
新型无避让液压立体停车装置
2019-11-18 06:18:24
液压与气动 2019年11期
(1.成都理工大学 工程技术学院, 四川 乐山 614000; 2.太原理工大学 机械工程学院, 山西 太原 030024;3.南充职业技术学院 机电工程系, 四川 南充 637131)
引言
随着城市汽车数量日益增多,而停车设施严重不足,停车位存在着极大缺口,中心商业区、学校、医院、酒店及旅游景点等公共区域,停车难的现象尤为突出,已成为制约当地经济发展和城市建设的重要因素之一[1]。设计研制一种高效安全的立体停车装置可有效缓解停车难的问题[2]。基于目前悬臂单立柱无避让立体停车装置由于单边受力而存在倾斜、晃动、稳定性差、部件易于受损等安全隐患,本着“简单、安全、实用、低成本”的原则设计了一种新型无避让液压立体停车装置,该装置可实现车辆安全可靠、快速、方便的存取。
1 新型无避让立体停车装置工作原理
新型无避让立体停车装置设计方案如图1所示,主要由液压驱动系统、移动导轨、框架支撑主体、液压伸缩拉杆、回转升降立柱、载车板及PLC控制系统等组成。
新型无避让立体停车装置工作原理: 按下操作面板上存车按钮后, PLC控制行走液压马达驱动行走轮沿着地面导轨滚动,带动立柱、载车板沿地面导轨向车位外端移动,同时液压拉杆沿着上层框架轨道槽向外滑动,当行走轮碰到地面导轨上外端限位开关后,行走液压马达停止运行, 