
电动智能叉车结构设计
2019-12-05 02:56赵浩甲宋文学
制造业自动化 2019年11期
赵浩甲,宋文学,李 莎
(1.西安工业大学 机电工程学院,西安 710021;2.西安航空学院 机械工程学院,西安 710077)
0 引言
近年来,随着我国市场经济的飞速发展,货物流通的加快,叉车取代人工搬运,在物流中扮演者重要的角色[1]。在工厂中,为提高空间的利用率,人们需要把库房的修建成高低位置不同的网格结构,方便存放货物,这样就使得较低位置容易取放,较高不容易取放,尤其对一些体积大,重量大,位置较高的货物,工人搬运的难度更大。遥控叉车除了具备传统叉车的各项基本功能外,减少了人力资源的使用,提高搬运效率的同时,在危险现场抢救物资等方面,降低人员伤亡也起到一定的作用[2~5]。
袁培江,宋博,马福存等[6]在一种轻负载智能叉车一文中提出的叉车由升降装置、驱动系统和定位系统以及设置在车架上方的车载电脑。驱动系统包括驱动电机、电机减速器、编码器、电机座、轴承座、驱动轮、联轴器、驱动轮轴;定位系统包括车架前方的激光测距仪、智能相机以及安装在货叉架上的定位传感器;升降装置包括电机、丝杠机构和货叉架,电机安装在丝杠机构下方,丝杠机构与货叉架通过丝杠螺母转换座连接。叶嘉文[7]发明的智能叉车包括:叉车本体,置于叉车本体上的叉板,置于叉板上的标签识别器,接收标签识别器的控制器,连接于控制器的警告器。张宁[8]发明的一种电动智能叉车包括叉车本体,设置于叉车本体用于控制叉车动作的控制端以及与控制端无线通信的远程移动端;所述控制端包括一个以上均匀布设于叉车本体周侧的摄像头、方向传感器、显示屏、第一无线收发模块以及一控制单元,所述摄像头、方向传感器、显示屏和第一无线收发模块与所述控制单元电连。
本装置设计出了通过双遥控系统、图传系统、超声波避障系统和太阳能供电系统可以实现对货物进行存放和搬运等功能的电动智能叉车。
1 电动智能叉车工作原理
本叉车在在实际工作中,分为工作和待工作状态。其工作原理流程图如图1所示。
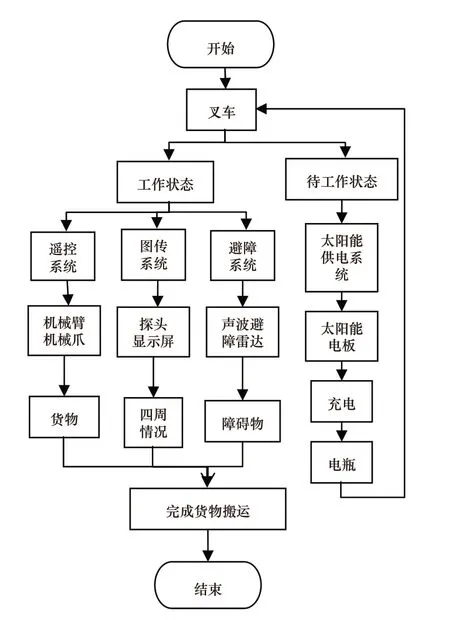
图1 电动智能叉车工作原理流程图
