
A carrier frequency traction method of dynamic BeiDou signal based on half-millisecond integration
2020-01-07 08:20:08HANYongqiangWANGNanFENGShuangjiZHANGYanshunCHENJiabin
中国惯性技术学报 2019年5期
HAN Yongqiang,WANG Nan,FENG Shuangji,ZHANG Yanshun,CHEN Jiabin
(1.School of Automation,Beijing Institute of Technology,Beijing 100081,China;2.School of Instrumentation and Optoelectronic Engineering,Beihang University,Beijing 100191,China)
Abstract:In view of the problem that the frequency-lock loop is subject to frequent data transitions of BeiDou signal,which results in narrow frequency pull-in range and causes unlocking the signal tracking loop easily under dynamic situations,a carrier frequency traction method of dynamic BeiDou signal based on half-millisecond integration is proposed.Every millisecond the frequency-lock loop updates,and two adjacent pre-detection integration value pairs of half millisecond are extracted within the same data bit interval,and are discriminated by the four-quadrant arctangent discriminator to estimate the local carrier frequency error.Then,the error is filtered and used to control the numerically controlled oscillator to produce the corresponding local carrier and realize the carrier frequency traction with a wide pull-in range.Based on the dynamic BeiDou B3I signal,the results of actual vehicle experiment and high dynamic simulation indicate that the proposed method can not only eliminate the effect of data transitions on frequency lock loop,but also expand the pull-in range of carrier frequency traction to about four times of the traditional method (The dynamic sports car experiments verify its effectiveness at 872.5Hz).Furthermore,the low complexity of the proposed method makes it easy to be applied in actual engineering scenes.
Key words:dynamic BeiDou signal; carrier frequency traction; data transitions; half-millisecond integration
Global Satellite Navigation System (GNSS) has been widely applied in mapping,transportation,urban monitoring and other fields,in which the positioning error does not accumulate over time[1-3].The accurate tracking of the incoming carrier plays a key role in getting the signal tracking loop locked in GNSS receiver[4-7].The carrier phase is usually tracked directly by phase lock loop (PLL) in static environments.However,affected by the user motion parameters under dynamic situations,the Doppler frequency of incoming carrier increases and even a large carrier Doppler frequency rate-of-change exists[8].As a result,the frequency error between the local carrier and the incoming carrier tends to exceed the dynamic region of PLL easily,which causes the signal loop to lose track.To avoid this,the frequency lock loop (FLL) is usually used to carry out the carrier frequency traction,so that the PLL is able to track the carrier phase successfully.
As an important part of FLL,the frequency discriminator has a radical impact on the performance of carrier frequency traction[9].Because of the wide frequency pull-in range,and the output is linear with the true input frequency error,the four-quadrant arctangent(Atan2) discriminator has been widely applied in dynamic GPS receivers[10].Nevertheless,aimed at the BeiDou signal modulated with Neumann-Hoffman (NH) code,the frequent data transitions exist in the predetection integrators of FLL,which causes Atan2 discriminator to output incorrect frequency error estimates with a high probability,the carrier loop to lose track[11].
Based on this circumstance,the reference [12]applies the cross-product automatic frequency control loop,which is insensitive to the data transitions,to complete the carrier frequency traction,but the narrow frequency pull-in range limits its application in dynamic scenes.In addition,the reference [13]uses the average of some consecutive frequency errors outputted from the Atan2 discriminator to achieve the frequency traction,which eliminates the effect of data transitions to some extent.Furthermore,the reference [14]not only improves the initial estimation accuracy of local carrier frequency by refining the acquisition grid,but also employs the twoquadrant arctangent (Atan) discriminator that tolerates the presence of data transitions,to compute the frequency error.However,the Atan discriminator has narrow frequency pull-in range,and the great number of bins in the acquisition grid brings about long acquisition execution time,which results in an increased likelihood that the receiver will lose lock in high dynamic environments.As a consequence,aimed at the dynamic compass signal,it is necessary to explore a carrier frequency traction method which can overcome the effect of data transitions and guarantee a wide frequency pull-in range.
