
基于载荷和坡道识别的纯电动客车自适应换挡策略研究*
2019-12-20 05:56:04李明清靳光盈朱宝全
汽车技术 2019年12期
李明清 靳光盈 朱宝全
(1.长春汽车工业高等专科学校,长春 130013;2.东北林业大学,哈尔滨 150040)
1 前言
为改善电动汽车的动力性,纯电动汽车传动系统趋于2 挡或多挡化[1]。换挡规律决定变速装置的换挡时刻,直接影响电动汽车电驱动系统性能,进而影响整车动力学和续驶里程。国内外学者对2 挡或多挡变速器的换挡规律进行了大量研究。文献[2]对动力性、经济性换挡模式进行了研究,选择车辆速度、油门踏板开度和车辆纵向加速度为换挡控制参数,设计了电动汽车用最佳动力性和最佳经济性换挡规律;文献[3]以2挡AMT纯电动汽车为研究平台,理论推导了电动汽车经济性换挡规律设计方法,并提出基于支持向量机的纯电动汽车经济换挡策略;文献[4]对电动汽车处于制动工况时的升、降挡规律开展了研究,以提高能量回收利用效率为目标,设计了制动工况电动汽车最佳换挡规律;文献[5]分析了整车质量和道路坡度对换挡规律的影响,基于车辆负载识别结果制定了复杂行驶工况下匹配多挡AMT的纯电动汽车综合换挡规律。
本文运用无迹卡尔曼滤波算法设计整车质量和道路坡度联合估计算法,并根据车辆载荷及道路坡度实时辨识结果,采用线性插值的方式动态修正电动汽车的换挡规律,以避免车辆载荷或道路坡度变化带来的意外换挡和换挡循环问题。
2 纯电动客车电驱动系统及建模
2.1 纯电动客车电驱动系统
本文所研究的纯电动客车是在传统客车的基础上改装而成的,其动力总成布置采用单电机后轮驱动的形式,如图1 所示。电池管理系统负责设定某时刻充、放电功率的限值,同时保证电池的可靠性。能源系统和电力驱动系统通过CAN 网络进行通信,在整车控制器的控制下协调工作,实现整车驱动、再生制动等功能[6]。

图1 纯电动客车电驱动系统组成
2.2 基于Cruise的整车建模
利用Cruise搭建纯电动客车电驱动系统模型,主要包括车辆模块、驾驶员模块、电池模块、电机模块、变速器模块、主减速器模块、差速器模块、车轮模块和换挡规律模块[7],如图2所示。模型中各模块详细参数如表1所示。
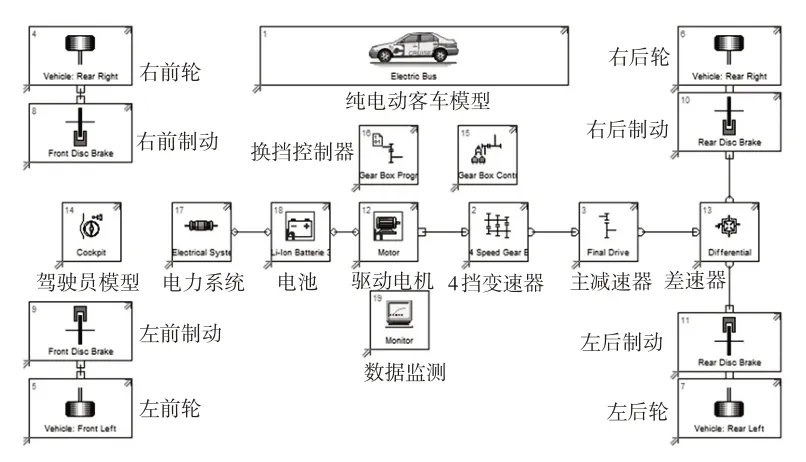
图2 基于Cruise搭建的整车模型

表1 模型参数设置
3 基于无迹卡尔曼滤波的载荷和坡度辨识算法
3.1 无迹卡尔曼滤波算法原理
无迹卡尔曼滤波(Unscented Kalman Filter,UKF)是通过无损变换使非线性系统方程适用于线性假设下的标准卡尔曼滤波体系。UKF 以无损变换(Unscented Transformation,UT)为基础,采用卡尔曼线性滤波框架,被广泛应用于导航、目标跟踪、信号处理和神经网络学习等多个领域。UKF算法原理如图3所示[8]。
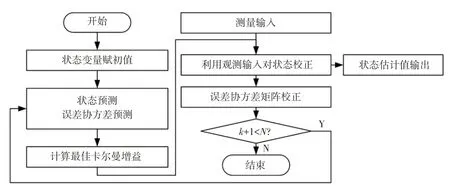
图3 UKF算法原理流程
3.2 基于无迹卡尔曼滤波的辨识算法设计
通常,整车实际载荷和道路实际坡度均未知,本文以车辆纵向车速v、整车质量m和道路坡度θ为系统状态变量,即x(t)=(v(t),m(t),θ(t))T。假设道路坡度和整车质量随时间变化缓慢,即两者对时间的导数约等于0,则系统方程可简化为[9]:

式中,Ft为驱动力;Fi为滚动阻力;Fw为空气阻力;Ff为滚动阻力。
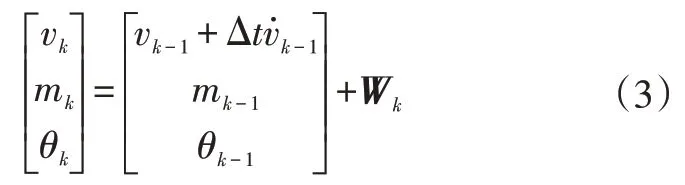
采用前向欧拉方法对上式进行离散化可得:

式中,Δt为采样时间间隔。
假设系统噪声Wk和测量噪声Vk均为高斯白噪声,二者相互独立且均值为零,其协方差分别为Qk和Rk,则系统状态方程为:

式中,Tm为驱动电机实际输出转矩;ig为变速器速比;i0为主减速比;ηT为传动系统效率;r为车轮半径;CD为空气阻力系数;A为车辆迎风面积;ρ为空气密度;f为滚动阻力系数。
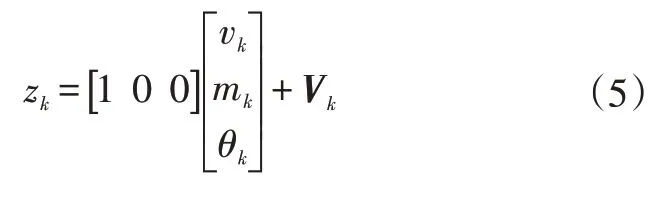
测量方程为:
4 基于载荷和坡度辨识的自适应换挡策略
最佳换挡策略影响因素较多,不仅取决于驾驶员的操纵信息和车辆状态参数,还与车辆行驶工况密切相关。如果所有道路类型均采用与平直道路相同的换挡策略,自动变速系统将会出现坡道频繁换挡、弯道意外换挡等现象。因此,有必要针对车辆实际载荷和道路坡度制定合理的换挡策略。
4.1 兼顾经济性的最佳动力性换挡策略
目前工程领域普遍采用彼得罗夫提出的以油门踏板开度和车速为控制参数,基于车辆稳定行驶工况设计的换挡策略[10]。根据优化计算时的目标函数不同可分为最佳动力性换挡策略和最佳燃油经济性换挡策略。针对电动汽车,最佳动力性换挡策略可充分利用电机牵引力,根据相邻挡位驱动力曲线获取。
利用解析法设计最佳动力性换挡曲线的方法为:保持油门踏板开度恒定,若相邻2个挡位的驱动力曲线有交点,则该交点即为动力性换挡点;如果无交点,则选取当前挡位最大电机安全转速对应的车速作为最佳动力性换挡点[11]。
如图4 所示,相邻2 个挡位驱动力曲线存在重叠区域,在最佳动力性换挡区域内任一点切换挡位可保证换挡前、后整车驱动力一致,理论上该区域内的点均可作为最佳动力性换挡点。从节能角度出发,本文选取该区域内驱动系统效率最高的点作为最佳换挡点得到升挡曲线,同时采用等延迟方法得到降挡曲线,如图5所示。
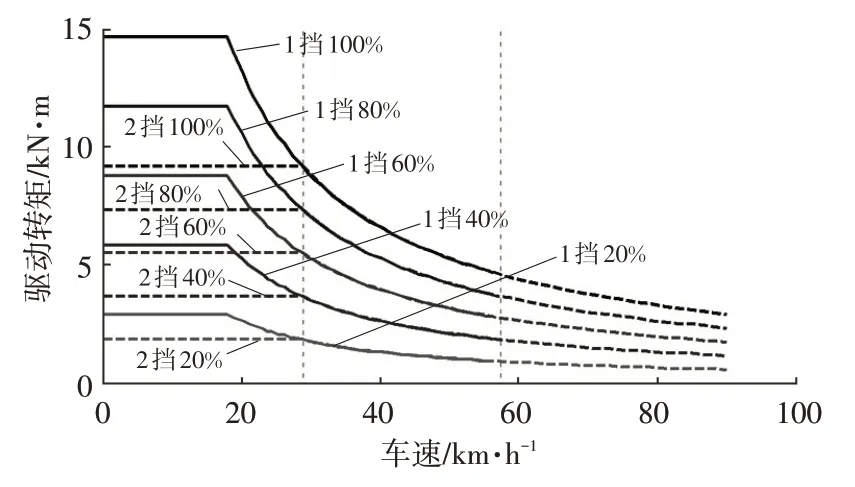
图4 最佳动力性换挡规律图解法原理
4.2 不同载荷工况下的换挡策略
本文研究对象空载质量为m0=13 000 kg,满载质量为mz=18 000 kg。假设除车辆载荷外其他条件恒定,按照前述最佳动力性换挡策略的解析法可得车辆空载和满载工况下对应的换挡车速vm0和vmz分别为[12]:

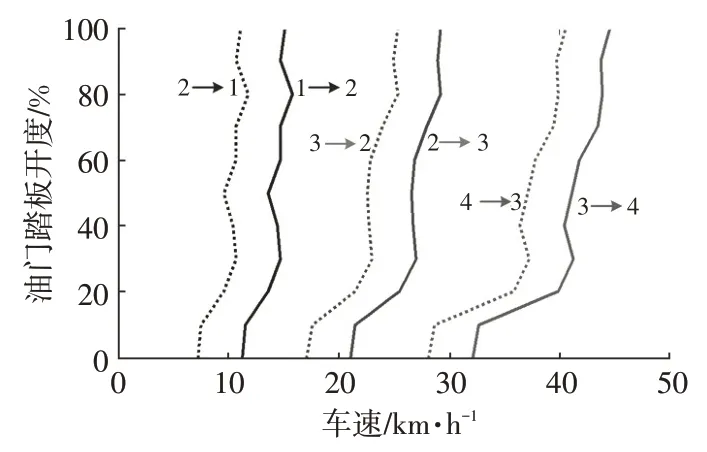
图5 最佳动力性换挡规律
此时换挡车速为:

提高车辆对不同载荷适应能力的同时,为降低计算量,本文选择线性插值法获取任意车辆载荷对应的最佳动力性换挡点,该过程分别以满载和空载条件下最佳动力性换挡线为上、下界,根据车辆实际载荷,采用插值获得换挡曲线:


以2 挡升3 挡换挡线为例,基于车辆载荷修正换挡规律的原理如图6所示,从图中3种不同车辆载荷对应的换挡线可知,车辆载荷对换挡点影响较大,而车辆空载与满载工况对应换挡曲线差别最大,相同油门踏板开度对应的换挡车速随车辆载荷增大而增大。
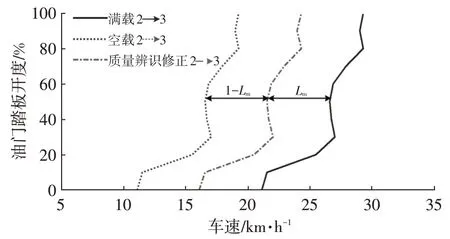
图6 基于整车质量的换挡规律修正方法
4.3 不同坡道工况下换挡策略
假设vα0为电动汽车在平路工况下所设计的换挡车速,αmax为电动汽车最大坡度角,根据前述最佳动力性换挡策略可设计出电动汽车在最大坡度角上行驶的最佳动力性换挡规律曲线vαmax。其他条件保持不变时,平坦路面换挡曲线vα0和最大爬坡工况换挡曲线vαmax为[12]:
假设车辆正常行驶过程中道路坡度角为α,同样可采用前述解析法求得该坡度角对应的最佳动力性换挡规律,但是实际行驶中坡度角是连续变化的随机变量,无法针对每个坡度角进行换挡规律设计。首先将任意坡度角α下对应的换挡车速vα表示为:


以2 挡升3 挡为例,基于坡度大小修正换挡规律的原理如图7所示,从图中3种不同坡度角对应换挡线可知,坡度对换挡点影响较大,平路工况与最大坡道工况对应换挡曲线差别很大,相同油门踏板开度对应换挡车速随坡度角增大而增大。
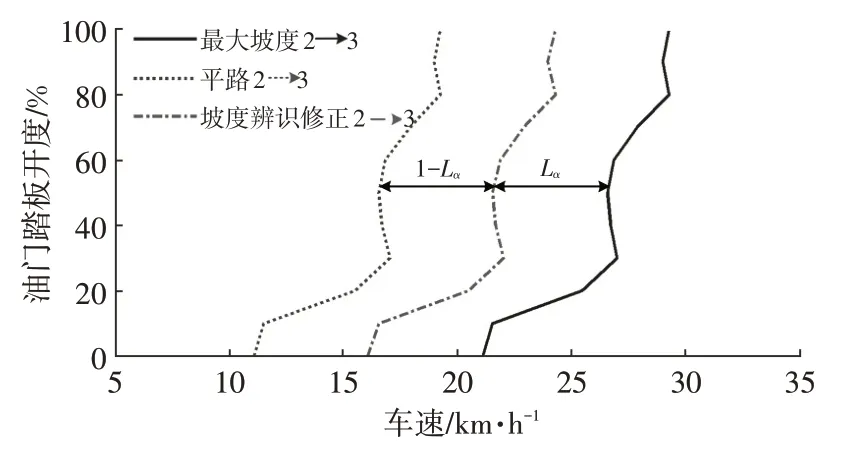
图7 基于坡度的换挡策略修正方法
4.4 车辆载荷和道路坡度耦合工况的换挡策略
整车质量和道路坡度在挡位决策中通常定义为同一优先级。实际行驶工况中道路坡度与整车载荷同时变化时,首先采用4.2节的方法根据识别载荷利用基本换挡曲线插值获得当前车辆载荷下平路和最大爬坡度条件下的换挡曲线,然后根据4.3节提出的基于道路坡度的挡位决策方法,采用线性插值得到任意道路坡度对应的最佳动力性换挡点,该插值过程分别以当前载荷下最大爬坡度工况和平路工况对应换挡曲线为上、下界。
5 仿真及试验验证
5.1 载荷及坡度辨识算法仿真验证结果
为验证本文提出的基于UKF 的车辆载荷和坡度辨识方法的有效性,在仿真环境下设置整车质量为15 000 kg,道路坡度为5%,对质量和坡度联合估计算法进行仿真分析,结果如图8 所示。
由图8可知,采用UKF算法均能够较好地实现对实际整车质量和道路坡度的辨识。道路坡度估计的收敛时间较短,存在约1.05 s 滞后,整车质量估计的收敛时间稍长,存在约1.51 s 滞后,总体上本文设计的整车质量和坡度估计算法延迟时间均较短。从误差角度分析,在辨识结果收敛后,整车质量和坡度辨识结果最大误差分别为0.08%和0.62%,均在可接受的范围内。所以本文设计的整车质量和坡度估计算法收敛速度较快、精度较高,可用于自适应挡位决策。

