纯电动车复合电源功率逻辑门限控制策略研究
2019-11-14 04:50陈庆樟王正义
重庆交通大学学报(自然科学版) 2019年11期
陈庆樟,王正义,2,王 康,王 尚
(1. 常熟理工学院 汽车工程学院,江苏 常熟 215500; 2. 苏州大学 机电工程学院,江苏 苏州 215000)
0 引 言
纯电动车复合电源中超级电容组具有充放电速度快、功率密度高等优点[1-2],较好地满足了辅助电源的要求。超级电容组向驱动电机提供辅助电流,蓄电池组可以避免受到大电流冲击,延长其使用寿命,但是电动车行驶在频繁启停的道路上时,超级电容组持续提供辅助电流,造成电量下降速度过快,工作电压低于正常值,出现无法提供辅助电流的问题,而且作为驱动能量主要载体的蓄电池组,应该在起步阶段提供大部分驱动能量。因此如何避免蓄电池组受到持续大电流冲击的前提下,降低超级电容组荷电状态(SOC)在起步阶段的下降速度,是解决上述问题的关键。曾梦远等[3]将蓄电池组与超级电容组直接并联,建立了复合电源模型,虽然避免了大电流对蓄电池组的冲击,但是没有提供一种功率控制策略;马超群等[4]采用双DC/DC变换器并联布局结构,将负载功率的变化速率作为判断依据,确定功率控制方法,并建立了复合电源模型,但是该功率控制方法不适合频繁启停的道路工况。
关于复合电源的设计及功率控制策略研究,主要集中在超级电容组如何提供稳定的差值电流,保证蓄电池组的输出电流维持在一个理想值附近,避免其输出电流过大,却鲜有考虑超级电容组电量消耗情况及功率控制策略是否适用于频繁启停的道路工况。
基于BUCK-BOOST型DC/DC变换器,采用典型的PID控制方法,控制蓄电池组的输出功率,提出了一种逻辑门限功率控制策略,实现蓄电池组在起步阶段提供大部分驱动能量,减少超级电容组电量消耗的目的,最后搭建了完整的复合电源仿真模型,对电动车起步阶段蓄电池组和超级电容组的输出电流及功率控制策略进行仿真验证。
1 变换器工作原理及PID闭环控制设计
1.1 BUCK-BOOST电路工作原理
复合电源中超级电容组的作用除了在起步阶段提供辅助电流外,在电动车制动过程中,超级电容组负责回收制动能量[5],所以在实际应用中通常选用BUCK-BOOST型DC/DC变换器。虽然笔者的研究重点在于复合电源功率控制策略,但是为了使分析更加贴近实际应用,将BUCK-BOOST型DC/DC变换器作为控制超级电容组输出功率的元件,并对其工作原理进行分析。
BUCK-BOOST型DC/DC变换器在纯电动车复合电源中作为一个周期性通断的程控开关,通过调整开关元件的占空比,达到控制超级电容组输出功率的目的[6]。如图1为BUCK-BOOST型DC/DC变换器简化电路图。
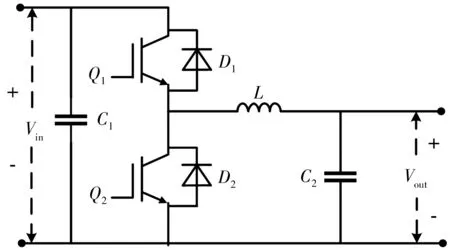
图1 BUCK-BOOST型DC/DC变换器简化电路Fig. 1 Simplified circuit diagram of BUCK-BOOST DC/DC converter
图1中:Vin为输入电压;Vout为输出电压;D1、D2为体二极管;Q1、Q2为IGBT开关;L为储能电感;C1、C2为滤波电容。
BUCK-BOOST型DC/DC变换器工作在降压阶段时,开关Q2首先处于截止状态,开关Q1在一个通断周期T内导通时长为ton,在开关Q1导通期间,超级电容的电能以磁场能的形式转移到储能电感L中,同时向输出端放电;开关Q1在一个通断周期T内截止时长为toff,在开关Q1截止期间,二极管D2导通,二极管D2、电感L、负载形成回路,由储能电感L向输出端放电。通过调整开关Q1导通时长ton和截止时长toff,改变输出功率的大小。
此时,一个通断周期T可表示为
T=ton+toff
(1)
IGBT开关的占空比D可表示为
(2)
DC/DC变换器输出电压平均值可表示为
(3)
DC/DC变换器中输出端的滤波电感可表示为
(4)
