基于TAG定位的列车自动驾驶系统应用研究
2019-12-11 06:20陈志强葛鹭明李玲玉
铁路通信信号工程技术 2019年11期
王 鹏,陈志强,葛鹭明,李玲玉
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070;3.中车长春轨道客车股份有限公司国家轨道客车系统集成工程技术研究中心,长春 130052)
1 概述
近年来随着轨道交通的快速发展,列车自动驾驶(ATO)技术研究的越来越深入与普及。目前国内城市轨道交通以具备ATO功能的基于通信的列控系统(CBTC)为主,并已于各大城市普遍应用;国内干线铁路方面,莞惠C2+ATO开创了城际铁路附加ATO功能的先河,并已安全高效运营3年;2018年的京沈试验的成功验收也标志着ATO成功引入高铁。
然而对于既有干线铁路客运、货运线路、地铁或国外普速铁路线路,增加ATO功能同样势在必行,若采用CBTC、城际、高铁ATO方案对既有系统升级改造,则新增设备与接口较多,维护维修难度很大。对此本文提出了一种基于TAG定位的轻量级ATO系统升级方案。
2 基于TAG定位的ATO系统
2.1 系统结构
基于电子信标(TAG)定位的ATO系统无严格的标准结构,是在原有列控系统基础上,增加车载ATO单元、无线电台及配套设备、TAG读取器及配套设备,地面设备增加车站自动驾驶设备(车站ATO),轨旁设备增加TAG,其他既有设备功能及接口维持不变。典型的基于TAG定位的列控系统结构如图1所示。

图1 基于TAG定位的轻量级列控系统Fig.1 Lightweight train control system based on TAG positioning
地面设备主要包括调度中心、继电/计算机联锁、车站ATO。调度中心主要承担行车调度指挥、分散自律功能,联锁主要承担进路选排、信号控制、转辙机控制、空闲检查等功能,车站ATO设备为新增设备,用于通过车地无线通信向车载ATO发送运行计划相关信息。
轨旁既有设备包括信号机、轨道电路、转辙机,功能与接口维持既有不变,新增无源TAG,车载ATO通过接收其报文获取站台出入口位置、停车点位置等信息,以实现进站减速及精确停车等功能。
车载设备主要包括车载ATP、车载ATO、车载DMI,车载ATP通过接受轨道码实现速度防护逻辑,并通过列车接口单元对车辆进行紧急制动、切除牵引、驻车制动等操作,防止列车超速、冒进或溜车。车载ATO通过车地通信获取运行等级限速,通过TAG获取停车点位置及站台限速等信息,在ATP速度防护下控制列车牵引制动及精确停车。车载DMI用于显示列车速度、列车限速、跳停、扣车等信息,供司机监测。
2.2 车地通信
2.2.1 车地通信内容
车地通信在本系统中仅为ATO功能,用于运行计划调整,其通信内容非安全信息,地面的控制命令主要包括:运行等级、开关门命令、站停时间、期望停车阶段减速率、跳停、扣车。
其中跳停、扣车命令、开关门命令、站停时间等仅在此站有效,来源于调度员的设置;运行等级有效范围为此站出站到下一站进站前,是车站ATO根据各个列车到达本站的时刻表以及发车时刻表,计算前后两车的行驶时间间隔,然后根据本站与下一个车站的距离间隔,计算每辆列车应行驶在两站之间的平均速度,以此推算而来。
