一种基于递归滑动DFT信道化结构的DRFM干扰机设计
2020-01-07 11:10李辰梓余建宇郝万兵
火控雷达技术 2019年4期
李辰梓 余建宇 徐 伟 郝万兵
(西安电子工程研究所 西安 710100)
0 引言
现代雷达是在全天候复杂战场环境下快速、准确、可靠地进行目标探测、跟踪、制导和火控的重要装备[1],是战场上的“千里眼”,一旦破坏了雷达的正常工作,将使得战场上的大多数武器装备丧失作战能力,所以雷达对抗技术必然将在未来的战场上贯穿始终。目前雷达干扰采用的是基于数字射频存储(Digital Radio Frequency Memory,DRFM)技术,它能够快速地对雷达信号进行高速采样、存储复制、调制产生与雷达相参的干扰信号,目前采用DRFM技术实现的较新型干扰样式有密集假目标干扰,灵巧噪声干扰等,他们都能够对相参雷达进行有效的干扰。但是考虑到目前战场上复杂的电磁环境、频率捷变技术以及超宽带雷达的出现,这就需要我们基于DRFM技术的干扰机具有大的瞬时带宽,提高信噪比,在复杂的电磁环境中能够实时、快速地挑选出需要干扰的雷达信号。而数字信道化技术在接收灵敏度、工作带宽、雷达信号的截获能力等方面性能良好,具备接收同时到达多个雷达信号的能力,且信道化技术能抑制子信道带宽外的噪声提高信号的信噪比,适应现代战争的复杂电磁环境需求。所以本文选用逐点滑动DFT数字信道化结构来运用于雷达干扰机中,并给出了具体的介绍与仿真。
1 逐点滑动DFT信道化技术
1.1 逐点滑动DFT技术
目前数字信道化技术已经非常成熟,目前最常见的是基于多相滤波器组的数字信道化结构[2],但是由于多相滤波结构在时间分辨率和频率分辨率上存在相互制约关系,一般而言选用多相结构都会选择损失实时性来保障频率分辨率,但是实时性在干扰机中是比较重要的参数,因此本文选用另一种逐点滑动DFT的信道化结构来完成干扰机的设计,逐点滑动DFT信道化结构如图1所示。