According to the researches presented above,this paper first analyzes the mechanism of signal loop losing track during the carrier frequency traction,caused by incorrect frequency error estimations out- putted from the frequency discriminator in FLL which is subject to data transitions.Then,aimed at the latest public B3I signal of BeiDou Navigation Satellite System,a carrier frequency traction method based on half-milli- second integration is proposed and analyzed theoretically.Finally,the applicability of the proposed method for dynamic BeiDou signal is verified by actual vehicle experiment and high dynamic simulation.
1 The carrier frequency traction principle
In the FLL of GNSS receiver,the frequency error estimates between the local carrier and the incoming carrier are first computed by a frequency discriminator.Then,these estimates are filtered by a carrier loop filter and used to control the carrier numerically controlled oscillator (NCO) to produce the local replica carrier,which conducts the carrier frequency traction.Finally,the carrier frequency synchronization is achieved after continuous loop feedbacks.As an important part of FLL,the frequency discriminator has great impact on the performance of carrier frequency traction.
During the process of carrier frequency traction,the outputs of two prompt correlators in the in-phase (I) and quadrature (Q) branches of FLL are assumedIP(n) andQP(n) at epochn,which generates the phasorrP(n)=IP(n) + jQP(n),and the phase error between the local carrier and incoming carrier isφ(n).Correspondingly,the phasor and phase error at epochn-1 are expressed asrP(n-1) andφ(n-1) respectively.Fig.1 illustrates the phase change ofΔφbetween two adjacent sampling pointsIPandQPat epochsnandn-1.
As depicted in Fig.1,the frequency error outputted from the frequency discriminator can be estimated from the phase variation per integration interval.

Where the time interval between two adjacent epochs is described byt(n) -t(n- 1),which is equal to the predetection integration timeTcoh.In practice,the frequency error Δfdenotes the difference between the local replica carrier frequency computed at epochn-1 and the incoming carrier frequency received at epochn.
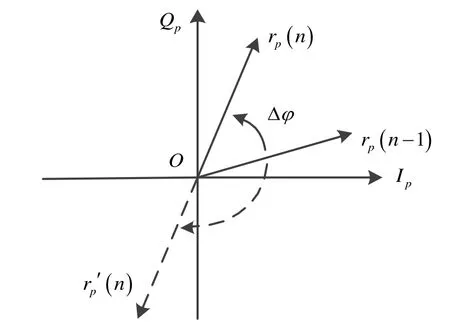
Fig.1 I/ Q phasor diagram depicting true carrier frequency error
Equation (1) requires that the adjacent predetection integration timet(n) andt(n- 1),in which the carrier phaseφ(n) andφ(n-1) are computed,should not straddle the data transitions.If so,the carrier phase variation Δφis completely determined by the carrier frequency error Δfin the signal tracking loop.Besides,the Δφalso denotes the angle that the phasorrP(n-1) rotates to the phasorrP(n).On the contrary,if the data transitions exist in the adjacent predetection integration time,the phasorrP(n) will be inverted to the phasorrP′ (n) shown in Fig.1.Then,the carrier phase variation Δφis not only dominated by carrier frequency error,but also contains a 180° phase change caused by data transitions.As a result,the frequency discriminator will output incorrect frequency errors which cause the signal loop to lose track easily.
2 A carrier frequency traction method based on half-millisecond integration
2.1 The characteristics of BeiDou B3I signal
According to the Interface Control Document (ICD)of the latest public BeiDou B3I signal,the rate of BeiDou D1 navigation message is 50 bps,but it is modulated with the 1000 bps NH code,which leads the data transitions may occur once per millisecond in the predetection integrators of FLL[15].Besides,the rate of BeiDou D2 navigation message is 500bps.Consequently,the BeiDou navigation massage with high rate results in frequent data transitions,which increases the probability of incorrect frequency errors estimated by frequency discriminator of FLL.Then,the BeiDou signal tracking loop will lose lock more easily.
