基于ETCS的ATO系统工作模式研究
2019-12-11 06:20徐效宁李一楠程林芳赵东旭
铁路通信信号工程技术 2019年11期
徐效宁,李一楠,程林芳,赵东旭
(1.中国铁道科学研究院集团有限公司通信信号研究所,北京 100081;2.国家铁路智能运输系统工程技术研究中心,北京 100081)
列车自动驾驶技术作为智能铁路的重要组成部分,可以降低司机的劳动强度,提高运输效率,实现节能控制,是未来铁路的一个重要发展方向[1]。2016年3月,城际CTCS2+ATO列控系统在珠三角城际铁路商业运用,在世界范围内首次实现时速200 km线路的自动驾驶技术。同时,国内高速铁路ATO系统也已完成现场测试并在京沈高铁试用,未来也将运用于智能京张高铁[2]。
近年来,欧洲铁路部门面向干线铁路,提出了基于欧洲列车运行控制系统(ETCS)的ATO系统(ATO over ETCS)。为实现互联互通,基于ETCS的ATO系统定义了不同的工作模式,本文主要对各种模式的定义和转换条件进行研究。
1 基于ETCS的ATO系统介绍
1.1 研究背景
基于ETCS的ATO系统研究可以分为3个阶段:泛欧交通运输网(TEN-T)、下一代列车运行控制系统(NGTC)和“转移至铁路”(Shift2Rail)项目,如图1所示[3-4]。
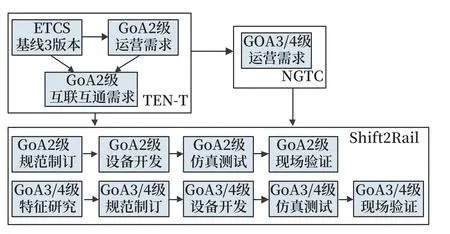
图1 基于ETCS的ATO系统开发路线Fig.1 Development route of ATO over ETCS
TEN-T项目研究了干线铁路实现自动驾驶的可行性,在ETCS基线3版本的基础上提出了自动化等级(GoA)2级的运营需求。NGTC项目则根据ATO在城市轨道交通的运用经验,提出了GoA3和GoA4级的运营需求。Shift2Rail项目的“先进的运输管理和控制系统”正式开始基于ETCS的ATO系统研发,最终目标是在城市轨道交通和市郊铁路实现GoA4级、货运等其他线路至少达到GoA2级的自动驾驶功能,目前项目主要集中于GoA2级的规范制定和设备开发阶段。
2018年底,ETCS2+ATO系统在英国伦敦的泰晤士联线中商业运用。由于基于ETCS的ATO系统相关规范细则尚未完全确定,因此泰晤士联线的ETCS2+ATO系统在设计时更多的参考了城市轨道交通CBTC的架构设计[5]。
1.2 体系架构
如图2所示,在ETCS的基础上,系统增加了单独的ATO车载和ATO地面设备,以实现自动驾驶相关功能[6]。同时,欧洲铁路部门通过SUBSET-125等一系列规范文件,要求不同信号厂商的ATO车载和地面设备、ATO车载和ETCS车载设备(ATP)能够实现互联互通,便于既有设备的升级改造以及提高市场的竞争力[7]。
