基于北斗卫星的调车机车跟踪监控系统研究
2019-12-11 06:20胡亚峰
铁路通信信号工程技术 2019年11期
胡亚峰
(北京全路通信信号研究设计院集团有限公司,北京 100070)
1 概述
铁路调车机车(调机)是专用于铁路车站进行列车编组、解体作业和牵出、转线等工作的机车。调机作业是铁路运输生产重要的组成部分,涉及机车、车辆、人员等诸多要素,需要调车班组、调度员与机车司机等多工种协调配合。调车作业频繁起动与停车,伴随较大的起动加速度与频繁的位置移动,具有点多面广、随机性强的特点。为合理地编制调车计划及对作业结果进行统计分析优化,铁路运输部门需要掌握调机的实时作业位置与历史作业轨迹。
运输部门需要实时掌控的调车位置包括车站与专用线。专用线往往未配备信号设备,无法对调机定位,只能由司机通过对讲机向调度员上报粗略位置,准确性与实时性无法得到保证。当前部分重点车站装设无线调车机车信号和监控(STP)系统。该系统利用地面控制主机和车载控制设备,对联锁及应答器数据进行处理,通过车地无线通信技术,实现站内各类调机的位置跟踪,并通过车载主机向列车运行监控装置(LKJ)发送控制命令的方式实现一定程度的安全防护。该系统可以得到调机占用的实时进路位置,但无法获取更精细的点位置,也无法适用于专用线。通过技术手段实时掌控调机的动态信息,一直是铁路运输部门亟需解决的问题。随着计算技术、传感技术和通信技术的不断发展,研制智能化的调机跟踪监控系统已具有可行性。
北斗卫星导航系统是我国自主建设的卫星导航系统,已在国民经济重大领域发挥了重要作用,其安全、自主、可靠的特点适合铁路系统应用。通过建设北斗差分基准站及车载台,并在站内道岔遮挡区域以应答器作为辅助手段,可为调机提供高精度的位置服务,符合我国铁路运输智能化发展趋势及国家战略需求。
本文结合北京全路通信信号研究设计院集团有限公司在该领域的研究成果与系统产品,介绍系统总体结构和功能组成,详细研究若干关键问题,并对应用效果进行了分析。
2 设计目标
基于北斗卫星的调车机车跟踪监控系统以GSM-R/公网4G/北斗短报文融合通信实现车-地双向传输,以北斗卫星为主、车载里程计与应答器为辅实现高精度的机车定位,为铁路站场及专用线的调机作业提供可靠的管控支撑平台。
本系统设计应遵循精确性、可靠性、连续性、可用性与完好性原则。尽管当前北斗二代系统卫星数量已足够保证达到较高的定位性能,但为提高精确性与可靠性,本系统采用北斗与GPS双模冗余组合定位。为保证定位过程的连续性,系统采用组合导航技术,在道岔遮挡区域设置应答器。本系统在地面不设置通信基站,而是充分利用铁路沿线的既有通信网络。为提高可用性与完好性,本系统将GSM-R、公网4G与北斗短报文3种通信方式在车载端与中心端两侧分别进行融合。
3 系统结构与功能
3.1 系统结构
本系统部署于车站与调机,由中心子系统、基准站子系统、车载子系统与应答器等4部分构成,如图1所示。