叉车在工作时,门架和车身上的机械臂相互协作,对车身前后左右的物体进行搬运和存放。门架上的红外探头通过图传系统对叉车前方的路况进行监测,车身四周的超声波避障系统在避障范围2cm~5m内会产生蜂鸣声。在待工作时在叉车的左右顶部和尾部的太阳能电板在四杆机构的作用下进行展开,保证采光面积最大的情况下进行充电。
2 叉车总体结构设计
本设计的总体结构通过UG8.5进行三维建模,其叉车包括前置机械爪、滑块、滑轨支架、前置红外探头、机械臂、太阳能板、避障雷达、车身等组成。太阳能板固定在叉车的尾部并可绕固定端旋转一定角度;机械臂固定在旋转云盘上可进行多方位抓取;前置机械爪固定在滑块上,滑块固定在滑轨支架内,滑块可带动机械爪上下运动并在舵机作用下实现叉取或多方位夹取;红外探头固定在滑轨支架顶部中间部分;避障雷达固定在车身两侧。叉车的结构示意图如图2所示。
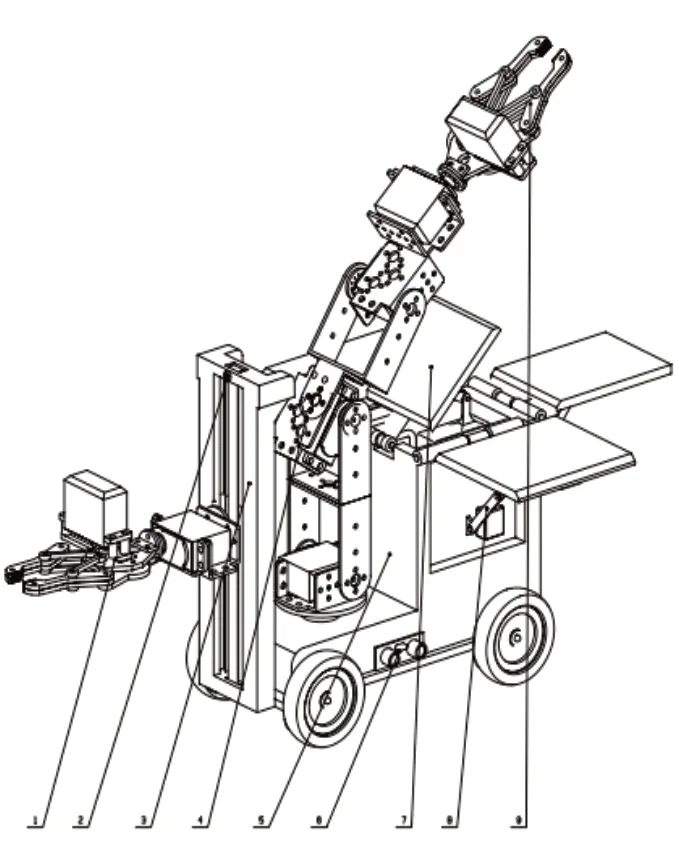
图2 电动智能叉车结构示意图
3 主要系统装置结构
3.1 叉车图传系统
红外探头安装在门架上,便于叉车前方的图像的采集。显示器内嵌于远程控制系统中,可以一边观察一边控制叉车。其图传效果如图3所示。
3.2 超声波避障系统

图3 叉车图传系统
叉车车身四周安装了超声波避障系统,其超声波避障雷达在避障范围2cm~5m内会产生蜂鸣声。其原理样机实物图如图4所示。

图4 超声波避障系统
3.3 机械臂装置
叉车门架上的机械臂安装在滑块上,滑块提供纵向移动。舵机Ⅰ是360°舵机可以实现多方位抓取,舵机Ⅱ是实现机械爪开合的90°舵机。其结构示意图如图5所示。
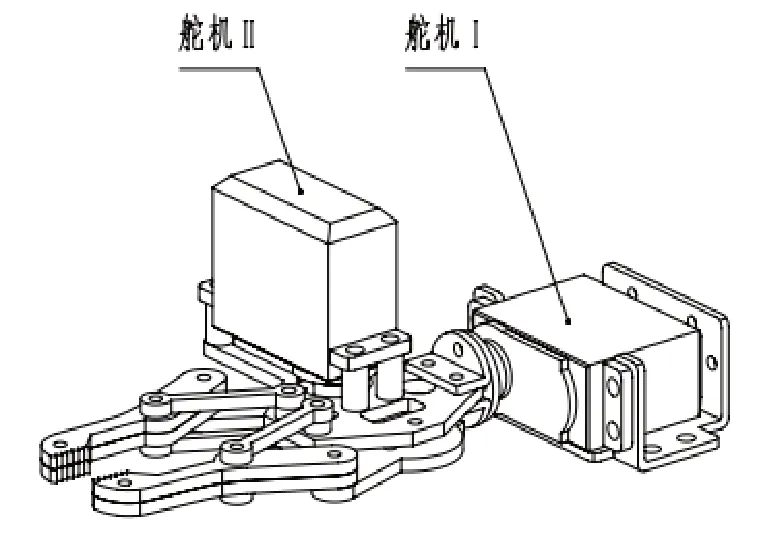
图5 叉车门架机械臂装置
叉车车身万向转台上的机械臂中,舵机Ⅲ、舵机Ⅳ和舵机Ⅴ是实现对四周货物抓取的180°舵机,舵机Ⅵ是实现多方位抓取360°舵机,舵机Ⅶ是实现机械爪开合的90°舵机。其结构示意图如图6所示。
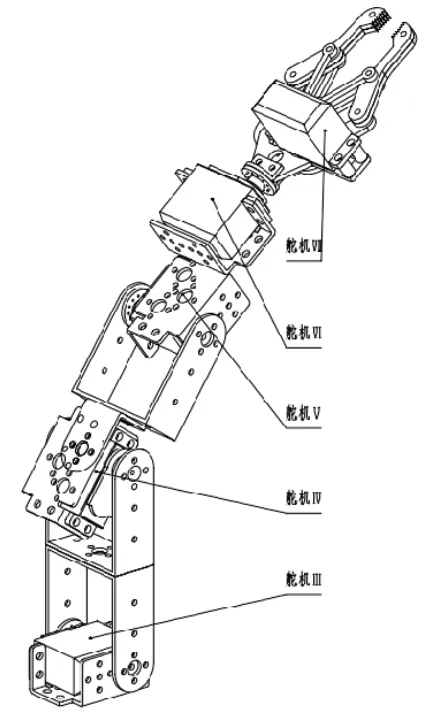
图6 叉车车身机械臂装置
3.4 太阳能电板翻转装置