立柱、载车板停止移动;PLC发信号控制双向摆线液压马达运行,通过蜗轮蜗杆驱动立柱、载车板实现回转,同时液压拉杆沿着上层框架的半圆弧轨道一起滑动,当载车板转过90°后,液压拉杆碰到上支撑框架上外转限位开关,双向摆线液压马达停止运行,立柱、载车板停止转动;PLC发信号控制升降多级液压缸与液压伸缩拉杆驱动载车板下降至地面,将汽车停到(或者开离)载车板,PLC接收到汽车定位开关信号后控制系统按照与以上相反的动作,使载车板回到原位,停放在中间支撑框架上,且液压伸缩拉杆与多级液压缸同时承受载荷,实现载车板的可靠停放,完成一次车辆的存取。
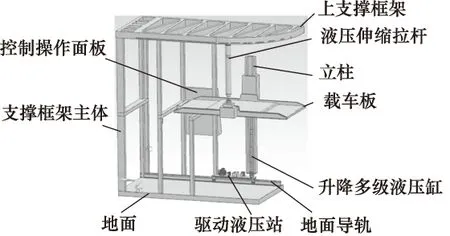
图1 新型无避让液压立体停车装置模型
2 新型无避让立体停车装置主要机械结构
新型无避让立体停车装置的主体结构采用框架支撑结构,与地面多点固结,机构受力状态好,保证了上层车位停车安全、稳定可靠。上层框架结构上加装篷布,可防雨、防尘、防晒,避免汽车直接暴晒与太阳,有效控制在炎热天气下,车厢内的温度持续上升,同时有效避免了高处跌落物对汽车的损伤。存取车过程的实现通过PLC控制液压系统驱动移动机构、旋转机构、升降机构按照既定的顺序动作来完成。
2.1 移动机构
新型无避让立体停车装置的移动机构包含地面导轨、行走液压马达、立柱、同步带传动机构、导轨行走轮、上层框架导轨槽、液压拉杆及限位开关等,行走液压马达在PLC控制下运行,通过同步带传动机构驱使行走轮沿着地面导