图1 调车机车跟踪监控系统架构Fig.1 Tracking and monitoring system architecture of shunting locomotives
中心子系统是信息汇聚与处理中心,由数据库服务器、总线服务器、应用服务器、差分服务器、北斗指挥机、管理终端、网络设备与信息安全设备等构成。数据库服务器负责本系统核心数据的存取,保证数据完整性、逻辑一致性及数据查询的灵活性与高效性。总线服务器对系统各设备的状态和消息进行管理,实现链路管理与消息分发功能。应用服务器承载本系统核心业务的处理功能,包括定位数据处理、地图匹配、作业智能分析、故障检测等。差分服务器接收各基准站的差分观测数据,并实时转发至车载子系统。北斗指挥机实现中心与调机之间的双向短报文收发。
基准站子系统由接收机、基站服务器、天线及馈线、UPS电源、防雷设备、机柜、天线杆、观测墩以及基准站控制软件组成,为中心子系统提供实时差分数据。为保证连续可用性,基准站子系统设计为双基准站热备份的方式,即部署两台接收机同时工作,一主一备,当主接收机出现故障不能工作,立即实时切换到备用接收机。
车载子系统主要由车载主机、天线、支架及车载软件组成,实现高精度差分解算,并与中心子系统业务互动。车载主机包括高精度定位板卡、主控板、GSM-R/4G通信模块、北斗报文通信模块、电源及主机箱;天线包括北斗卫星天线、4G天线及馈线。车载子系统安装于调机上,其中主机安装于机车头部弱电柜内,北斗卫星天线与4G天线安装于机车前侧上方。
3.2 系统功能
本系统主要功能包括调机轨迹实时跟踪、调机状态实时监控、调机作业智能分析、调机轨迹回放与基础信息管理等5部分。
对于调机轨迹实时跟踪,中心子系统实时接收车载子系统上报的高精度位置信息,经过滤波与定位处理后,得到当前调机的真实位置信息。系统以铁路电子地图为背景,实时显示管辖范围内在线调机轨迹信息。电子地图数据支持铁路车站、轨道、道岔、专用线等基础图形元素的离线制作,支持放大、缩小、拉框放大、拉框缩小等基本操作。电子地图提供比例尺显示、图层控制、浮动工具栏等扩展功能。用户通过鼠标操作自动计算距离与区域面积,可实现铁路线路图、行政区划图、卫星图的切换与融合显示。
对于调机状态实时监控,中心子系统接收和分析原始调机状态信息,实时显示调机的上下线、速度、当前所在车站、当前占用设备、当前实时里程位置等状态信息。系统以不同颜色标识调机的上下线信息,以仪表盘方式实时显示调机的运行速度信息,以文本方式动态显示调机的所在车站、当前占用的线路设备、当前实时精确里程位置等信息。
对于调机作业智能分析,系统全程记录调车机作业位置、作业内容、作业进度、运行速度、加减速信息、进出关键位置点信息,准确定位影响运输效率的作业环节。在此基础上,系统对作业范围均衡性与分布合理性进行评估,以充分发挥和提升调机的运用效率,完善运输生产布局。
对于调机轨迹回放,系统根据用户选定的调机,在给定起止时间范围内查找在线记录和历史轨迹,并在电子地图中动态播放。轨迹以不同颜色的曲线形式展示,且电子地图的边界随调机位置变化而变化。