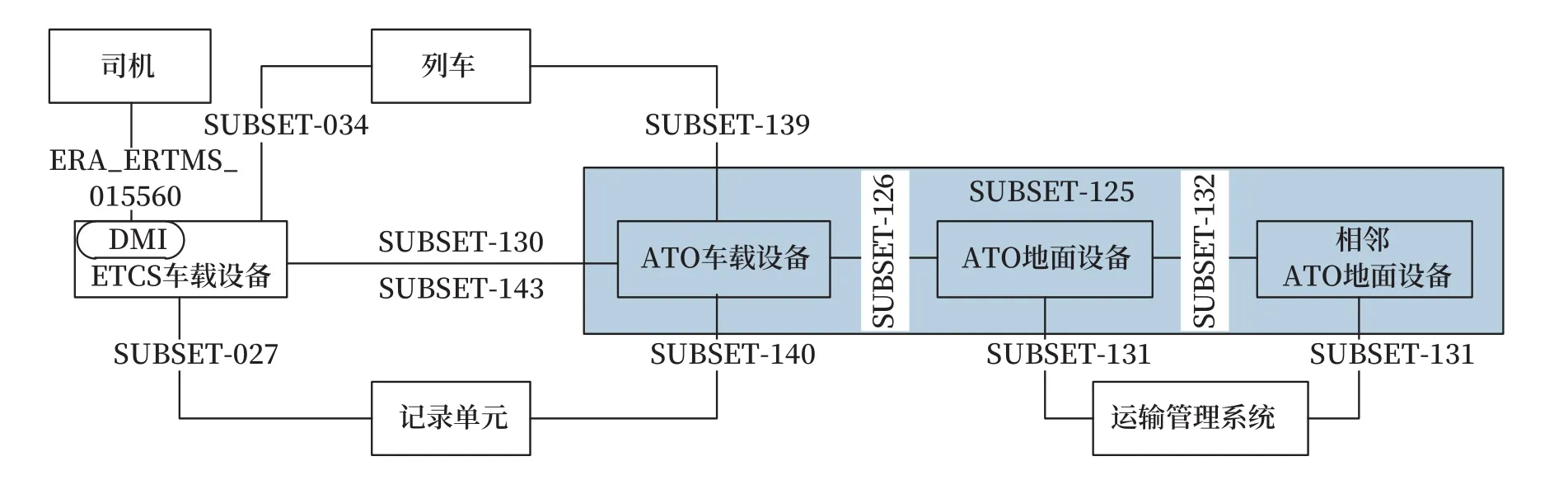
图2 基于ETCS的ATO系统参考架构Fig.2 ATO over ETCS reference architecture
2 ATO工作模式分析
2.1 ATO控车条件
基于ETCS的ATO系统细化了ATO控车所需的条件,将其分为“ATO可用条件”和“ATO启动条件”。当满足不同的条件时,ATO设备处于不同的工作模式,DMI向司机显示对应的图标。
“ATO可用条件”包括如下内容:
1)ATP允许ATO控车;
2)司机或其他系统未输出紧急制动;
3)线路数据和运行计划有效;
4)列车未处于ATO禁止运行区域[8];
5)ATO控车所需的ETCS数据有效。
其中,ATP允许ATO控车的条件包括:1)设备处于自动驾驶(AD)或完全监控(FS)模式,并且DMI不再显示“进入完全监控模式”(即列车完全进入线路数据描述的区段);2)设备未输出紧急或最大常用制动。
“ATO启动条件”包括如下内容:
1)方向手柄处于前进位;
2)如果列车停在站内,行车许可的长度至少保证列车完全驶离站台;
3)如果列车停在站外,行车许可的长度至少保证列车能够移动(移动最小距离可根据列车配置);
4)当列车接近停车点时,剩余距离保证ATO能够停车;
5)车门关闭且锁闭(仅对于旅客列车);
6)发车倒计时结束(如果有)。
2.2 ATO工作模式
参考ETCS系统需求规范,ATO系统定义了8种工作模式对应不同的运用场景,这也有利于区分人机职责[9]。
1) ATO未上电模式(ATO No Power,NP)
未上电时,ATO设备处于NP模式。该模式下,ATO不负责列车运行。
2) ATO 配 置 模 式(ATO Configuration,CO)
上电后,ATO设备进入CO模式,同时向ATP发送ETCS数据请求。该模式下,ATO不负责列车运行。
3) ATO不可用模式(ATO Not Available,NA)
ATO设备等待具备“ATO可用条件”。该模式下,ATO不负责列车运行。
4) ATO可用模式(ATO Available,AV)
ATO设备具备“ATO可用条件”,等待“ATO启动条件”满足。该模式下,ATO不负责列车运行。
5) ATO准备模式(ATO Ready,RE)
ATO设备具备“ATO可用条件”和“ATO启动条件”,等待司机启用ATO控车。只有当控制手柄位于牵引或中立位,ATO才能启用。该模式下,ATO仍不负责列车运行,司机负责启用ATO控车。