2.2.2 车地通信过程
此系统车地通信于列车进站前一定距离建立,出站后一定距离中断,且总是由车站ATO发起,车载ATO被动接收。车站ATO发送的信息帧包括:请求帧(HELLO)、轮询帧(POLL)、控制帧(CONTROL),车载ATO回应的信息帧包括:应答帧(ACK)、说明帧(IDC),车地通信的整体流程如图2所示。
1)车站ATO广播发送HELLO信息帧。
2)若列车处于通信范围内,车载ATO回复ACK信息;若列车不处于通信范围内,车载ATO不做回应。
3)车站ATO通过接收到的ACK信息,获取列车识别号,并发送POLL信息。
4)车载ATO接收POLL信息后,判断其报文中列车识别号、车站号是否正确,若正确则回复INDICATION信息,汇报自身运行状态,车载ATO认为车地建链完成;否则重发一次INDICATION信息。
5)车站ATO接收到INDCATION信息后,向车载ATO周期发送包括控制命令的CONTROL信息。
6)车载ATO接收到CONTROL信息后,判断其报文中列车识别号、车站号是否正确,若报文合法则回复ACK信息,若超过规定时间未收到CONTROL信息,则重发ACK信息。
7)当列车驶离通信范围,车载ATO停止回复任何信息,中断车地链接。
当车地建链完成后,若列车接收到车站号、列车识别码不正确的控制报文后,不做回应,且不采信其报文内容,直至接收到正确的车站号、列车识别码的控制报文。车地通信中断的方式为车载不再回复地面信息从而超时断链,或列车驶离通信区域从而通信中断。
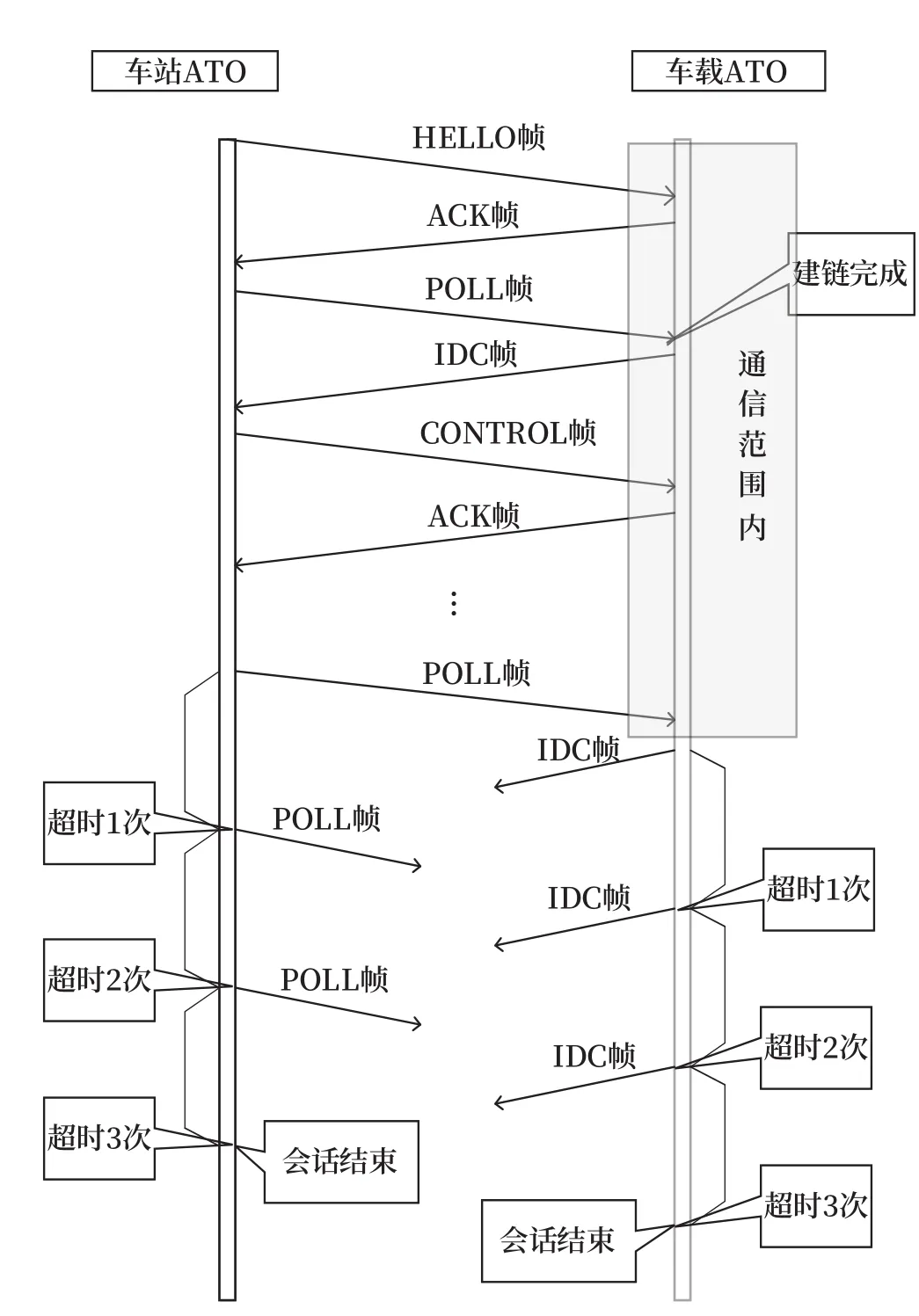
图2 车地通信时序图Fig.2 Train-trackside communication time sequence diagram
2.3 TAG定位方案
基于TAG定位的自动驾驶系统主要依靠电子标签获取目标点位置信息以及判断列车方向,TAG是一种射频供电,应用于915 MHz频率的轨旁定位设备,较应答器具备更小的体积、更低的辐射功率、更强的抗干扰性、且无需内置电源。
2.3.1 TAG部署
在本列控系统中,TAG设置于每站站内、进站出站口外一定距离,且每站TAG的布置顺序及ID号相同。TAG的安装位置如图3所示。
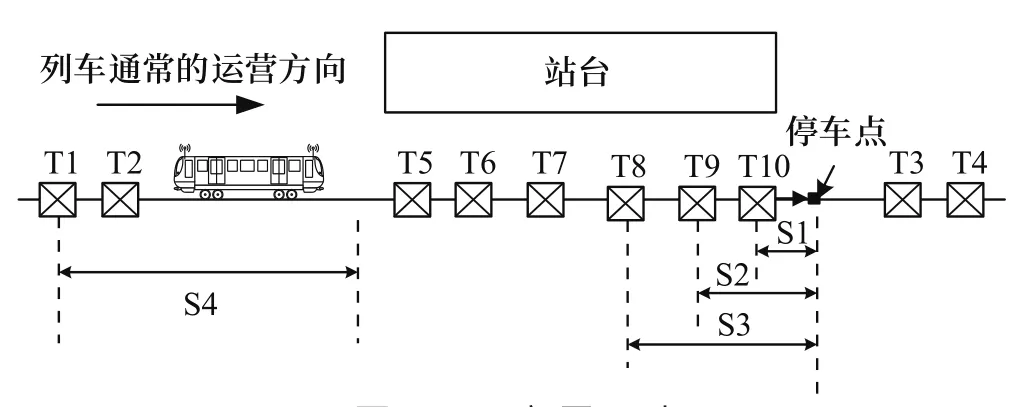
图3 TAG部署原则Fig.3 TAG deployment principle
本系统中分3类TAG,分别为进站TAG、精确停车TAG和换线TAG,进站TAG的编号为1~4,位于进站口出站口外固定距离;精确停车TAG编号为5~10,于站台内对称分布;转线TAG编号为11,位于站台咽喉区。
若定义线路通常的运营方向为正向,则无论上下行,TAG安装均采用正向安装,即依次为进站T1、T2,精确停车T5~T10,出站T3、T4。
2.3.2 TAG校验
当列车经过某一TAG时,车载ATO进行一致性检查、链接距离检查、ID顺序检查,并根据检查结果汇报相应故障。