对于基础信息管理,系统可进行查询、增删、修改、同步与合法性检测等操作。本系统的基础信息包括电子地图、调机、铁路单位及用户。
4 关键问题研究
4.1 铁路线路建模技术
铁路线路的平面图由道岔与无岔设备构成,其中无岔设备包括股道、专用线、闭塞分区、走行线、牵出线、安全线与禁溜线等。道岔由岔前、定位与反位3条线段组成,无岔由直线、圆曲线及缓和曲线等规则曲线组成,且曲线半径较大。当曲线上两个定位点距离较近时,两点间的曲线路段可近似视为1条直线。在满足一定精度条件约束下,任意线路都可由前后衔接的离散点序列分段拟合而成。本系统设置的精度为0.2 m,即拟合后的线路与原始线路最大距离不超过0.2 m。
本系统的铁路线路建模过程共可分为5步,如图2所示。对于原始数据采集,其来源主要为车载子系统的高精度定位数据,对于遮挡或调机不常途径区域则以人工测量为主。在预处理阶段,系统通过多种滤波算法检测和删除原始数据中的野值点,并对数据中的噪音进行平滑处理。在线路拟合阶段,系统对原始数据分段拟合,迭代计算得到最优的拟合点与拟合参数。在数据融合与校验阶段,系统根据各线路区段前后的衔接关系及相邻线路的最小距离约束,识别出拟合结果中的潜在风险,并对同一线路不同时段的采集拟合结果融合处理。最后,通过电子地图工具对拟合结果编码打包,完成地图数据的更新发布。

图2 铁路线路建模流程Fig.2 Railway line modeling procedure
4.2 基于北斗卫星的安全定位技术
基于北斗的安全定位技术以北斗高精度定位数据为主,车载里程计速度数据为辅的定位系统。在遇到隧道、山体、建筑物遮挡等卫星可见度低的情况下,里程计可保证实现连续的调机定位。应答器主要用于站内遮挡的道岔区段,因其数量少,且可近似认为是绝对位置,因此在定位算法里暂不描述。
综合考虑调机定位的精度需求、实施成本及器件可靠性要求,本系统采用RTD差分,水平精度为40 cm。对照安全完整性SIL4级要求,要实现间距4 m的相邻股道的误判率低于10-9,仅凭单次定位数据显然不够,必须比较连续多次定位数值的一致性。
定位算法可分为滤波、初始定位、运行定位与故障识别4个模块,如图3所示。在滤波阶段,以卫星定位经纬度、卫星定位速度、里程计速度为观测变量,构建调机运动的状态方程与观测方程,应用Kalman滤波算法来实现调机地理位置的误差控制与优化估计。初始定位用于调机起动或由遮挡区域进入卫星区域,其不仅要确保电子地图匹配结果的可靠性,还要验证卫星定位数据与里程计数据的吻合度。连续定位用于起始位置确定之后,系统根据卫星定位信息与里程计速度信息连续计算位置。定位过程依据地图匹配技术,将调机轨迹与电子地图中的道路信息相比较,通过高效可靠的匹配算法确定调机最可能的行驶路段及在此路段最可能的位置。在初始定位与连续定位阶段,系统要根据多个连续的定位数据来确保安全性,定位数据的时间长度取决于定位数据的时间相关性及定位可靠性指标。故障识别模块用于检测各类异常情况,比如里程计的空转与滑行、卫星观测数量的突变、卫星信号强度过低、差分龄期过大等。