Since the data bit boundary of the navigation message is aligned with the C/A code boundary when BeiDou satellites broadcast signals,once acquisition is completed,the start point of C/A code sequence is found.Besides,the period of C/A code in BeiDou B3I signal is 1 ms,and as previously analyzed,the data transitions of BeiDou navigation message may occur once per millisecond.Fig.2 presents that a simplified illustration of data transitions exists in BeiDou B3I signal,and the data bit denotes the D1 navigation message modulated with the NH code.
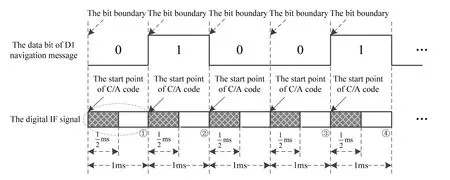
Fig.2 Data transition diagram of BeiDou B3I signal
The carrier tracking loop of the GNSS receiver is generally updated once per millisecond under dynamic situations[14].During the process of carrier frequency traction happens every millisecond,the traditional Atan2 discriminator usually employs two adjacent predetection integration value (I/Q) pairs of one-millisecond to produce an estimate of the frequency error[12,15].However,the data transitions exist during the adjacent predetection integration time at positions ① to ④ presented in Fig.2,which seriously affects the correctness of the frequency error estimations.If the two adjacent predetection integration value (I/Q) pairs of half millisecond are extracted within the same data bit interval,as shown in the dotted box of Fig.2,and discriminated by Atan2 discriminator to compute an estimate of the frequency error,the effect of frequent data transitions on the FLL can be effectively avoided.
2.2 The novel carrier frequency traction method
Aimed at the BeiDou B3I signal under dynamic situations,a novel carrier frequency traction method based on half-millisecond integration is proposed in this paper.Every millisecond the FLL updates,two sets of correlation integral value of half millisecond are firstly extracted within the same data bit interval.Then,the Atan2 discriminator is applied to produce an estimate of the carrier frequency error through these predetection integration value pairs.In the end,this estimate is filtered by a carrier loop filter and used to control the carrier NCO to produce the corresponding local replica carrier,which realizes a wide pull-in range of carrier frequency traction.A simplified block diagram of this operation is depicted in Fig.3.
Based on Fig.3,every millisecond the BeiDou receiver conducts the carrier frequency traction,the digital Intermediate Frequency (IF) data of one millisecond is read from the start point of the local replica C/A code sequence,and down-converted to the zero IF data after mixed with local replica I/Q carrier of one millisecond outputted from carrier NCO.Besides,the local prompt replica C/A code sequence of one millisecond is divided into two parts (first half and second half illustrated in Fig.3),and integrated and dumped separately with the zero IF data that is correspondingly divided into two parts.Then,two adjacent predetection integration value (I/Q) pairs of half-millisecond within the same data bit interval are computed as follow:
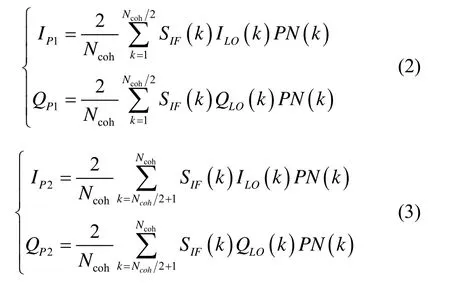
wherePNrepresents the C/A code sequence of one millisecond.SIFis the digital IF data of BeiDou B3I signal.Ncohdenotes the number of samples in theSIFof one millisecond.The local replica carriers of in-phase and quadrature branches are described byILOandrespectively.