轨滚动,移动基座带动立柱沿着地面导轨移动,同时液压拉杆沿着上层框架的导轨槽滑动,进而实现载车板的横移,移动过程中,液压拉杆、升降多级液压缸及中间支撑框架同时支撑载车板,受力均衡,保证了载车板平稳移动。水平移动有效行程为3.4 m,移动驱动机构如图2所示。
2.2 回转结构
新型无避让停车装置的转动由回转机构驱动完成,回转过程中要克服负载产生的惯性力矩、摩擦力矩及风的阻力及其他阻力,且回转机构需要频繁启动、制动,突然启动或制动过程中会产生很大冲击,从而造成装备整体不稳定[3]。为解决回转过程中产生的冲击特性,保证装备稳定、可靠运行,新型无避让立体装置采用双向摆线式液压马达通过蜗轮蜗杆驱动立柱带动载车板实现回转。
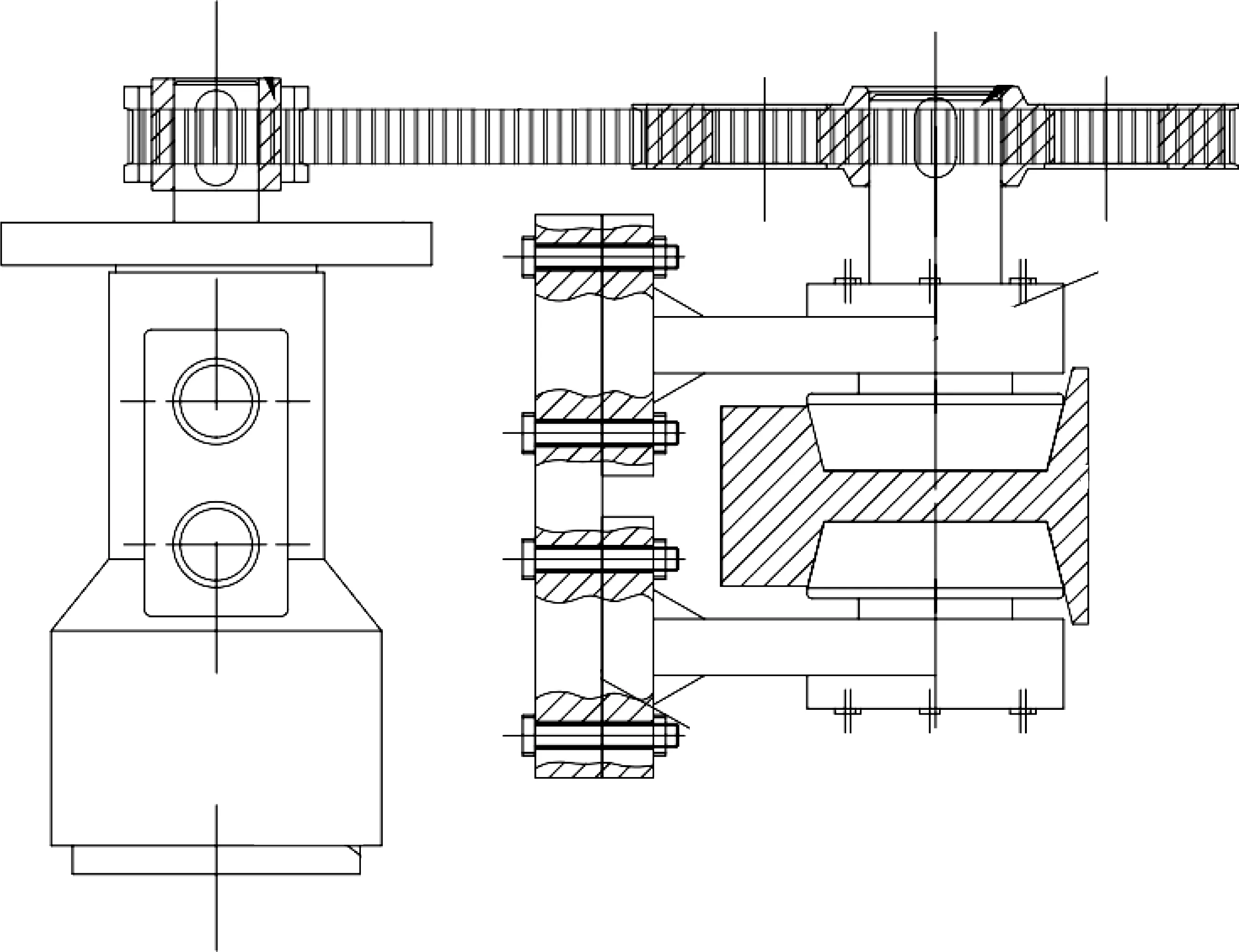
图2 移动驱动机构
新型无避让立体停车装置的回转结构由双向摆线液压马达、蜗轮蜗杆、回转支撑盘、立柱、液压拉杆、上层框架、限位开关等组成,其回转驱动机构如图3所示。回转机构通过PLC控制双向摆线液压马达回转,经蜗轮蜗杆传动机构驱动回转支撑盘转动,回转支撑盘带动立柱回转,进而驱使载车板实现转动,回转过程中液压拉杆沿着上层框架的圆弧轨道滑动,保证了回转过程中载车板两边同时受力,避免了目前单立柱无避让停车装置在回转过程中单边受力承载存在的倾斜、晃动等安全隐患。且通过支撑框架上设置限位开关实现了载车板90°正反向的精确回转。