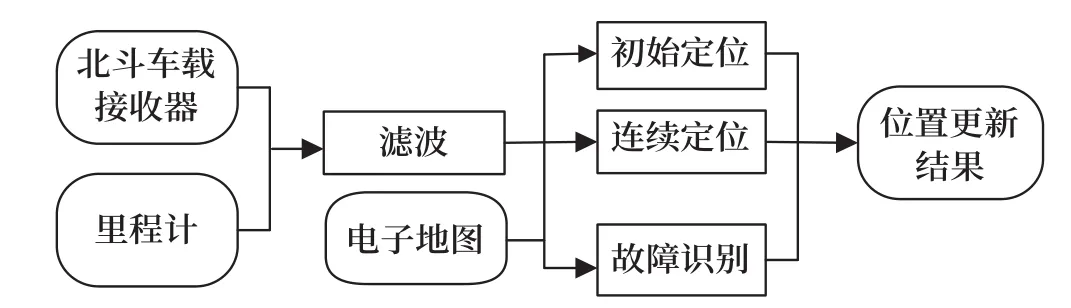
图3 调机安全定位流程Fig.3 Secure localization process of shunting locomotives
4.3 综合通信技术
本系统不需自建通信基站,而是充分利用铁路沿线的既有通信设施。分析本项目的车地双向通信带宽需求,GSM-R足够承载,因此在GSM-R覆盖区段优先采用该方式。在GSM-R尚未覆盖的区域,公网4G是首选通信技术手段。此外,对于既无GSM-R基站也无公网运营商基站的区域,基于北斗卫星的短报文通信成为首选。本项目综合通信功能需在车载段与中心端同步实现。
车载子系统的GSM-R、4G与北斗短报文都通过模块实现,其硬件设计主要指主控板与模块之间的数据通路以及信令接口的设计。GSM-R与4G考虑兼容设计,共用天线;北斗报文模块单独设置天线。主控板自动检测各通道的连接情况并按设定规则自动切换。
中心端设置北斗指挥机,负责收发短报文,并将短报文转换为标准的TCP内部数据包。系统关键业务的数据通信协议同步支持TCP与短报文两种格式,并在特征码、内容与长度上保持一致。
4.4 运输能力智能分析技术
运输能力分析是铁路运输的一项重要工作,各车务段与车站应能及时查定和计算现有条件下所能承担的最大接发车和解编作业能力,及时发现车站运输组织中的薄弱环节,科学编制运输组织方案,最大限度发挥车站的作业能力。
本系统融合调机轨迹信息与调车作业计划信息,实现作业过程的全程匹配,进而实现站场内各类调机作业的信息汇总与分析。同时,系统对调机运动过程数据进行分析,提取起动、加减速、停机等关键时间点,计算实际运行速度与限速值之间的差值,为分析和提高车站解编作业效率提供支持。
5 应用分析
基于北斗卫星的调机跟踪监控系统在沈阳铁路局沈阳东站实施。沈阳东站为一等站,管辖范围直径超过10 km。全站含26条股道,55条专用线,140组道岔及256条其他无岔设备,如图4所示。因全站无道岔遮挡区域,因此不在地面加设应答器。因全站范围内公网4G信号覆盖良好,且该区段无GSM-R信号,因此车地通信方式只选择公网4G。采用差分基站提供差分数据的高精度定位方式。

图4 沈阳东站线路结构Fig.4 Line structure of Shenyang East station
中心子系统布设于云服务器上,包括数据库服务器、应用服务器、总线服务器、差分服务器及防火墙等应用软件
地面设备为安装于车站主楼西侧的差分基准站,如图5所示。该基站采用双接收机双天线冗余设计,每秒向中心子系统发送一次差分数据包,再由中心子系统将差分信息发送给在线调机的车载设备,以提高调机定位精度。

图5 差分基准站卫星天线与机柜Fig.5 Satellite antenna and cabinet of differential reference station