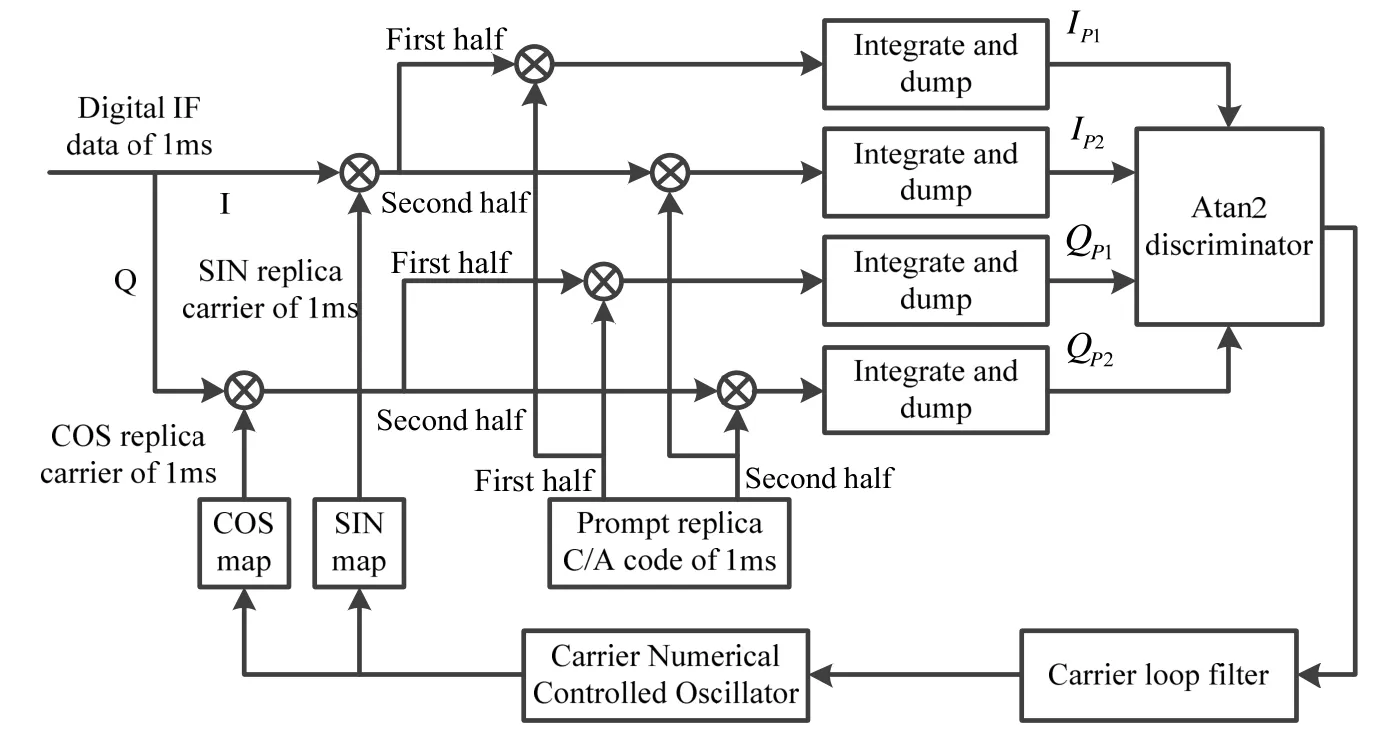
Fig.3 Block diagram of carrier frequency traction method based on half-millisecond integration
Next,two adjacent predetection integration value(I/Q) pairs of half millisecond are discriminated by Atan2 discriminator to compute an estimation of the frequency error.
where the time intervalt(n) -t(n- 1 ) of two adjacent epochs is 1/2 ms,which means the predetection integration timeTcohis 1/2 ms.Pcross_halfmsandPdot_halfmsdenote the dot product and cross product respectively which are computed through these adjacent predetection integration values (I/Q) pairs of half millisecond.