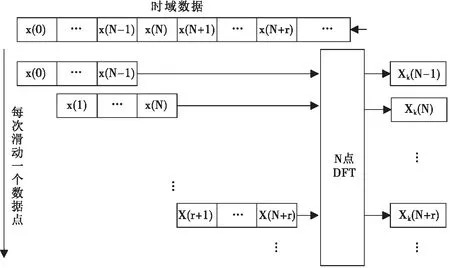
图1 逐点滑动DFT的信道化结构图
1.2 逐点滑动DFT的递归算法
由图1可以看出当AD采样的数据流每次1点滑动时,在第n时刻和n+1时刻窗口中的数据样本大量重复,后一个时刻的N点数据只是将前一个时刻的N点数据中的首个数据剔除,而在最后添加一个当前时刻最新的样本数据点,除此之外的N-1个数据完全相同,所以两个连续时刻的各自频谱之间必然存在联系[3],假设n-1时刻的N点DFT结果为Xk(n-1),n时刻的结果为Xk(n)。
(1)

(2)
根据式(1)和式(2)可以推出
=[Xk(n-1)-x(n-N)+x(n)]ej2πk/N
(3)
可以看出,计算Xk(n)只要通过前一个点Xk(n- 1)减去x(n-N),加上现在的x(n),再进行相移来计算,递归结构示意图如图2所示。
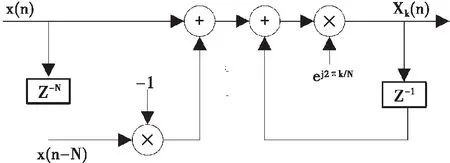
图2 逐点滑动DFT的递归结构示意图
1.3 递归逐点滑动DFT的频域加窗
由于DFT在当前时刻对N点数据进行信号进行处理时,相当于人为的加了矩形窗对数据截断,这样会造成频谱泄漏。为了减少频谱泄漏对后续信号处理的影响,通常对信号在时域加非矩形窗(如汉宁窗、汉明窗等),通过减小信号旁瓣幅度来降低DFT的频谱泄漏。但是如果在时域加窗会使得上面的递归逐点滑动DFT式(3)不成立,因此考虑对数据做完递归逐点DFT后进行频域加窗处理。由DFT的性质可知,时域乘积等效于频域的周期卷积,即数据为x(n),窗函数为w(n)可得