车载设备包括主机与天线,其中天线包含卫星天线与4G通信天线,结构如图6所示。车载设备接收卫星数据与差分数据,完成高精度位置解算,并将调机位置信息、状态信息等经4G无线网络传输至中心子系统;车载子系统接收和响应中心子系统的相关指令,并返回执行结果。沈阳东站用于作业的3台调机HXN3B-0125、HXN3B-0126与HXN3B-0127皆安装该车载设备。

图6 车载天线与主机Fig.6 Onboard antenna and host
本系统自2018年6月实施以来,已稳定运行1年有余,给铁路运输部门掌握调机动态及生产布局优化提供了支撑平台。中心子系统监控界面的调机实时位置展示如图7所示。
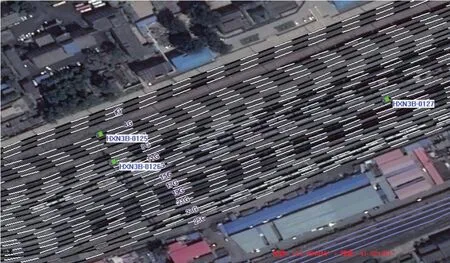
图7 中心子系统主监控界面Fig.7 Main monitoring interface of central subsystem
对调机HXN3B-0125随机选取一段长为4 h的数据进行分析,观察其卫星数变化与定位误差变化情况,如图8所示。从图8可以看出接收器收到的卫星数都在12颗以上,且大部分时间都在18颗以上,满足高精度定位的要求。以现有电子地图与定位算法为基础,将高精度原始位置结果匹配到铁路线路上,得到匹配点与原始点之间的距离,即为定位误差。由图8可以看出,定位误差的最大值为0.6 m,方差为0.07 m,可用性100%,满足应用精度与可用性指标要求。
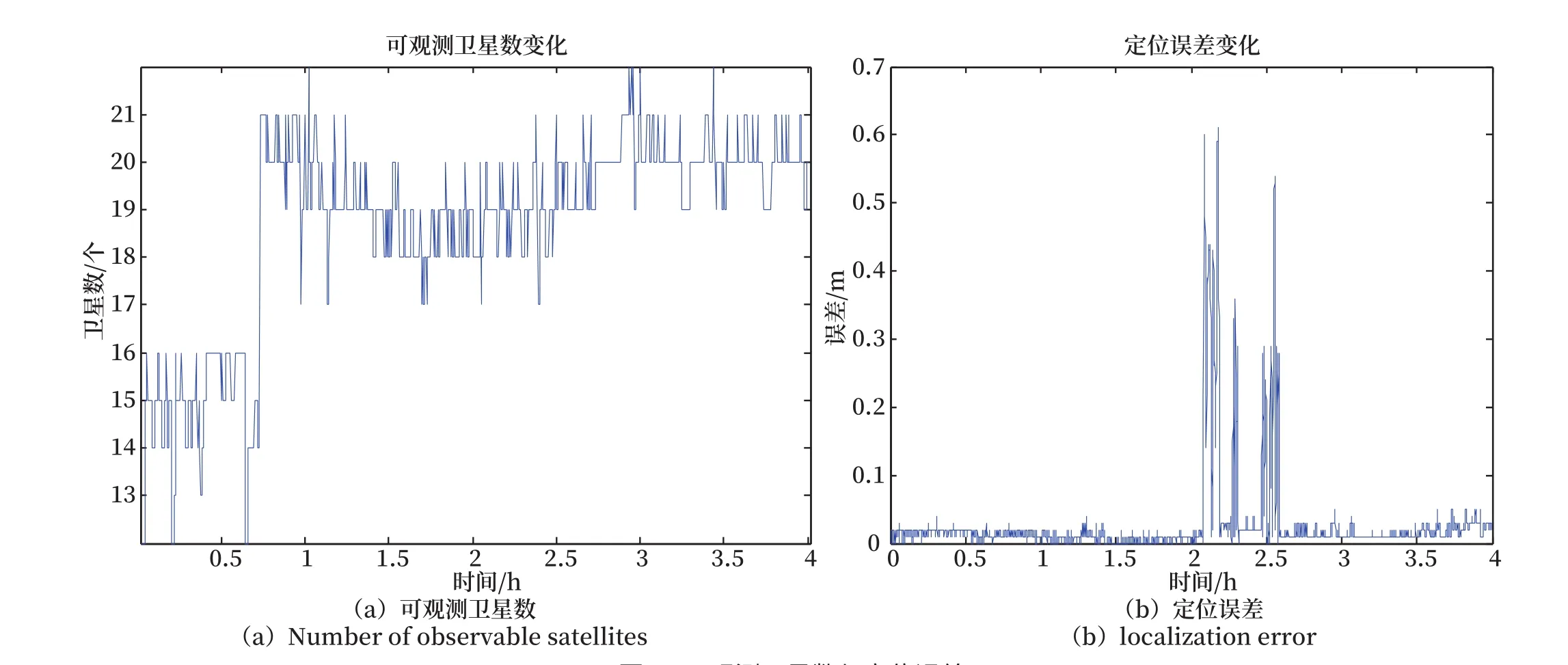
图8 可观测卫星数与定位误差Fig.8 Number of observable satellites and localization error
6 结束语
实时准确地掌握调机轨迹信息,是当前铁路运输部门亟需解决的问题之一。本文结合北京全路通信信号研究设计院集团有限公司研究成果,介绍基于北斗卫星的调机跟踪监控系统总体结构和功能组成,详细分析其中几个关键问题,并对现场应用情况进行分析。需要指出的是,本文所涉及的安全定位技术还需从理论上进一步严密论证其精确性与可靠性。随着北斗卫星导航系统的日益完善,以北斗卫星定位为主,多传感器融合定位模式将在轨道交通各领域迎来广阔的应用前景。
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
汽车实用技术(2022年10期)2022-06-09
铁道通信信号(2021年9期)2021-10-19
新世纪智能(数学备考)(2021年5期)2021-07-28
铁道建筑技术(2021年3期)2021-07-21
上海铁道增刊(2021年2期)2021-02-14
铁道通信信号(2020年4期)2020-09-21
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19