Finally,the frequency error estimation outputted from the Atan2 discriminator is filtered by a carrier loop filter and used to control the carrier NCO to produce the corresponding local replica carrier,which achieves the carrier frequency traction for BeiDou B3I signal.In addition,the dynamic carrier frequency synchronization is realized after continuous loop feedbacks.
According to (4),the function arctan2 returns the angular range of [-π,+π],and the frequency pull-in range of the proposed method based on half-millisecond integration iswhich means[-1000 Hz,+1000 Hz]assuming no noise in the I and Q signals.However,aimed at the traditional Atan2 discriminator that employs two adjacent predetection integration value (I/Q) pairs of one millisecond,the predetection integration timecohTis one millisecond and the effective frequency pull-in range is [-500 Hz,+500 Hz]if the sample time of the I and Q signals does not straddle the data transitions.When frequent data transitions occur during the carrier frequency traction,the direct use of the Atan2 discriminator based on one-millisecond integration will cause the signal tracking loop to lose lock easily.Then,it is necessary to limit the angular range returned from the function arctan2 at[-π/2,+π/2].Correspondingly,the frequency pull-in range of traditional Atan2 discriminator is reduced atwhich means [-250Hz,+250Hz]assuming no noise in the I and Q signals.Therefore,compared with the traditional FLL which employs Atan2 discriminator based on one-millisecond integration,the carrier frequency traction method proposed in this paper can expand the frequency pull-in range of FLL significantly,while processing the BeiDou signal which exists frequent data transitions.
Consequently,aimed at the dynamic BeiDou B3I signal,the theoretical analysis indicates that the proposed method based on half-millisecond integration can not only eliminate the effect of data transitions on the FLL but also expand the pull-in range of carrier frequency traction,which is suitable for the dynamic Compass receiver.
3 Experience and analysis
To evaluate the performance of the carrier frequency traction method based on half-millisecond integration presented in this paper,and aimed at the latest public B3I signal of BeiDou Navigation Satellite System,the actual vehicle experiment and high dynamic simulation are conducted.Then,the performance of the proposed method is analyzed and compared with that of traditional method which employs the Atan2 discriminator based on onemillisecond integration.
3.1 Actual vehicle experiment
The actual vehicle experiment was arranged on a certain ring road in the urban area of Beijing,and a set of BeiDou B3I digital IF data recorder was placed in the test vehicle.Utilizing the recorder,the radio-frequency signal received by the vehicle antenna was converted into the digital IF signal for storage.In the experimental process,the digital IF data of 30 min was collected.
Based on a standard desktop PC MATLAB,the acquisition of BeiDou B3I signal is conducted,in which the range of BeiDou satellites to be searched is set from PRN 1 to PRN 10.Due to the invisibility of some satellites and the blocking of high buildings during the experimental process,six satellites consist of PRN 1,PRN 2,PRN 4,PRN 6,PRN 7 and PRN 10 are acquired successfully.Once the acquisition is completed,the method proposed in this paper and the traditional method which employs the Atan2 discriminator based on one-millisecond integration are applied to carry out the carrier frequency traction for each Compass satellite signal separately.Then,the results of carrier frequency traction for each BeiDou satellite signal are shown in Fig.4,in which 0~1000 ms is used for carrier frequency traction of FLL,1000~1500 ms and 1500~3000 ms are used separately for carrier phase tracking of PLL with wide and narrow bandwidths.
From Fig.4,the FLL which applies the carrier frequency traction method proposed in this paper can successfully pull in all six BeiDou satellite signals.However,the FLL which employs the traditional method fails to pull in three BeiDou satellite signals consisting PRN 2,PRN 6 and PRN 7,which leads the corresponding signal tracking loops lose lock eventually.Since the carrier Doppler frequency rate-of-change during the vehicle experiment is small,the carrier Doppler frequency value after the signal tracking loop is successful locked,such as the Doppler frequency value at 2988 ms of each diagram in Fig.4,can be regarded as the carrier Doppler frequency value contained in the IF data processed by the acquisition module.As a consequence,the carrier Doppler frequency errors (namely the carrier frequency errors) of six Compass satellites,which are estimated from the acquisition,are computed as 143Hz,309Hz,164Hz,386Hz,222Hz and 67Hz respectively.Furthermore,it is detected that the C/N0s of BeiDou satellites PRN 7 signal and PRN 10 signal are about 39dB⋅Hz.However,the C/N0s of other four BeiDou satellite signals are all about 42 dB⋅Hz.
