
电动汽车充电桩用磁保持继电器动态特性优化
2019-12-20 05:56:04车赛迟长春左少林王泽涛
汽车技术 2019年12期
车赛 迟长春 左少林 王泽涛
(上海电机学院,上海 200120)
1 前言
充电桩作为电动汽车的配套系统,可提供快速、安全的充电服务,为电动汽车的快速发展提供有力保障。继电器作为充电桩的执行单元,在实际工作中需要频繁动作,实现用户自助充电、计费监控、故障报警等智能控制功能[1]。当遇到突发状况,例如充电桩发生短路时,电动汽车无法正常进行能量补给,继电器应能自动断电以保障人身安全。因此,继电器的闭合可靠性及使用寿命直接关系到充电桩的安全与稳定。
相比于传统的电磁式继电器,磁保持继电器结构简单,控制方便,无需长时间通电,温升和噪声较小,且受电网波动的影响很小。目前,国内外学者已对磁保持继电器开展了诸多研究,如电磁仿真和动态建模仿真[2-3]、抗干扰分析研究以及控制电路设计[4-5]等。
研究显示,磁保持继电器在闭合过程中达到稳态前,动、静触头由于碰撞会发生弹跳。多次弹跳产生的短电弧使得接触部位产生高温,由于熔池内外存在很大的温度梯度,熔池内金属快速凝固结晶,使得接触部位形成熔焊点。当触点的熔焊力大于其分断力时会产生熔焊,这种情况对于容性负载更为严重:容性负载接通过程中,瞬时峰值电流可达额定电流的10~15 倍,峰值电流附近的闭合过程加速了触点的烧损,严重损害磁保持继电器的使用寿命,导致充电桩发生故障[6]。
因此,探究动态合闸特性的影响因素及其改善方法,提高磁保持继电器的使用寿命和闭合可靠性,减少动、静触头的弹跳次数,对充电桩的稳定运行具有重要意义与实用价值。
2 磁保持继电器分析
本文针对YK818-B系列充电桩用磁保持继电器进行研究,如图1 所示。线圈额定电压为12 V 直流,单线圈电阻范围为129.6~158.4 Ω,线圈额定电流范围为0.076~0.093 A,2 500匝,吸合释放时间小于20 ms。

图1 YK818-B系列磁保持继电器
2.1 电磁机构
磁保持继电器的电磁机构包括衔铁组件(含永久磁铁和上、下磁极片)、铁芯、轭铁和线圈[7],如图2 所示。轭铁与上、下磁极片之间的工作气隙和衔铁组件可将电磁能转换为机械能,从而带动整个接触机构工作。