y(n)=x(n)w(n)↔Y(n,k)=X(n,k)·W(k)
(4)
窗函数选用N点汉宁窗来进行进行频域加窗[4],因为汉宁窗的DFT结果只有三个非零值,对三个非零值同时进行整数倍放大,可得三个值为分别为W(-1)=-1,W(0)=2,W(1)=-1,所以频域加窗的表达式为
Y(n,k)=X(n,k)·W(k)=X(n,k)·W(0)+
X(n,k+1)·W(-1)+X(n,k-1)·W(1)
(5)
所以根据式(5)可以完成对逐点DFT后的数据进行频域加窗来降低频谱泄露,从而得到基于递归的逐点DFT信道化频域加窗结构如图3所示。
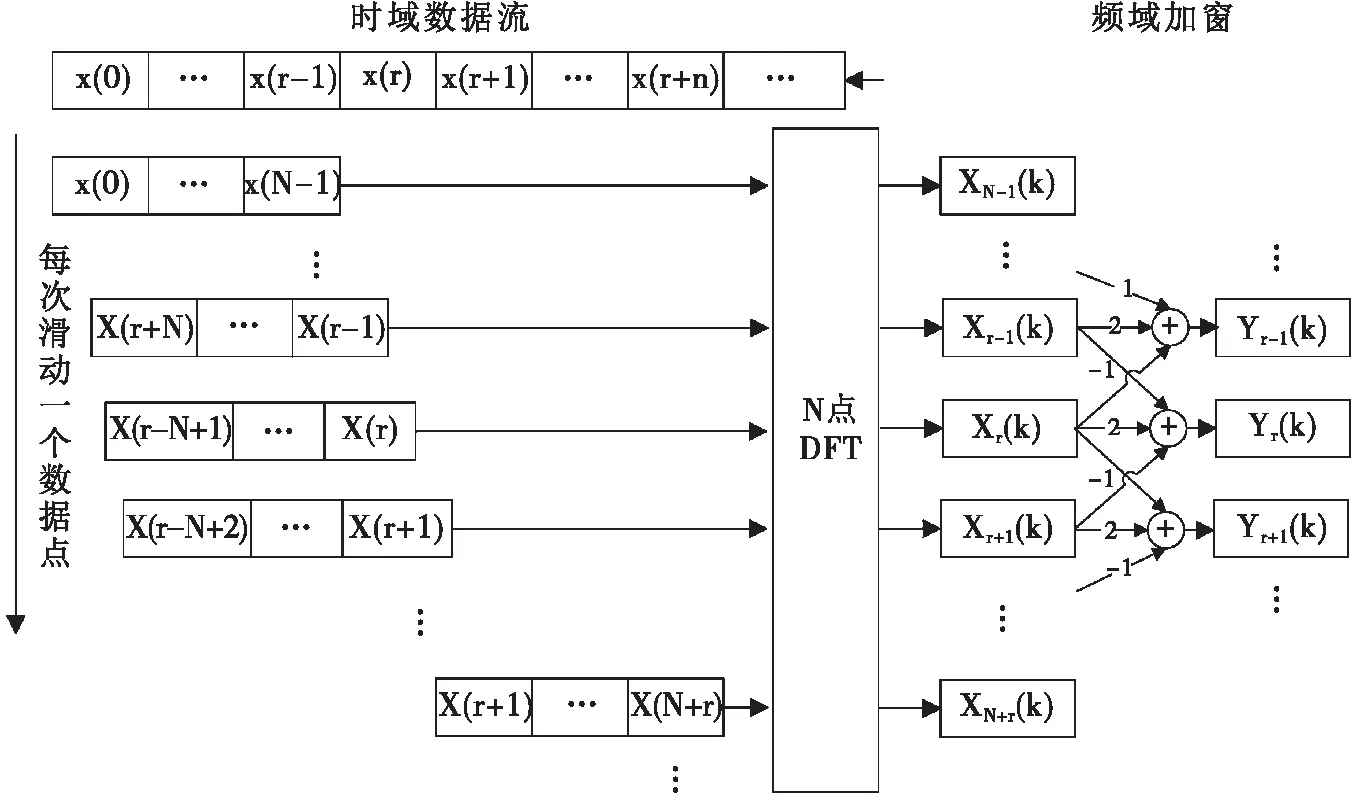
图3 递归逐点滑动DFT的频域加窗结构图
2 基于逐点滑动的信道化的干扰机技术
2.1 逐点滑动DFT技术
数字信道化结构的干扰机的结构主要分为三个部分,如图4所示。
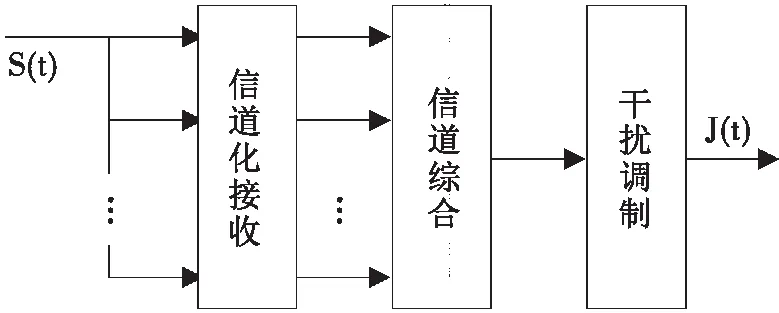
图4 数字信道化下雷达干扰机基本结构
2.2 仿真分析
本文采用递归算法的逐点DFT信道化结构,每次滑动作32点DFT,采样率fs为1.2GHz,因此干扰机对应的时间分辨率为0.83ns,频率分辨率为37.5MHz。雷达信号S(t)选用线性调频信号,数学表达式为
(6)
其中信号时宽T为10μs,带宽B为40MHz,中心频率f0为300MHz,信号PRI设置为40μs,到达雷达干扰机时间为5μs。对信号添加信噪比为0dB的噪声信号,仿真得雷达的时域和频域图如图5所示。
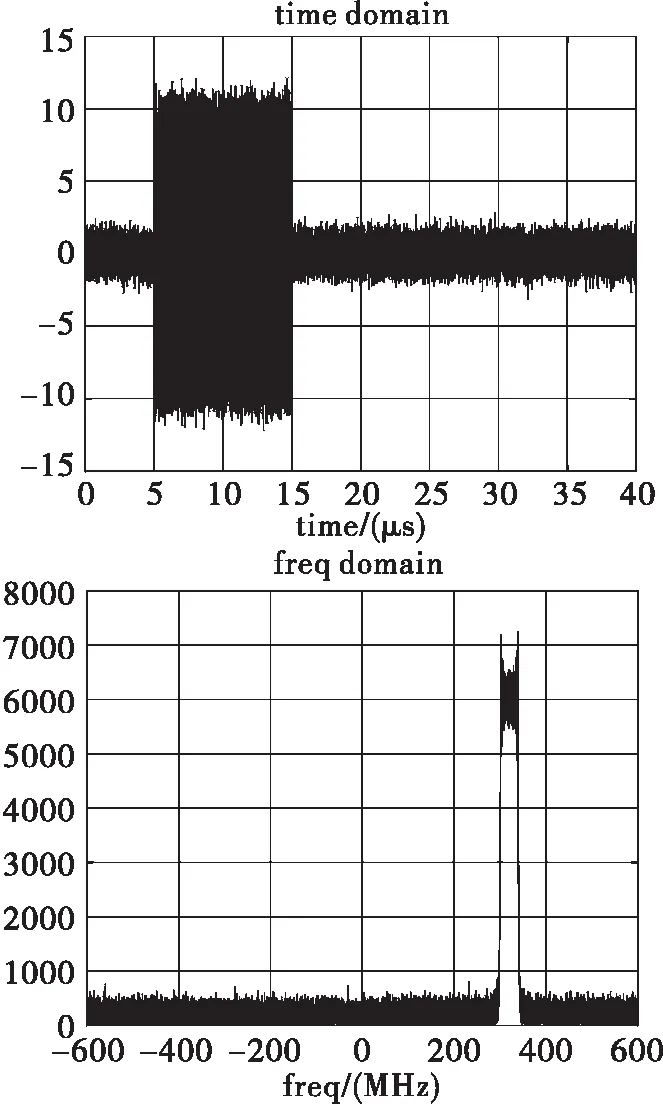
图5 雷达信号时域频域图