According to the previous analysis,there is frequent data transitions exist in the predetection integrators of FLL when processing the BeiDou B3I signal.Besides,the carrier frequency errors of the BeiDou satellites PRN 2 and PRN 6 are 309 Hz and 386 Hz respectively,which all exceed the frequency pull-in range [-250 Hz,+250 Hz]of traditional methodin the presence of data transitions,resulting in the failures of carrier frequency tractions.Moreover,due to the low C/N0of BeiDou satellite PRN 7 signal and the carrier frequency error 222 Hz is close to the boundary of effective frequency pull-in range 250 Hz,the FLL which employs the traditional method fails to pull in the BeiDou satellite PRN 7 signal.Consequently,compared with the traditional method,the carrier frequency traction method based on the half- millisecond integration proposed in this paper can eliminate the effect of frequent data transitions of BeiDou signal on FLL,and extend the pull-in range of BeiDou carrier frequency under vehicle dynamic situations.
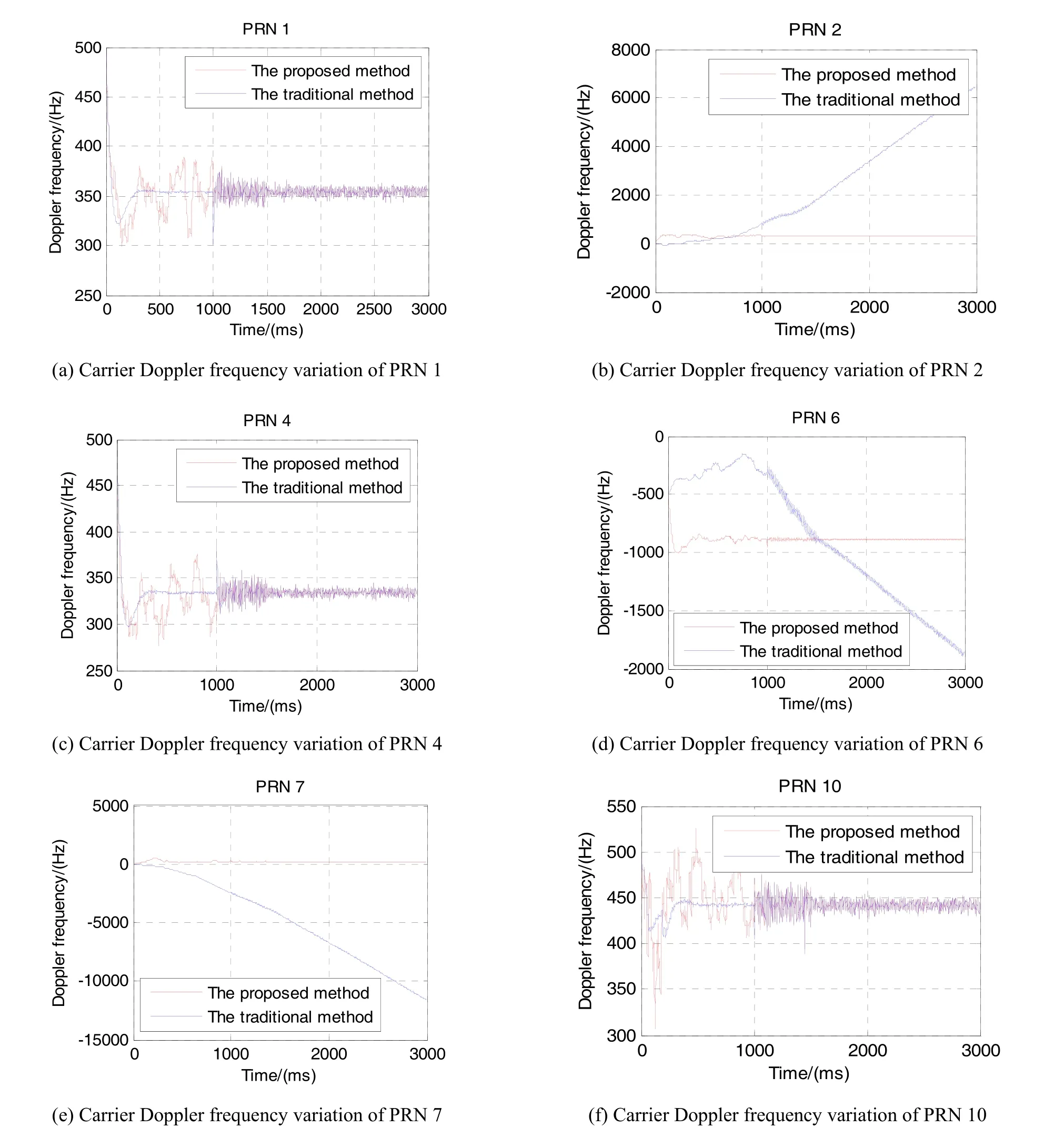
Fig.4 Carrier frequency traction results for each BeiDou satellite signal
3.2 High dynamic simulation
To further evaluate the performance of the proposed carrier frequency traction method based on half-millisecond integration in the presence of Doppler frequency rate-of-change,a high dynamic simulation is conducted.A GNSS simulator was used to generate the high dynamic BeiDou B3I IF signal directly,and the user was set to move towards the BeiDou GEO satellite PRN 1 in the simulator.During the movement of the user,the maximum of line-of-sight acceleration and jerk were set to 30gand 30g/s respectively.Besides,the C/N0of the BeiDou satellite signal was set to 43dB⋅Hz,and the digital IF data of 30 s was collected.