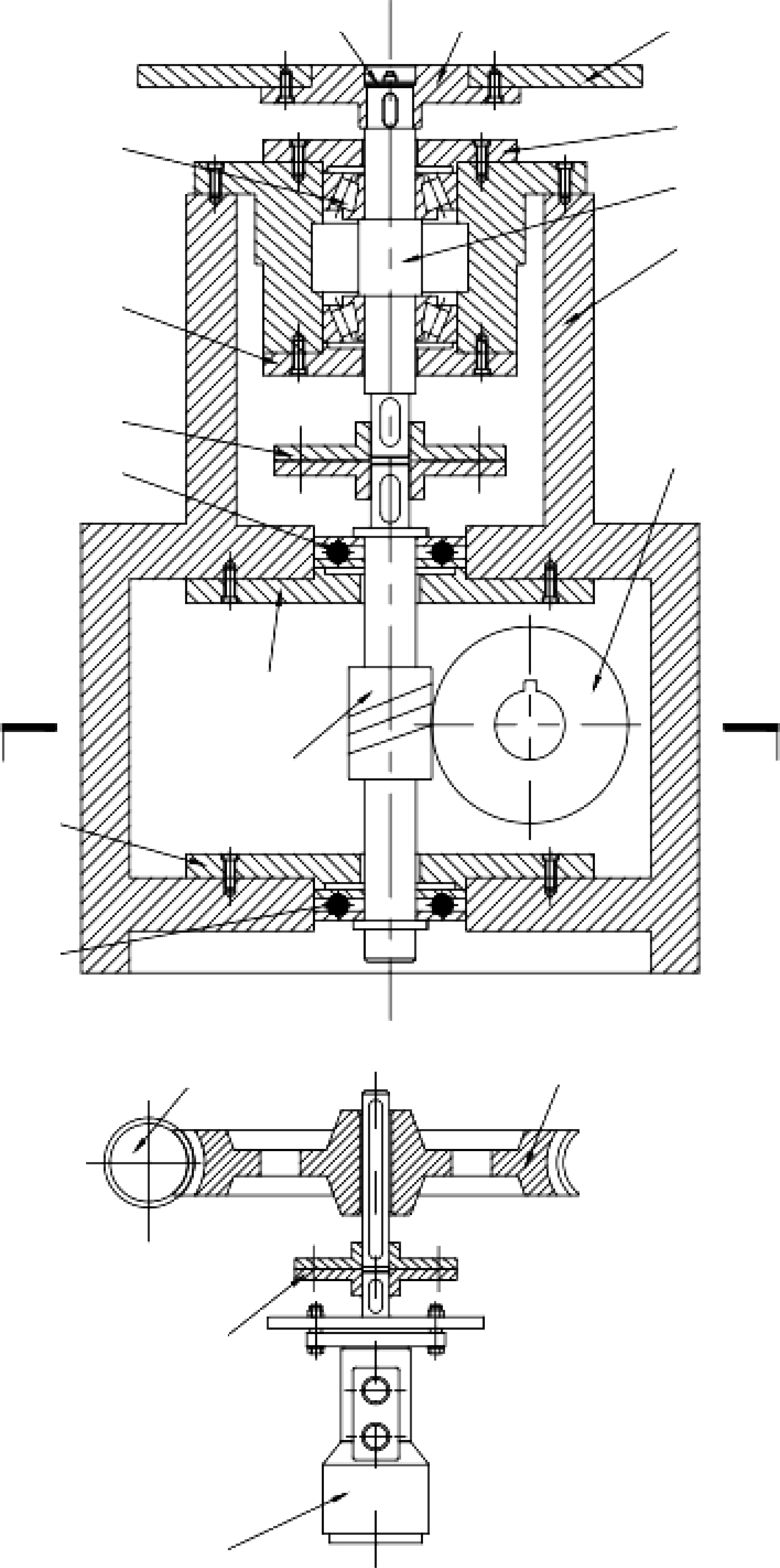
图3 回转驱动机构
2.3 升降机构
立体停车装备中,升降机构直接影响装备的可靠性、运行稳定性及整体结构受力情况,对其安全性要求最高[3]。
新型无避让立体停车装置采用液压拉杆与升降多级液压缸共同驱动载车板实现升降,有效地避免了目前悬臂单立柱无避让停车装置升降过程中,抗弯抗挠部件为活动部件,且单边受力承载而引起的倾斜、晃动、稳定性差等安全隐患, 停取车过程更加平稳、安全可靠。新型无避让立体停车装置的升降机构主要包含液压拉杆、上层框架、升降驱动液压缸、立柱等,通过PLC控制液压拉杆与升降多级液压缸按照预定的速度同时实现伸缩运动,驱动载车板实现平稳升降,升降的有效行程为2.1 m。
3 液压驱动系统设计
停车装备在载车运行过程中,负载惯性大,启停及换向过程中,速度、加速度会急剧变化,负载力对设备整体和传动控制系统将产生巨大冲击,系统故障率提高[3-4]。液压传动与传统立体停车设备采用的电机链条拖拽传动机构相比,具有传动平稳、冲击振动较小、驱动功率大、易于实现直线及回转运动、易于实现自动控制[5],故该新型无避让停车装置采用液压系统作为动力源,且通过PLC控制电液比例换向阀实现动作切换,降低切换速度,有效减小设备运行过程中产生的冲击振动,提高了设备的工作稳定性与可靠性。采用电液比例换向阀抗污染能力强,大大减小了污染造成的工作故障,提高了系统工作稳定性与可靠性[5]。