采用递归算法的逐点滑动DFT信号化结构对雷达信号接收,经过AD采样后对数据逐点作32点DFT,然后经过频域加窗,可以得到信号的信道化接收图如图6所示。


图6 信道化干扰机对雷达信号的接收
可以清楚地看到雷达信号出现在第8和第9信道内,但是由于信道的交叠,同时部分雷达信号也会出现在第7和第10信道内。对信道内的的信号进行CFAR处理后,根据信号的连续性判别,判别依据是当前时刻信道内有信号时标志位置1,连续8个时刻,如果8个时刻的标志位相加大于6即判断信号连续存在,最终可以得到信号位于第8和第9信道内,对两个信道的信号进行叠加合成,可以得到两个合成信号的时域和频域图像如图7所示,对比图3可以看出对信号可以进行完整准确的接收。
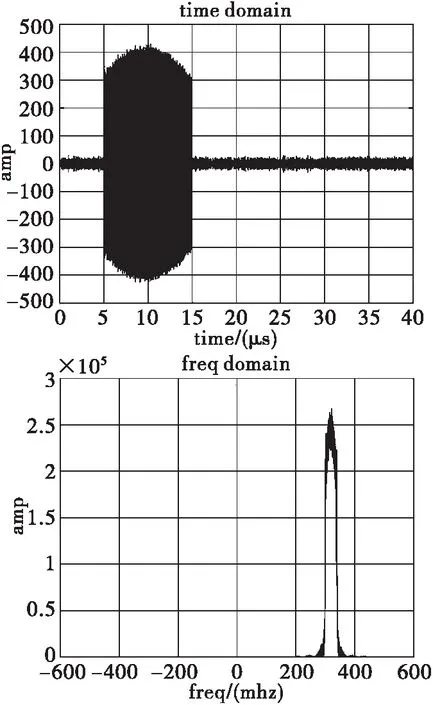
图7 信道内接收信号的时域频域图像
对上面接收的信号进行距离维调制产生一个在距干扰机300m位置的单假目标,在时域相当于滞后2μs,通过仿真可以得到调制后干扰信号对雷达的脉压效果如图8所示,可以看出干扰信号对雷达脉压效果和单纯的雷达真实信号回波本身做脉压效果基本一致并且在时域相距2μs,具有很好的脉压效果。干扰调制时给信号进行多普勒调制,进行仿真可以得到雷达对干扰信号也具有很好的MTD效果,如图9所示。
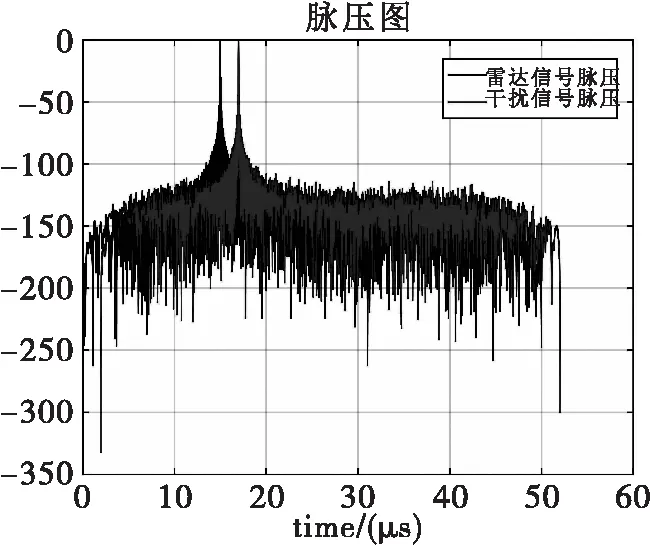
图8 干扰信号对雷达脉压图
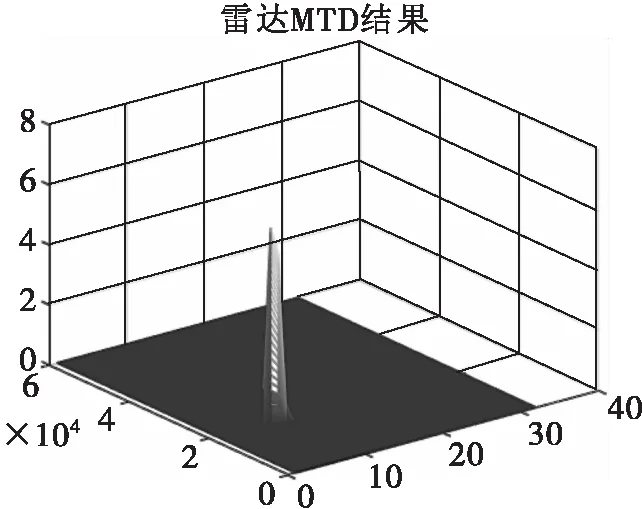
图9 干扰信号对雷达MTD图