Since the user was set to move towards the BeiDou satellite PRN 1 in the simulator,the dynamic of the satellite signal of PRN 1 is the largest.Then,based on a standard desktop PC MATLAB,the acquisition of the satellite signal is completed.Next,the method proposed in this paper and the traditional method,which employs the Atan2 discriminator based on one-millisecond integration,are applied separately to carry out the carrier frequency traction.The result of carrier frequency traction for the satellite signal is shown in Fig.5,in which 0~1000 ms is used for carrier frequency traction of FLL,1000~1500 ms and 1500~4500 ms are used respectively for carrier phase tracking of PLL with wide and narrow bandwidths.Correspondingly,to compare the performance of different carrier frequency traction methods directly,Fig.5 illustrates the carrier Doppler frequency variation curve of the satellite signal and the predetection integration value of branch I outputted from prompt signal tracking loop.
From Fig.5,the carrier frequency traction method proposed in this paper can successfully pull in the high dynamic satellite signal,and output the predetection integration value of branch I which contains the navigation message.However,the FLL which employs the traditional methods fails to pull in the high dynamic satellite signal,since the carrier frequency error estimated from the acquisition extends the pull-in range of the traditional method in the presence of data transitions,which leads the signal tracking loop lose lock.Moreover,in the actual BeiDou hardware receivers,due to the long acquisition time when searching the high dynamic satellite signal and the large Doppler frequency rate-ofchange of high dynamic satellite signals,the frequency error of local replica carrier after acquisition-to-tracking transition gets bigger,which will lead the FLL that employs the traditional method extend the frequency pull-in range more easily.Nevertheless,the method proposed in this paper can not only eliminate the effect of the data transitions but also have a wide frequency pull-in range,which is more suitable for the high dynamic BeiDou signal.