6) ATO启用模式(ATO Engaged,EG)
该模式下,ATO负责控制列车运行。
7) ATO退出模式(ATO Disengaging,DE)
在EG模式时,若ATP允许ATO控车而其他“ATO可用条件”不再具备,ATO设备将进入DE模式。进入DE模式后,ATO设备仍使用上一次计算的曲线控车,但不再输出牵引制令;如果5 s内“ATO可用条件”重新满足,ATO设备恢复为EG模式,否则5 s后将输出最大常用制动。
8) ATO失效模式(ATO Failure,FA)
当检测到不能执行自动驾驶相关功能的故障时,ATO设备将进入该模式。
3 工作模式转换
3.1 ATO模式转换
ATO模式转换如图3所示。图中“1>”表示当条件“1”满足时,系统转换到箭头“>”指向的模式。为避免不同条件同时满足发生模式转换冲突,每个转换条件都被分配了一定的优先级。优先级用“-px-”表示,当x数值越小时优先等级越高。图3中的“6b,8,10”表示“条件6b或者条件8或者条件10”,即只要满足其中一个条件就进行模式转换。
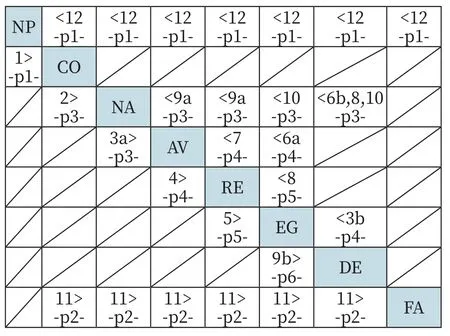
图3 模式转换图Fig.3 Mode transition diagram
模式转换条件如表1所示。
3.2 ETCS模式转换
为适应ATO系统功能需求,ETCS在基线3版本的基础上增加自动驾驶模式(AD)。当下列任一条件满足时,ATO应请求ATP进入AD模式。
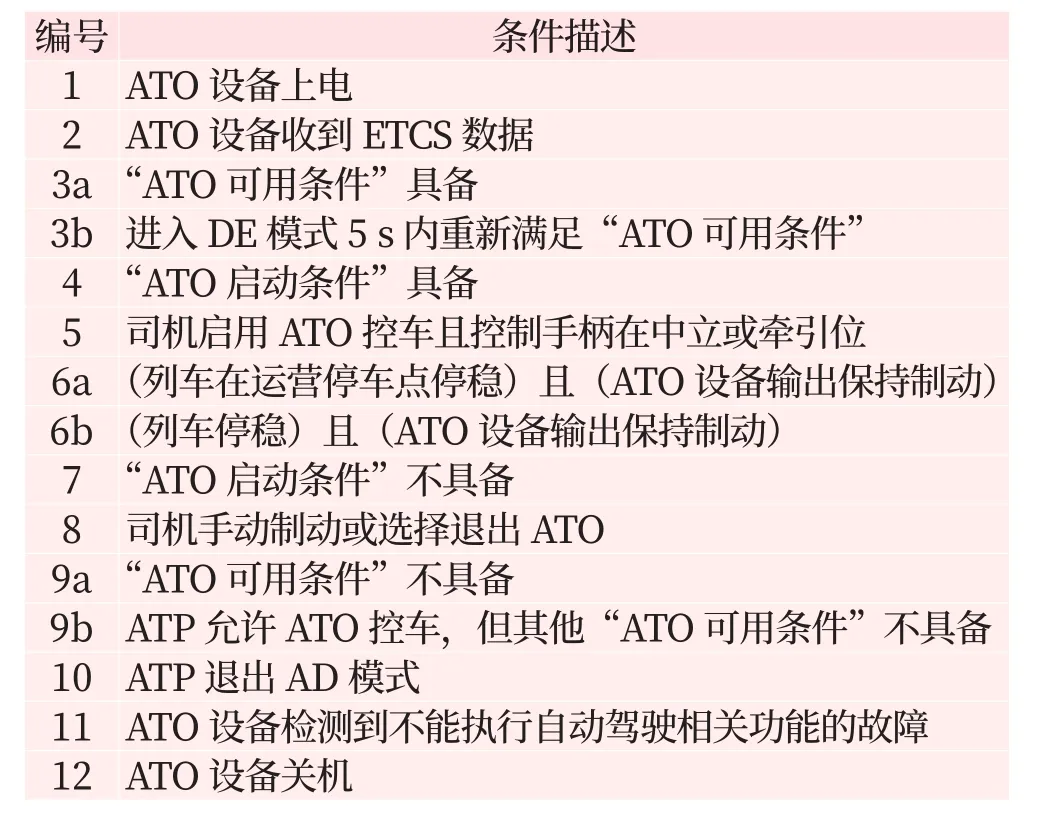
表1 模式转换条件表Tab.1 Mode transition conditions table
1)ATO设备处于RE模式,列车在运动,且控制手柄在中立或牵引位。
2)ATO设备处于RE模式,列车停稳,且控制手柄在中立位。
3)ATO设备处于EG或DE模式。
4)ATO设备处于AV模式,ATP处于AD模式,且控制手柄在中立位。
当ATP允许ATO控车且收到AD模式请求时,ATP进入AD模式。若ATO设备停止发送AD模式请求或ATP设备本身不再允许ATO控车,则ATP退出AD模式,并根据既有转换条件进入相应的工作模式。
4 运营场景举例
4.1 正常运营场景
ATO正常运营场景如图4所示。
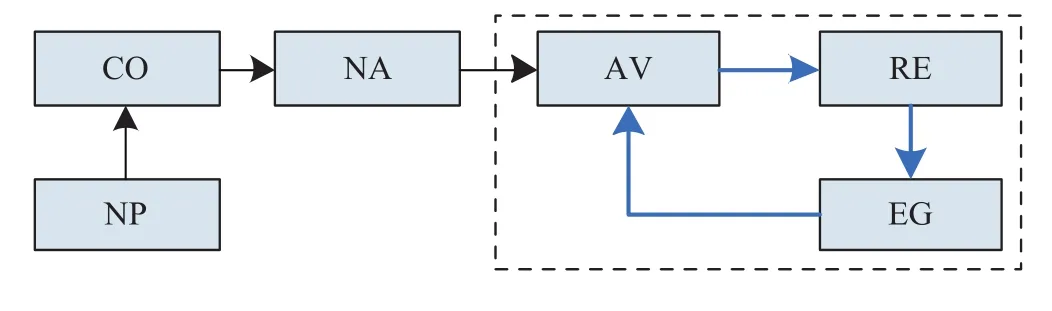
图4 正常运营场景Fig.4 Normal operational scenario