该停车装置的液压驱动系统主要包含行走驱动系统、回转驱动系统、升降系统3部分[6-7],可实现载车板横移、回转、升降、可靠定位、调速及制动等功能。设备在运行过程中,整机运动要求平稳,不能产生较大摇晃、振动,以防出现较大液压冲击;换向过程要平稳,不能产生较大的振动、噪声;启动、制动过程中冲击要小[7];停取车时间短,效率高。
依据设备运行的上述要求,新型无避让停车装置液压系统的主要技术参数如表1,存车或取车一次的时间不超过1.5 min。
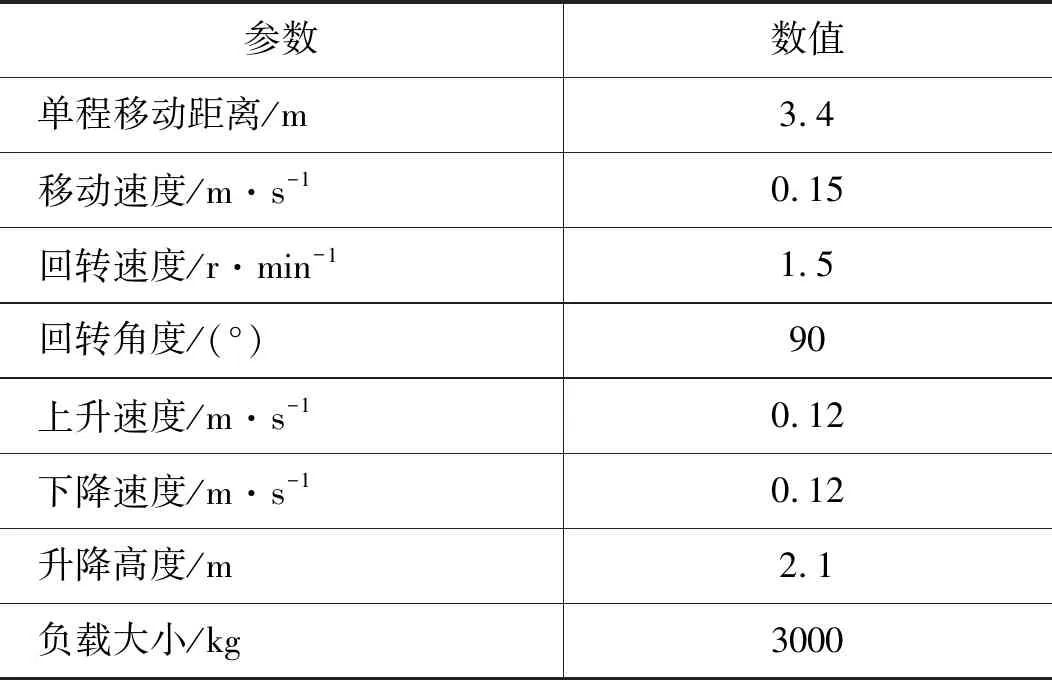
表1 停车装置液压系统技术参数
3.1 行走系统
为保证载车板移动过程中平稳运行,且减小速度受负载变化而产生的波动,采用液压马达与同步带传动驱动载车板移动,且采用蓄能器、溢流阀与单向阀设计方案,减小启停冲击[8],同时通过PLC控制电液比例换向阀实现动作的切换,减小切换速度,有效改善装置在开始移动与停止移动时产生的惯性冲击振动。行走系统液压原理图如图4所示。
1.压力源 2.调速阀 3.电液比例换向阀 4~7.单向阀 8、9.溢流阀 10.双向液压马达 11、12.蓄能器 13.同步带传动
3.2 回转系统
为保证停车装置在启动回转与制动过程中稳定、可靠运行,减小在回转过程中产生的冲击振动,采用双向摆线式液压马达驱动停车装备实现回转,且采用PLC控制电液比例换向阀,降低切换速度,减小冲击,同时采用双向液压锁,实现可靠定位、制动,防止存取车过程中发生回摆引发安全事故[7-8],回转系统液压原理图如图5所示。
