,观察飞行效果,调定控制参数,可获取最终控制参数。
样机参数调定过程为:利用相机拍摄样机飞行过程,观察俯仰及滚转方向反应效果,若反应过快,则减小该系数,若反应过慢,则增大该系数。由于比例系数对样机控制反应起主要效果,所以调定过程中主要对比例系数进行调定。最终,历经多次调试飞行,样机可较为稳定垂直起飞,最终所得控制参数为:俯仰方向,Kp=5,Kd=0.5;滚转方向,Kp=4,Kd=0.4。样机2次起飞情况如图16及图17所示。
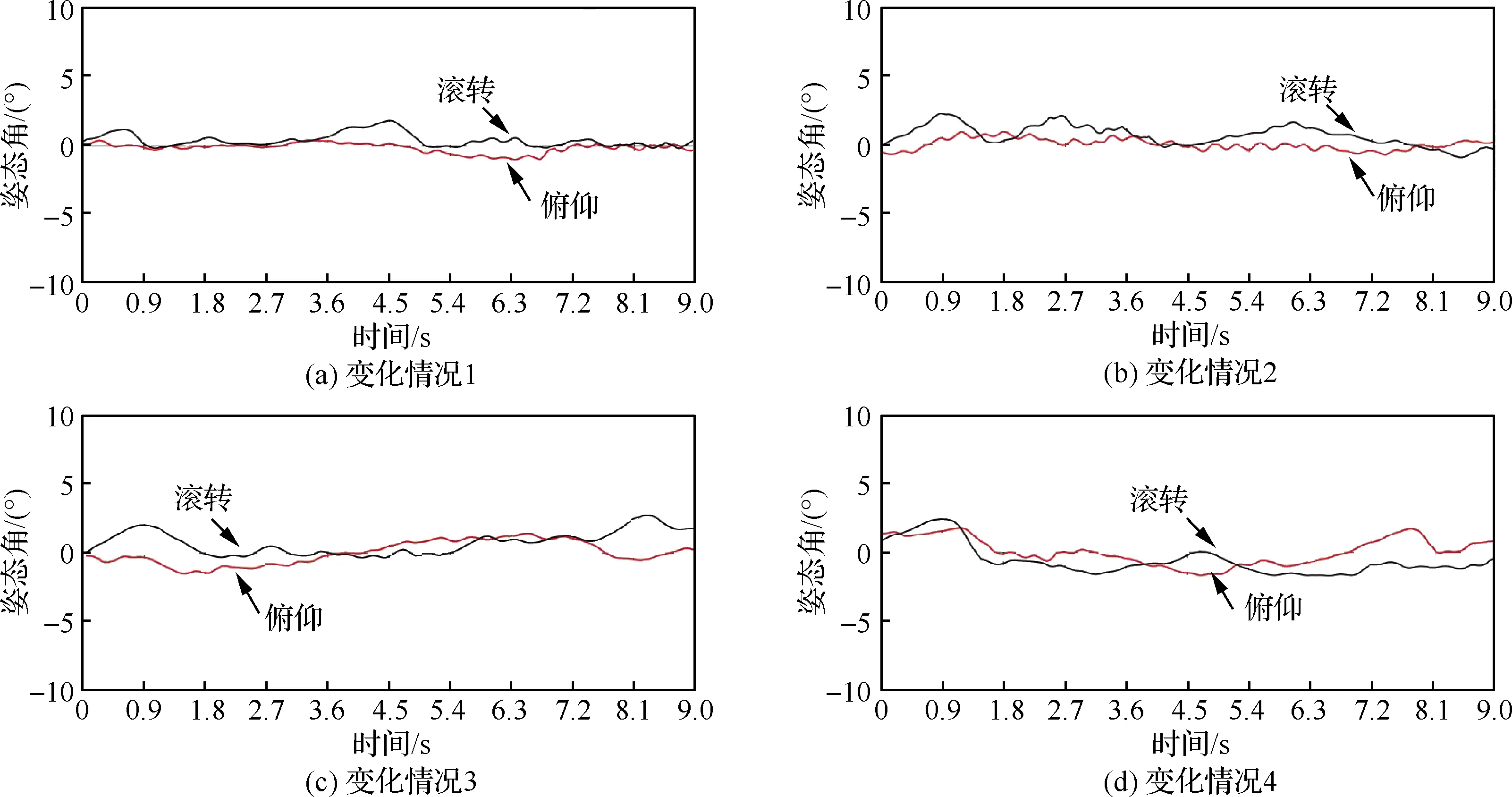
图15 整体调节曲线Fig.15 Curves of overall adjustment
在无控制作用情况下,垂直起飞类扑翼样机飞行姿态非常不稳定,本文所介绍扑翼样机的稳定垂直起飞表明,当采用PID控制律用于样机控制飞行时,将简单易行的经验法结合“先平台调定,再试飞调定”的参数调定方式可快速实现扑翼样机控制飞行,对于该类样机姿态控制飞行研究具有一定的参考价值。

图16 第1次样机垂直起飞实验Fig.16 The first vertical takeoff test of vehicle

图17 第2次样机垂直起飞实验Fig.17 The second vertical takeoff test of vehicle
4 结 论
本文介绍了一款仿昆虫微型扑翼样机的设计内容,通过提出相关样机扑动方案及姿态调节机制,测定升力与姿态力矩及设计样机控制系统,最终实现了样机稳定垂直起飞。主要结论如下:
1) 选定了由曲柄摇杆与滑轮组成的复合机构作为样机扑动方案,该方案良好解决了已有样机扑动方案存在的高摩擦、结构复杂及不易加工装配问题,并可灵活改变样机扑动幅值。在综合已有扑翼样机翅翼研究成果基础上,扑动效率更高的柔性扭转翼型被选定为样机翅翼。考虑到已有样机姿态调节机制存在增加机构复杂度问题,采用了基于翅翼扭转的样机姿态调节机制,该机制实现简单,控制方便,并设计了相关机构。最终,成功研制了一款重23.8 g,翼展为18 cm,扑动幅值可达180°,扑动频率可达22 Hz的仿昆虫微型扑翼飞行器。
2) 样机气动升力测量结果表明,样机翅翼在22 Hz扑动频率下,可产生25.8 g升力。样机姿态力矩测量结果表明,翅翼可产生预期姿态力矩,所提出姿态调节机制具有可行性。通过测量姿态调节情况下的气动升力,结果发现样机有最大约1 g气动力损失,若使得扑动频率最大为22 Hz,样机重量应控制在24.8 g以下。
3) 为快速实现样机控制,适应性较强的PD控制律被选定为样机飞行控制方式。同时,为克服直接试飞样机调定参数不易观察飞控效果及解决采用经验法调定参数耗时问题,参数调定过程分为两步进行,首先搭建了姿态调节平台,用于直观观察控制效果及获取样机初始控制参数;基于此参数,进行样机试飞实验,再经调定,最终获取到了合理样机控制参数,并成功实现样机稳定垂直起飞,也同时证明该种参数调定方式适合推广用于该类垂直起飞样机姿态控制研究。
猜你喜欢
机床与液压(2022年6期)2022-09-16
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
世界博览(2017年1期)2017-04-19
科技与创新(2017年3期)2017-03-17
科技视界(2016年27期)2017-03-14
阅读与作文(小学低年级版)(2016年8期)2016-09-21
城市建设理论研究(2014年11期)2014-04-21
诗潮(2009年11期)2009-11-24