图8 车辆载荷和坡度辨识算法仿真验证
5.2 自适应换挡策略实车验证结果
为验证本文提出的基于车辆载荷辨识的换挡规律修正方法的有效性,选择目标试验车辆进行实车道路试验,试验结果如图9所示。首先针对试验车辆空载工况进行换挡规律设计,将其作为挡位决策的依据。实车测试开始时,车辆处于半载荷静止状态,此时车辆质量约为15 500 kg。车辆从静止开始加速行驶,整个过程持续约45 s。车辆加速过程中,变速器挡位从1挡逐渐升至3挡,换挡点为A1和B1,对应车速分别为22.8 km/h和43.1 km/h。如果车辆无法识别载荷,按照预先设定的空载换挡规律进行挡位决策,则车辆加速过程中在A0、B0点达到升挡临界值。与空载工况换挡点对应车速相比,半载荷工况下,换挡点对应车速出现一定延后,这是因为实车控制器中采用文本设计的线性插值法根据车辆动态载荷对换挡点进行动态修正,进而提高车辆对实际载荷变化的适应能力。随着载荷增大,换挡点对应车速增大,不仅可增大车辆低挡位运行时间,提高车辆动力性,且能够避免意外换挡现象发生。
为验证本文提出的基于道路坡度辨识的换挡规律修正方法的有效性,选择目标试验车辆进行了实车道路试验,试验结果如图10 所示。首先针对试验车辆平路工况进行换挡规律设计,并将其作为挡位决策的依据。实车测试开始时,车辆在平路处于半载荷静止状态,质量约为15 500 kg。车辆从静止开始加速行驶,第8 s 时刻车辆开始进入坡道,整个爬坡工况持续约20 s。车辆爬坡过程中,变速器挡位从1挡升至2挡,换挡点为C1,对应车速为24.9 km/h。若车辆无法识别道路坡度,按照预先设定的平路工况换挡规律进行挡位决策,则在C0点达到升挡临界值。与平路工况换挡点对应车速相比,车辆爬坡工况下,换挡点对应车速出现一定的延后,这是因为实车控制器中采用文本设计的线性插值法实现根据道路坡度对换挡点的动态修正,提高车辆对道路坡度变化的适应能力。随着道路坡度的增大,换挡点对应车速增大,不仅可增大车辆低挡位运行时间,提高车辆动力性,且能够避免意外换挡现象的发生。
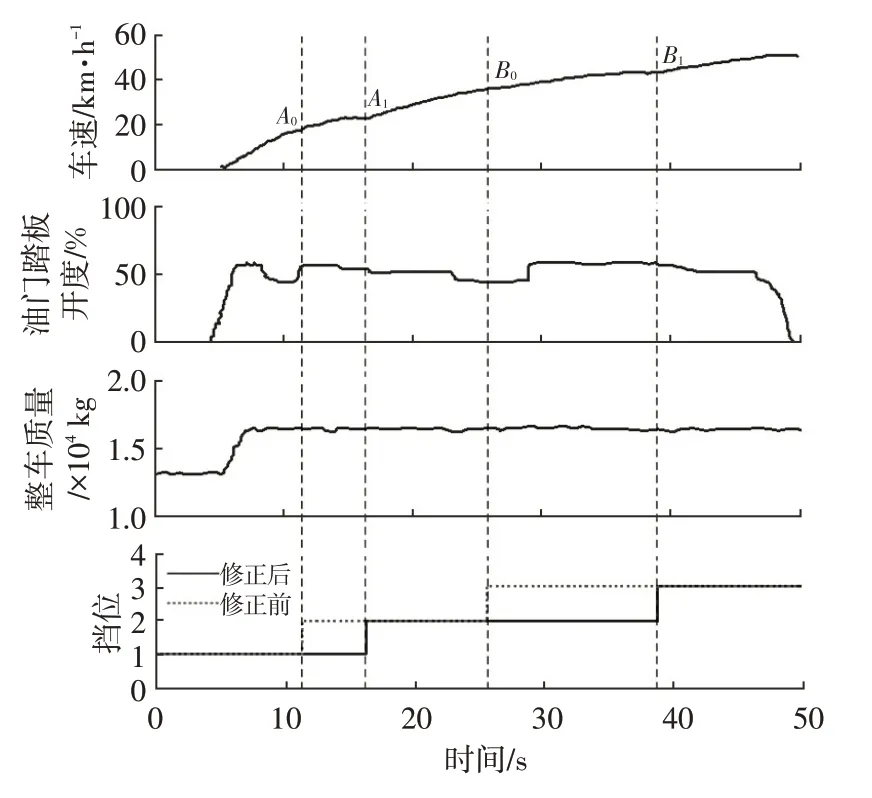
图9 载荷换挡策略试验验证

图10 道路坡度换挡策略试验验证
6 结束语
本文针对车辆控制系统难以实时准确测量整车质量和道路坡度的问题,基于车辆纵向动力学方程,运用无迹卡尔曼滤波算法设计了整车质量和道路坡度联合估计算法,并根据车辆载荷及道路坡度辨识实时结果,采用线性插值法实现了电动汽车换挡规律的动态修正。联合估计算法对质量和道路坡度的估计时间滞后较小,最大估计误差均小于1%,算法收敛速度快、精度高。采用本文提出的自适应换挡策略可根据实际车辆载荷或道路坡度选择最佳挡位,算法简单,便于工程应用,且能有效避免车辆因载荷或道路坡度变化带来的意外换挡问题,提高车辆对行驶环境的适应能力。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07 03:47:42
城市道桥与防洪(2019年5期)2019-06-26 00:56:04
上海师范大学学报·自然科学版(2018年3期)2018-05-14 13:47:10
汽车维修技师(2017年6期)2017-11-18 06:01:49
广西科技大学学报(2016年1期)2016-06-22 13:10:38
电气化铁道(2016年4期)2016-04-16 05:59:46
实用手外科杂志(2015年4期)2015-08-27 01:54:08
河北遥感(2015年2期)2015-07-18 11:11:14
医学研究杂志(2015年4期)2015-06-10 06:42:43
汽车维护与修理(2015年5期)2015-02-28 12:16:30