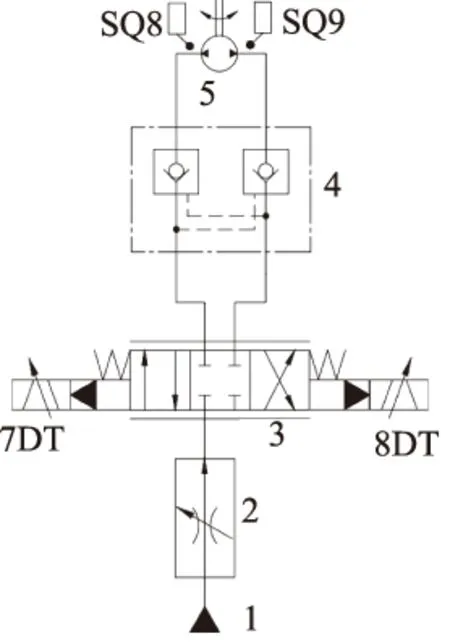
1.压力源 2.调速阀 3.电液比例换向阀 4.双向液压锁 5.双向摆线马达
3.3 升降系统
载车板的升降通过液压拉杆与升降液压缸共同驱动完成,运行过程中通过PLC控制电液比例换向阀实现工况的切换,可降低切换速度,有效改善系统的冲击振动。
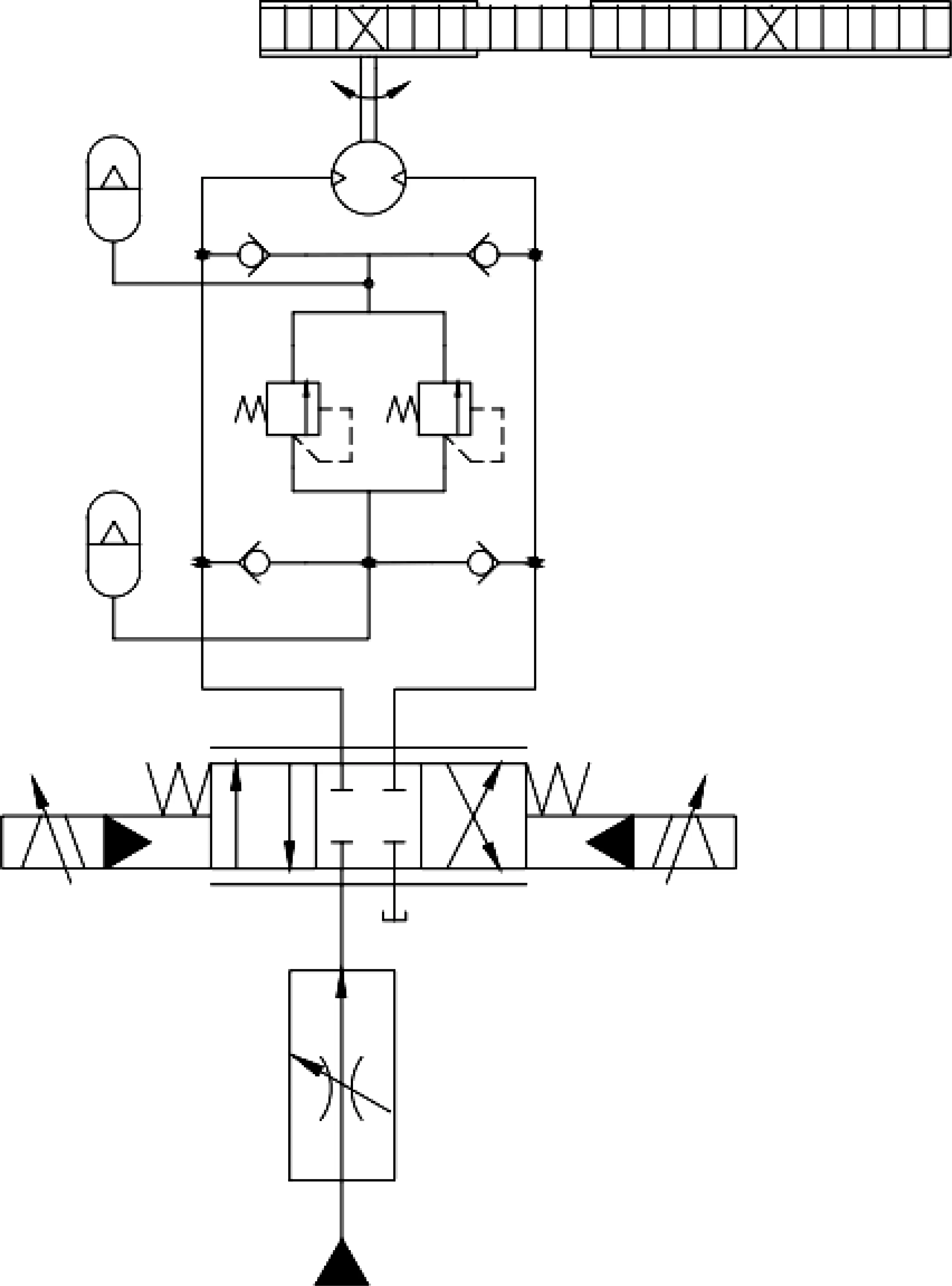
为保证载车板上升到位后,可靠地停放,且控制载车板运行速度不受负载大小与方向的影响,能够平稳运行, 本系统采用平衡阀控制载车板,且在平衡阀控制压力端口加一高频响的小蓄能器和小阻尼孔,可有效控制压力波动,减小系统的振动[9-10]。为确保载车板能够准确停止定位,系统中设计了双向液压锁,确保下层车位及人员安全。为保证载车板在升降过程中能准确的实现有效行程且不发生倾斜,系统采用相同结构的液压拉杆与升降液压缸,相同的控制油路结构及相同的液压控制元件,同时在液压拉杆与升降液压缸的极限行程端均安装有上升、下降限位开关,通过PLC接受限位开关信号控制电液比例换向阀的工作位置及开口度保证液压拉杆与升降液压缸实现位移同步,升降系统液压原理图如图6所示。
4 控制方案设计