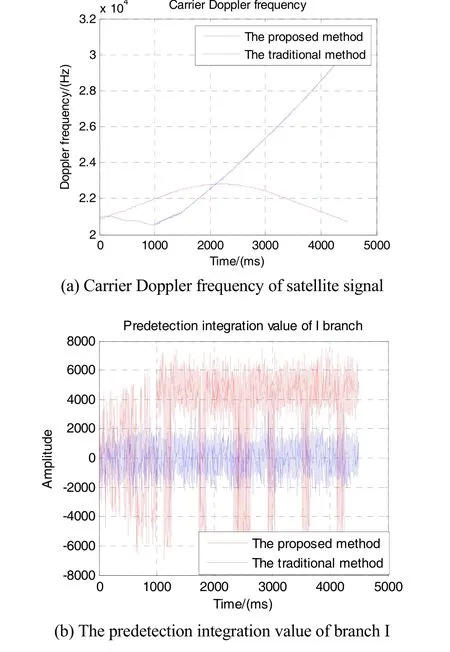
Fig.5 Carrier frequency traction results for high dynamic Compass satellite signal
Fig.6 compares the carrier Doppler frequency errors(namely the carrier frequency errors) outputted from the frequency discriminators of FLL in different methods with the presence of data transitions.The carrier frequency errors are filtered by a carrier loop filter and used to control the carrier NCO to produce the corresponding local replica carrier to conduct the carrier frequency traction.Then,the carrier frequency synchronization is achieved after continuous loop feedbacks.In addition,according to the carrier frequency error value shown in Fig.6,the effective frequency pull-in range of different methods used for high dynamic BeiDou signal can be reflected.
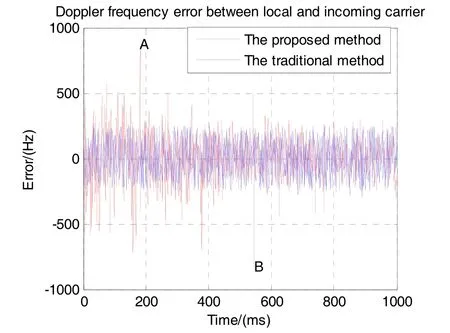
Fig.6 Comparison on carrier Doppler frequency errors for high dynamic Compass signal
From Fig.6,aimed at high dynamic BeiDou signal,the proposed method has a wide pull-in range of carrier frequency.Even if the local carrier Doppler frequency error values (namely the carrier frequency error values)are 872.5 Hz and -831.8 Hz as indicated respectively by points A and B in Fig.6,by utilizing the proposed method,the carrier frequency traction of high dynamic BeiDou signal can still be achieved successfully.On the contrary,the effective frequency pull-in range of the traditional method is just [-250 Hz,+250 Hz]in the presence of frequent data transitions.Consequently,compared with the traditional method,the carrier frequency traction method based on the half-millisecond integration proposed in this paper can not only eliminate the effect of frequent data transitions of BeiDou signal on FLL,but also extend the pull-in range of Compass carrier frequency under high dynamic situations.
4 Conclusion
Based on the analysis for characteristics of the FLL,which is subject to the frequent data transitions of Compass signal,a carrier frequency traction method of dynamic BeiDou signal based on half-millisecond integration is proposed in this paper.To eliminate the effect of data transitions,two adjacent predetection integration value pairs of half millisecond are extracted within the same data bit interval,and are discriminated by the Atan2 discriminator to estimate the carrier frequency error,during the carrier frequency traction every millisecond.Because of the predetection integration time of half millisecond,the frequency pull-in range of the proposed method is broadened significantly comparing with the traditional methods.Aimed at the latest public BeiDou B3I signal,the actual vehicle experiment and high dynamic simulation indicate that the proposed method can not only eliminate the effect of data transitions on FLL but also expand the frequency pull-in range of carrier frequency traction.Furthermore,the low complexity of the proposed method makes it easy to be applied in actual engineering scenes.