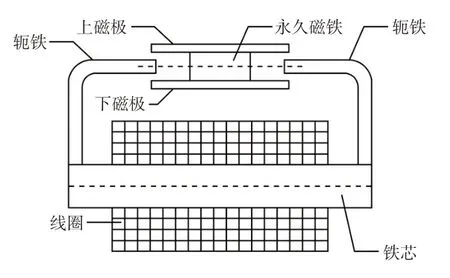
图2 电磁机构示意
2.2 电磁机构仿真与分析
在ANSYS 软件的Maxwell 3D Design 中建立电磁机构仿真模型,永磁铁为Y30BH,铁芯和轭铁为电工纯铁(DT4E)。网格划分时,衔铁组件附近的网格精度更高,其余部件自由划分即可,如图3所示。
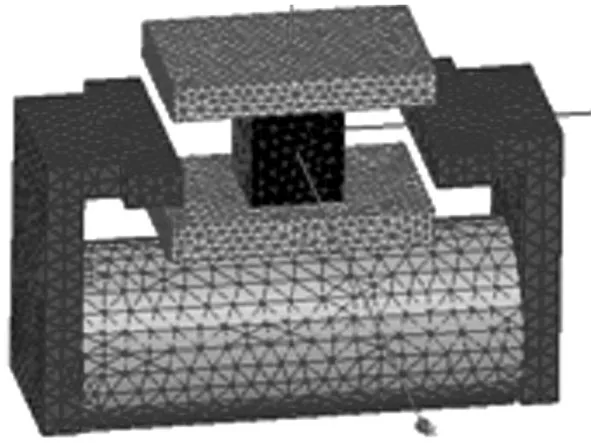
图3 电磁机构网格划分
对衔铁组件进行参数化分析,其中磁动势范围为0~390 At,旋转角度范围为-7°~7°,以麦克斯韦理论为基础,进行电磁场的求解计算,仿真得到不同磁动势和旋转角度的合力矩及其变化趋势,如图4所示。
3 动态模型系统仿真及优化
3.1 动态数学模型的建立
磁保持继电器电磁机构闭合和关断的动态过程中,涉及电磁、热能变化及机械运动等多方面因素,因此需要在电磁系统上使用电压平衡方程,在磁场上使用麦克斯韦方程,机械运动遵循达朗贝尔运动方程,这些相互联系的方程构成了描述机构动态过程的微分方程组[8],忽略细微的涡流损耗及线圈工作温度变化,方程组表达形式为:
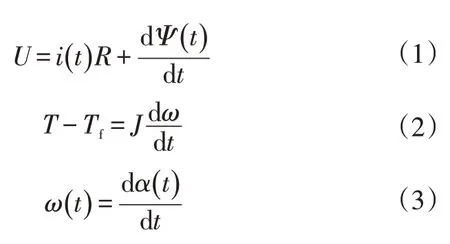
式中,U为线圈励磁电压;R为线圈电阻;i、Ψ分别为线圈电流及电磁系统磁链;T、Tf分别为电磁转矩和反作用力矩;J为衔铁组件的转动惯量;ω为衔铁组件角速度;α为衔铁组件旋转角度;t为时间。
其初始条件为:Ψ|t=0=Ψ0,ω|t=0=0,α|t=0=α0。
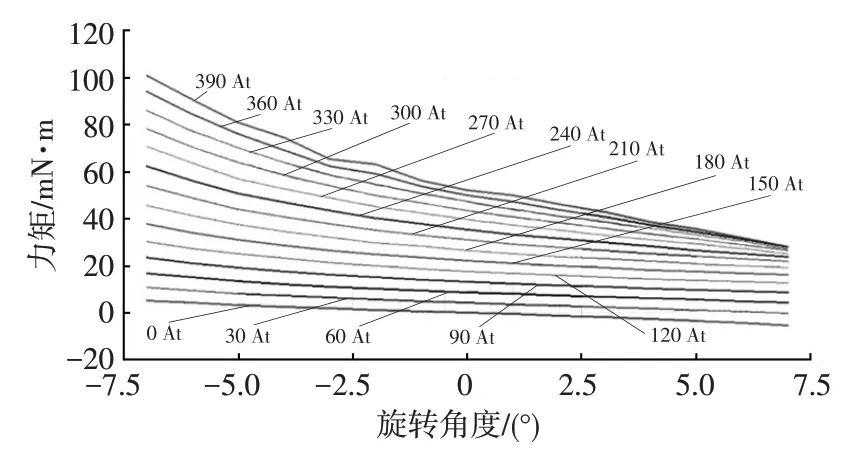
图4 衔铁组件合力矩特性
3.2 模糊控制器设计及优化
由图4可知,为了降低动、静触头碰撞的速度,应在闭合初始阶段将其占空比设置为最大,在末尾阶段将占空比设为最小,由此建立模糊规则如表1所示。表1中,输入量为衔铁组件旋转角度α和旋转角速度ω,输出量为脉冲宽度调制(Pulse Width Modulation,PWM)占空比D,XS、S、M、L、XL分别表示很小、小、中、大、很大。
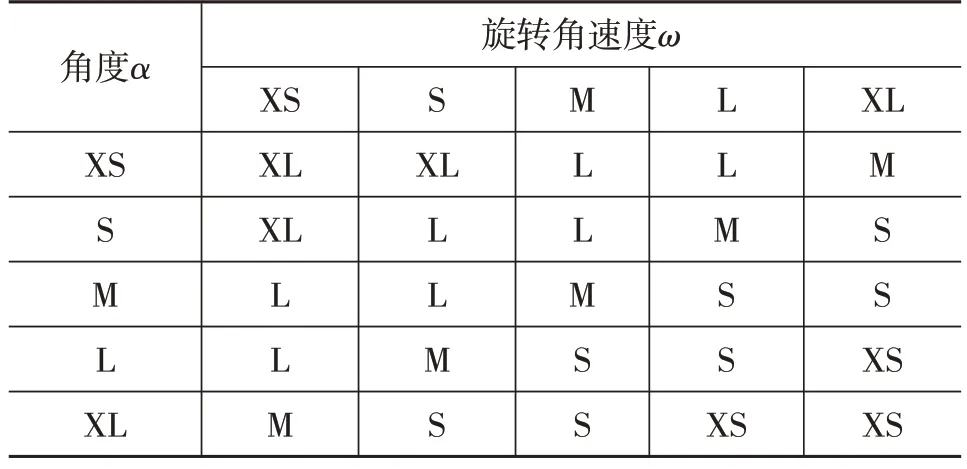
表1 模糊规则