根据无避让立体车库运行的原理,存取车过程中3个执行元件的各动作属于典型的顺序控制问题,为确保存取车各动作准确、安全可靠、自动运行,本研究采用S7-200型PLC构成运动控制系统,其硬件接线图如图7所示。
为方便操作,在设备右侧设计安装了操作控制箱,用户按下存车或取车按钮,PLC按照既定的动作顺序控制执行元件动作,自动完成车库移动、回转及升降,实现存取车[11-12],其控制功能流程如图8所示。当运行过程中出现故障或误操作时,装置会发出声光报警,提示用户按下急停按钮,提高了装置运行的安全性。

1.液压泵 2.先导式溢流阀 3、4.电液比例换向阀 5、11.平衡阀 6、12.蓄能器 7、13.小阻尼孔 8、14.双向液压锁 9.多级驱动液压缸 10.二位二通电磁换向阀 15.多级液压拉杆
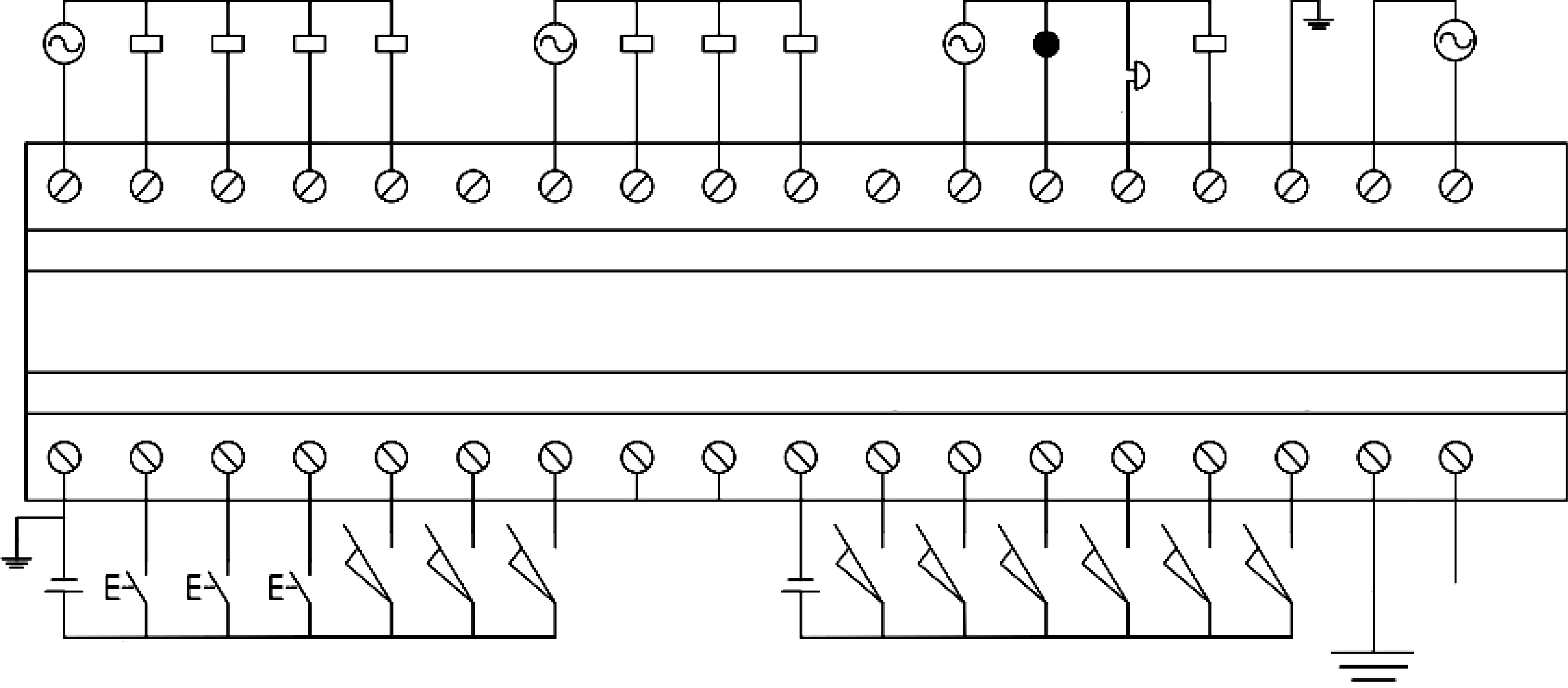
图7 PLC的I/O地址分配及外部接线图
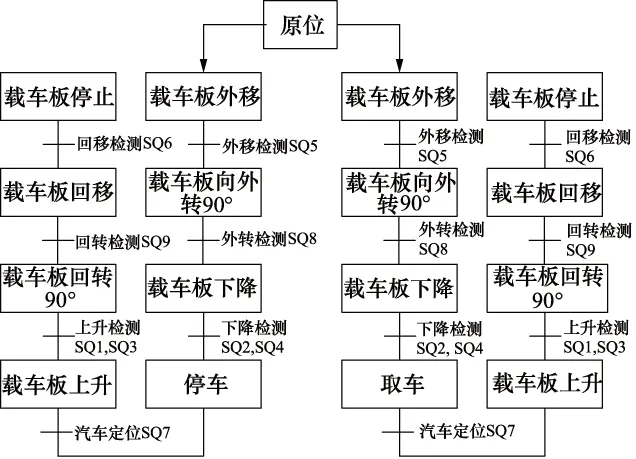
图8 控制功能流程图
5 结论
为解决目前悬臂单立柱无避让立体停车装置存在的安全隐患,设计了一种新型液压无避让立体停车装备,该装备在设计上采取了以下措施,通过机、电、液联合工作实现无避让存取车,有效提高了系统运行的安全可靠性与自动化程度。
(1) 该装置采用液压拉杆与框架支撑无避让结构,受力均衡,运行稳定可靠,有效解决了目前单立柱无避让结构存在的受力不均,易产生倾斜、摇晃及配件损坏等安全隐患,大大降低了系统故障率与维修率;