一致性检查面向T1~T10,主要针对报文内容合法性进行检查,具体包括:对于先后经过的同一站两个TAG,描述的车站、线路编号、开门侧、停车点位置、到达站台入口位置、站台限速等信息应当相同。一致性校验用于保证停车点、目标点等信息不回突变。
链接距离检查面向T1~T10,主要对先后经过的两个电子信标的间距进行检查,判断相邻两个TAG间的理论安装距离与实际走行距离的偏差是否满足一定误差范围要求。链接距离检查用于检测测速测距精度是否满足要求。
ID顺序检查面向T1~T10,主要对依次经过电子信标的编号顺序进行检查,防止方向跳转的情况发生。ID顺序检查用于检测是否丢失TAG。
2.3.3 方向判断
TAG中相同含义的信息通常存在于两个字段,分别用于列车正向和反向运行。列车方向的判断是根据经过TAG的顺序决定,具体为:
1)当列车依次经过的TAG标号递增,如T1→T2、T5→T10、T3→T4的顺序,则定义为正向,当列车依次经过的TAG标号递减,如T4→T3、T10→T5、T2→T1的顺序,则定义为反向。
2)若在已确定方向的情况下,TAG标号递增递减情况突变,则丢失方向,等待下个TAG重新确定方向。
3)当列车经过T11后,则丢失方向,等待下个TAG重新确定方向。
2.3.4 目标点计算
当列车经过某个TAG完成方向判断及TAG校验后,可以使用其报文信息计算停车点或站台出入口位置。
为便于TAG报文数据管理与配置,每车站TAG安装位置及报文配置相同,因此表示位置的信息实际配置的是距离信息。信标报文中的停车点、站台入口、站台出口字段含义并非指停车点、站台入口、站台出口的实际公里标,而是指距停车点、目标点的距离,因此车载ATO需要将距离信息转化为位置信息使用。
停车点校位或目标点校位的算法为:

其中KP表示停车点位置或目标点位置,s表示列车首次收到电子信标报文那一周期的位置,该位置来源于测速测距单元,即从列车上电时算起的累积位移,这个列车位置在每个列车周期都会计算,l表示报文中此电子信标到达站台入口或站台出口的距离字段,Δ t表示从列车接收射频数据到使用射频数据的平均延时,v表示列车首次收到电子信标报文那一周期的速度,D表示电子信标接收窗范围大小,周期为车载ATO主控逻辑周期,即车载ATO每100 ms进行一次报文读取并计算。
3 发展与展望
基于TAG定位的列控系统结构简单,增加ATO功能对既有系统变动较少,适用于运营效率不高线路增加ATO功能的升级改造。此系统已在巴西圣保罗CPTM十一、十二号线成功投入使用,对我国货运、既有普速铁路、部分地铁城轨的增加ATO功能升级改造具有指导意义。
猜你喜欢
制冷与空调(2022年2期)2022-06-01
广东通信技术(2022年3期)2022-04-25
中国科技纵横(2020年5期)2020-06-29
铁道通信信号(2020年8期)2020-02-06
移动信息(2018年10期)2018-11-04
祖国(2018年6期)2018-06-27
阅读(科学探秘)(2018年8期)2018-05-14
科技传播(2017年23期)2018-01-10
发明与创新(2016年17期)2016-12-22
发明与创新·大科技(2016年5期)2016-05-17