当α和ω很小时,输出的PWM 占空比很大,使通入线圈的脉冲电流很大,增大了衔铁组件的合力矩及旋转速度,从而达到快速闭合的目的,可提高磁保持继电器的可靠性。反之,当PWM占空比很小时,减小衔铁组件在动、静触头碰撞前的角速度,以减少触头间的弹跳。
为了进一步缩短闭合时间,减少动、静触头间的弹跳,采用遗传算法优化模糊控制规则。本文遗传策略设置为随机均匀分布选择法、算数交叉法及自适应变异法。设置遗传算法种群规模为20,交配概率为0.8,变异概率为0.2,进化代数达到100 代时算法停止。对于模糊控制规则,本文采用十进制编码方式,使用1~5 依次代表XS、S、M、L、XL 5 个语言值,即数字化模糊控制规则,形成遗传算法的个体。控制目标为在旋转速度小于模糊控制下的旋转速度时,使得闭合时间最短,适应度函数为min(c1·t+c2·ω),{t,ω|θ=-7°},其中c1、c2为常系数。优化流程如图5所示。
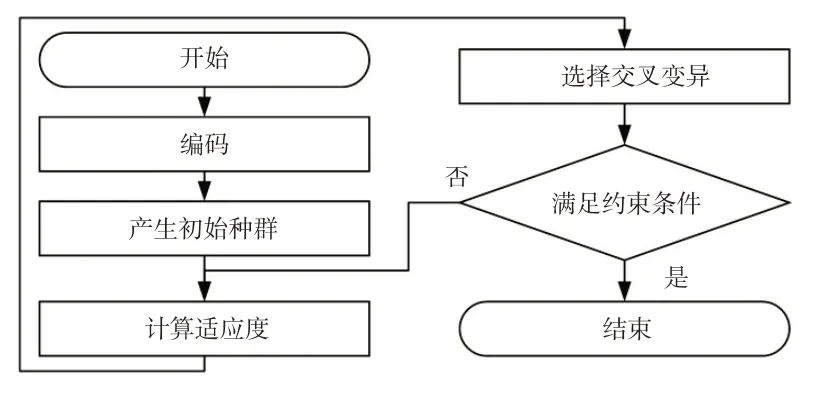
图5 遗传算法流程
经过94 代达到最优解,最优结果转换成模糊规则如表2所示。
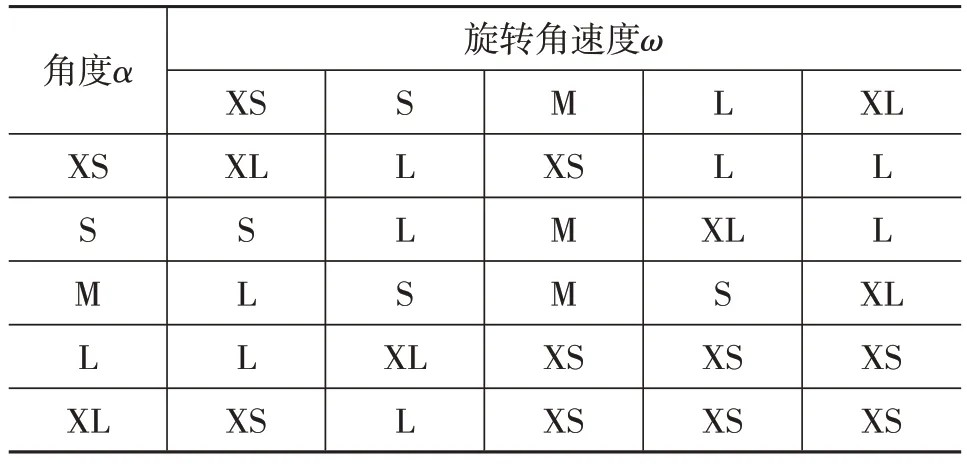
表2 优化后的模糊规则
3.3 动态系统模型建立
根据磁保持继电器的动态数学模型,在MATLAB/Simulink 中建立主电路模块、机械运动控制模块、模糊控制模块及遗传算法优化模糊控制模块,如图6所示。
3.4 仿真结果对比分析
模型中包含了原始系统、模糊控制系统及遗传算法优化模糊控制系统,将3个系统的机械运动控制模块输出的角度及角速度进行对比,结果如图7所示。

图6 磁保持继电器动态系统模型
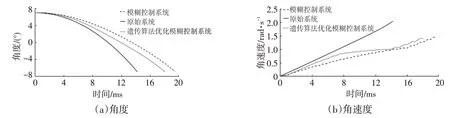
图7 角度和角速度仿真结果对比
由图7可知,模糊控制降低了原始系统衔铁组件的角速度,但旋转时间增加较多。采用遗传算法优化模糊控制后,闭合时间和衔铁组件运动结束时刻角速度相对于模糊控制明显减小,动态特性更优,从而减小动、静触头接触时的碰撞力,减少触头间的弹跳。
4 试验验证
触头闭合时的速度较小,难以捕捉到具体弹跳时长及现象,因此,在触头两侧串联采样电阻与直流电源,试验原理如图8 所示。在闭合过程中,采用示波器捕捉采样电阻两端的电压波形,即可直观地反应触头的弹跳现象。