(2) 该装置采用液压驱动,安全性、可靠性、运行平稳性更高,有效避免了目前立体停车库采用电机链条驱动机构存在链条断裂及运行稳定性差等安全隐患;
(3) 升降液压系统回路中,采用平衡阀与双向液压锁,保证载车板可靠停留定位,且在平衡阀控制压力端口加一高频响的小蓄能器和小阻尼孔,可有效抑制压力波动,减小系统的振动,保证载车板升降过程中平稳运行;
(4) 采用PLC控制电液比例换向阀实现工况的切换,可减小切换速度,有效改善系统的冲击振动,保证停取车过程准确可靠平稳的自动运行。
猜你喜欢
水电站机电技术(2024年2期)2024-02-28 06:55:08
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:38
汽车实用技术(2022年6期)2022-04-02 06:25:48
今日自动化(2021年6期)2021-09-03 18:27:17
锻压装备与制造技术(2021年3期)2021-08-13 08:39:54
装备制造技术(2018年6期)2018-08-04 07:19:34
铁道机车车辆(2016年3期)2016-10-25 09:02:43
电子机械工程(2016年3期)2016-09-07 09:24:54
电子制作(2016年19期)2016-08-24 07:49:48
筑路机械与施工机械化(2014年2期)2014-03-01 02:57:59