上述我们进行了单个假目标干扰的效果仿真,这只是一种最基本的并且具有代表性的欺骗式干扰,我们还可以通过调制形成多假目标等欺骗式干扰。接下来我们再对上述接收后的信号进行灵巧噪声卷积干扰样式的压制类干扰样式仿真。灵巧噪声卷积噪声干扰是将干扰机接收到的雷达信号进行存储,然后经过调制器将视频噪声信号与存储的雷达信号作卷积,经功率放大器放大后将信号进行发射的干扰方法[5],选用均值为0,方差为1,时宽为15μs的高斯白噪声信号作为视频噪声信号。将高斯白噪声与接收到的雷达信号做卷积调制得到的干扰信号来做脉压和MTD,得到的图像如图10、图11所示。
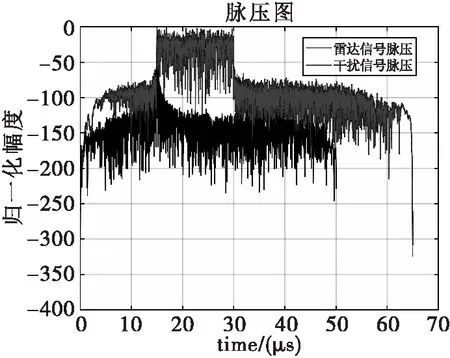
图10 干扰信号对雷达脉压图
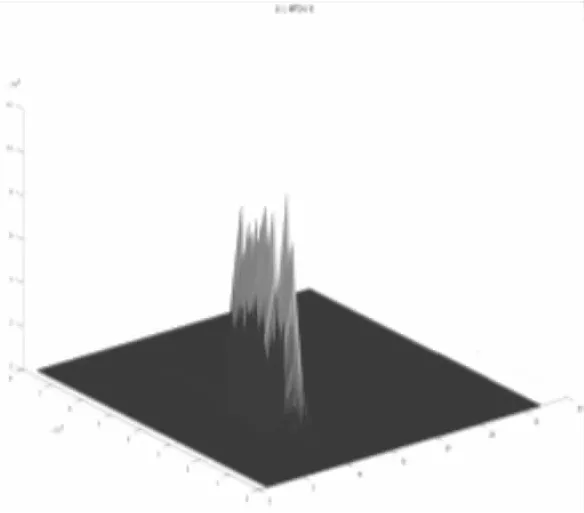
图11 干扰信号对雷达MTD图
图10和图11可以看到灵巧噪声干扰信号经雷达的匹配滤波后出现了遮盖波形,能够完全遮盖雷达本身信号的脉压结果,可以产生很好地压制干扰效果。
通过上面的仿真可以看出,采用递归算法的逐点滑动DFT信道化结构进行的干扰机设计能够很好地对雷达信号在信噪比为0dB的环境下进行准确的高精度接收,并且能够很好地产生欺骗性干扰和压制性干扰两类干扰样式。
3 结束语
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
海军航空大学学报(2021年1期)2021-09-01
保健与生活(2021年2期)2021-02-04
舰船电子工程(2020年3期)2020-06-11
舰船电子工程(2020年1期)2020-03-03
航天电子对抗(2020年6期)2020-02-04
舰船电子对抗(2019年5期)2019-12-04
老年博览·上半月(2019年5期)2019-09-10
华声文萃(2019年4期)2019-09-10
家庭科学·新健康(2018年5期)2018-06-08