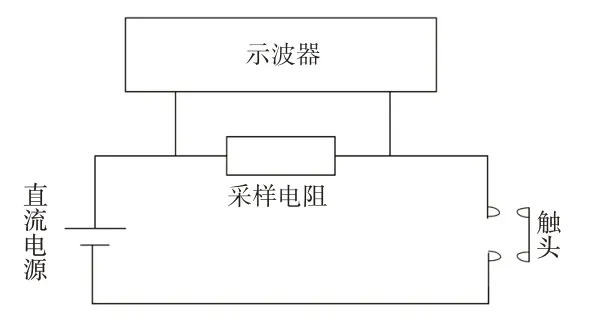
图8 试验原理
利用图8所示的原理,搭建样机开展试验,如图9所示。利用样机分别测出原始系统、模糊控制系统以及遗传算法优化模糊控制系统的触头弹跳波形,如图10所示。
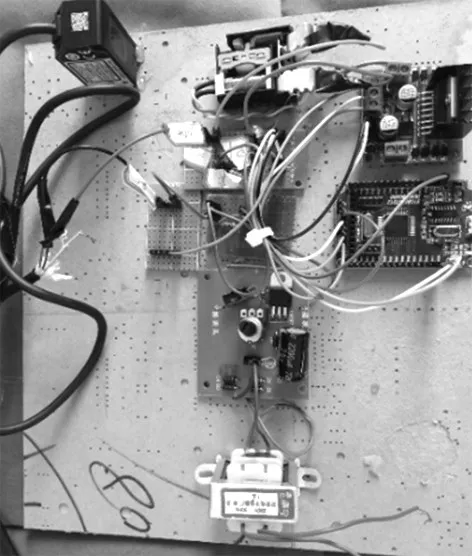
图9 实物样机
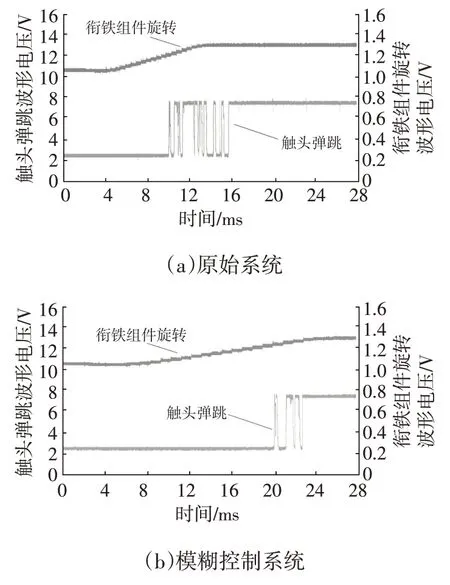
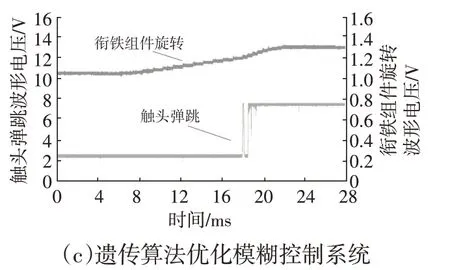
图10 触头弹跳及衔铁组件旋转波形
由图10 可以看出:原始系统中触头弹跳现象最严重,弹跳时间约6 ms,完全闭合时间约12 ms;线圈电流采用模糊控制优化后,触头弹跳明显减小,弹跳时间约3 ms,但衔铁组件旋转时间过长,触头完全闭合时间约19 ms,虽然触头弹跳减少,但闭合时间过大,闭合可靠性大幅降低;采用遗传算法优化模糊控制后,衔铁组件旋转时间降至16 ms,且触头弹跳时间缩小至约1 ms。
5 结束语
本文针对充电桩用磁保持继电器合闸过程中触头弹跳引起的温升、熔焊及损耗问题,进行了衔铁组件电磁仿真和动态系统建模仿真,使用遗传算法对合闸过程模糊控制策略加以优化。通过试验获得了原始系统、模糊控制系统、遗传算法优化模糊控制系统的合闸过程波形,结果表明:采用遗传算法优化模糊控制的方法可有效改善触头弹跳现象,且闭合时间相对于模糊控制系统明显减小,可提高磁保持继电器的使用寿命和稳定性。
猜你喜欢
铁道通信信号(2020年8期)2020-02-06 09:13:22
电子测试(2018年22期)2018-12-19 05:12:42
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年23期)2016-05-17 03:53:43
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
火控雷达技术(2016年1期)2016-02-06 02:18:01
电源技术(2015年11期)2015-08-22 08:50:38
中国铁道科学(2015年4期)2015-06-21 06:46:06