上电后,ATO设备由NP进入CO模式,向ETCS发送数据请求。当收到ETCS数据后,ATO设备进入NA模式。当“ATO可用条件”具备后,ATO设备进入AV模式。当“ATO启动条件”具备后,ATO设备进入RE模式,并提示司机启用ATO。司机启用后,ATO设备进入EG模式,ATP进入AD模式。在EG模式下,ATO设备控制列车运行,当根据运行计划在车站停车后,ATO设备输出保持制动,退回AV模式。当发车倒机时结束等“ATO启动条件”满足后,ATO设备再次提示司机启用ATO。司机启用后,ATO设备重新进入EG模式,控制列车运行。这样,ATO设备在AV、RE、EG模式之间切换,ATP则保持AD模式。
4.2 列车驶离ATO区域
列车驶离ATO区域的运营场景如图5所示。经过正常流程,ATO进入EG模式,控制列车运行。当离开ATO区域后,“ATO可用条件”不再满足,ATO进入DE模式,提示司机退出ATO。同时,系统将进行如下处理。
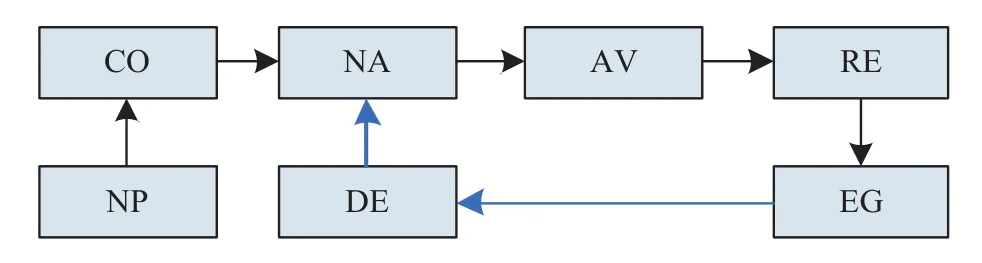
图5 列车驶离ATO区域的运营场景Fig.5 Operational scenario of train leaving ATO area
1)在进入DE模式的前5 s时间内,ATO设备仍按照之前的运行曲线控车,但不再输出牵引。
2)如果司机在5 s时间内进行退出ATO操作(手柄制动或选择退出ATO),ATO设备进入NA模式,ETCS退出AD模式。
3)如果司机未采取退出ATO操作,5 s后ATO设备将输出最大常用制动停车。在停车过程中,如果司机操作退出ATO,ATO设备将缓解制动并进入NA模式,ETCS退出AD模式;如果司机仍未进行操作,ATO设备在列车停车后自动进入NA模式,ETCS退出AD模式。
5 总结
ETCS系统通过定义各种模式,以区分不同运营场景的人机职责。基于ETCS的ATO系统沿用这个原则,同时系统需求规范通过定义各种模式下的控制功能和数据处理原则,尽量避免各信号厂商在具体实现时的歧义性,为实现不同型号ATP和ATO设备的互联互通提供了基础。
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
农机质量与监督(2021年5期)2021-07-02
铁道通信信号(2020年1期)2020-09-21
小学生学习指导(低年级)(2019年6期)2019-07-22
电子制作(2018年11期)2018-08-04
新民周刊(2016年20期)2016-05-25
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
中国火炬(2014年11期)2014-07-25