叉车保证采光面积最大的情况下进行充电。其左右两侧和尾部的太阳能电池板在四杆机构和D处舵机的作用下进行展开,此时杆BC和杆CD共线机构的传动角=0°,对充电状态进行定位,其机构简图如图7所示。
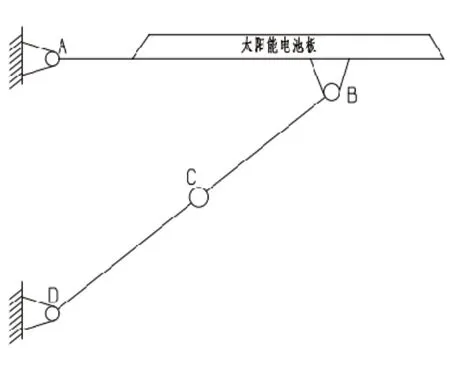
图7 叉车左右、尾部的太阳能电池板四杆机构简图
叉车顶部为了保证采光面积最大的情况下进行充电,太阳能电池板在四杆机构的作用下进行展开,根据叉车充电时太阳角度的变化调节液压缸推杆,来改变太阳能电池板的倾角进行充电。其机构简图如图8所示。
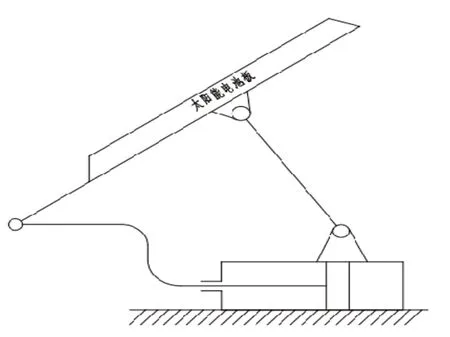
图8 叉车顶部的太阳能电池板四杆机构简图
4 电动智能叉车原理样机
根据UG8.5制作该智能叉车的原理样机运行进行验证,通过该智能叉车工作可以实现对货物的抓取和搬运、红外探头实现图传、避障系统实现避障报警、太阳能电板给叉车供给电能等功能。电动智能叉车原理样机如图9所示。

图9 电动智能叉车原理样机
5 结语
本设计设计了一种电动智能叉车。本装置通过双遥控系统、图传系统、超声波避障系统和太阳能供电系统可以实现对货物进行存放和搬运、红外探头实现图传、避障雷达实现避障报警、太阳能电板给叉车供给电能等功能。
本设计电动智能叉车,结构紧凑,可方便应用于对高低位置不同的货物的搬运。对某些有危险的区域进行作业时,工人可以远程操作,利用安装在叉车上的红外探头传回的实时画面,工人只需在安全区域通过遥控远程操作就可以了,降低了工人在工作时的危险系数。另外,对于一些较高处或难以到达的地方的货物搬运具有很强的实用性,可大大提高搬运效率。
猜你喜欢
中国储运(2022年11期)2022-11-30
中国储运(2022年11期)2022-11-30
中国储运(2022年6期)2022-06-18
中国储运(2022年2期)2022-02-23
电子制作(2018年1期)2018-04-04
求学·理科版(2017年10期)2017-12-19
婚姻与家庭·性情读本(2017年1期)2017-02-16
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
舰船科学技术(2015年8期)2015-02-27