式中:f为IGBT开关的工作频率;I0为负载电流。
输出端的滤波电容为
(5)
式中:U0为纹波电压分量。
1.2 PID闭环控制设计
在电动车起步阶段,蓄电池组需要在很短的时间内输出大电流,为了避免大电流对蓄电池组的伤害,蓄电池组的理想输出功率与起步所需功率之间的差值由超级电容组提供,因此所采用的控制方法不仅需要较高的控制精度,而且需要较快的响应速度,保证超级电容组在起步阶段能够及时、准确地提供辅助功率。
PID控制方法具有快速、稳定的特点,而且在参数调节上与其他控制方法相比更加简单、成熟。如图2为基本的PID控制系统框图。
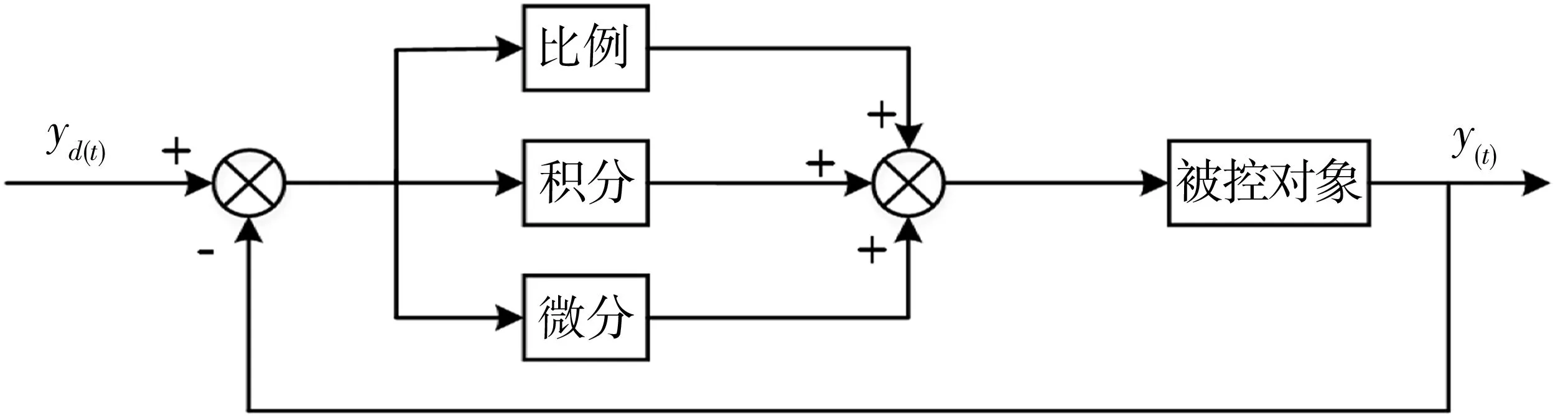
图2 PID控制系统框图Fig. 2 Block diagram of PID control system
PID控制器的输入量为控制目标值yd(t)与实际输出数值y(t)之间的差值e(t):
e(t)=yd(t)-y(t)
(6)
其控制规则为
(7)
以传递函数关系表示为
(8)
式中:kp为比例系数;TI为积分时间常数;TD为微分时间常数;U(s)、E(s)分别是控制量u(t)和偏差e(t)的拉氏变换。
PID控制器所包含的比例系数kp、积分时间常数TI和微分时间常数TD,其中比例系数kp控制系统的反应灵敏度,数值越大,反应越灵敏,但数值过大会导致振荡次数增加,调节时间过长;积分时间常数TI可以消除系统的稳态误差,提高控制精度;微分时间常数TD预测误差变化趋势,起到超前控制的效果,在误差出现之前反应消除。文中的研究对象为电源系统,加入微分控制会出现过压情况,因此微分时间常数TD设置为0,针对PI控制器中的比例系数kp、积分时间常数TI,主要是通过大量实验,根据不同参数下所获得的响应速度、稳态误差等,选取合适的参数值[7]。
将超级电容组作为控制对象,以蓄电池组的输出功率为控制目标,通过调整变换器中IGBT开关的占空比,直接控制电容组的输出电流,从而达到调整蓄电池组输出功率的目的。如图3为复合电源闭环控制系统,图中Iref为蓄电池组理想放电电流,Ic为超级电容组输出电流,Ib为蓄电池组输出电流,PI控制器根据电流偏差edc,输出占空比变化率dD,通过积分计算模块转化为占空比D,实现占空比调节。
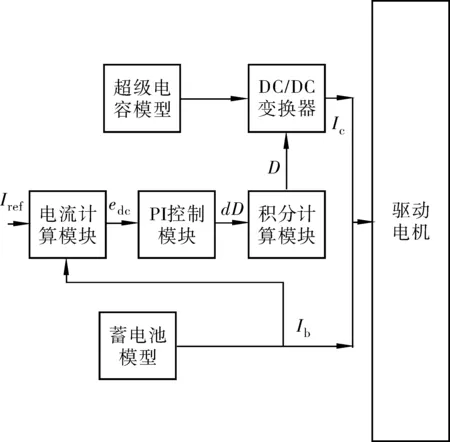
图3 复合电源闭环控制系统Fig. 3 Closed loop control system of compound power supply
蓄电池组输出电流Ib可表示为
Ib=Ibus-Ic
(9)
式中:Ibus为驱动电机所需电流;将蓄电池组理想放电电流Iref与实际输出电流Ib进行差值计算,得到两者的误差值eb(t):
eb(t)=Iref(t)-Ib(t)
(10)
PI控制器的目的是控制蓄电池组的输出电流,将蓄电池组的输出电流反馈偏差作为PI控制器的输入量,当驱动电机所需电流由蓄电池组和超级电容组共同提供时,蓄电池组输出电流反馈偏差与PI控制器输入量之间存在正负相反的关系,即:
edc(t)=-eb(t)
(11)
将式(11)带入式(7)可得PI控制器算法:

(12)
对PI控制算法结果进行积分计算,获得脉冲宽度调制信号(PWM)。
2 复合电源的逻辑门限控制策略
复合电源中常用的功率控制策略主要有逻辑门限控制、模糊控制及神经网络控制等[8],在电动车起步阶段,驱动电机所需电流一般呈直线上升趋势,不会出现随机性变电流等复杂情况,因此适合选择相对比较简单的逻辑门限控制策略[9]。
针对频繁启停的道路工况,基于逻辑门限控制方法提出了一种新的复合电源功率控制策略,如图4为逻辑门限控制策略流程图,该控制策略将蓄电池组理想输出电流Iref、驱动电机所需电流Ibus、超级电容组的持续放电时长T0和暂停放电时长T1作为判断依据,调整蓄电池组和超级电容组之间的工作模式。
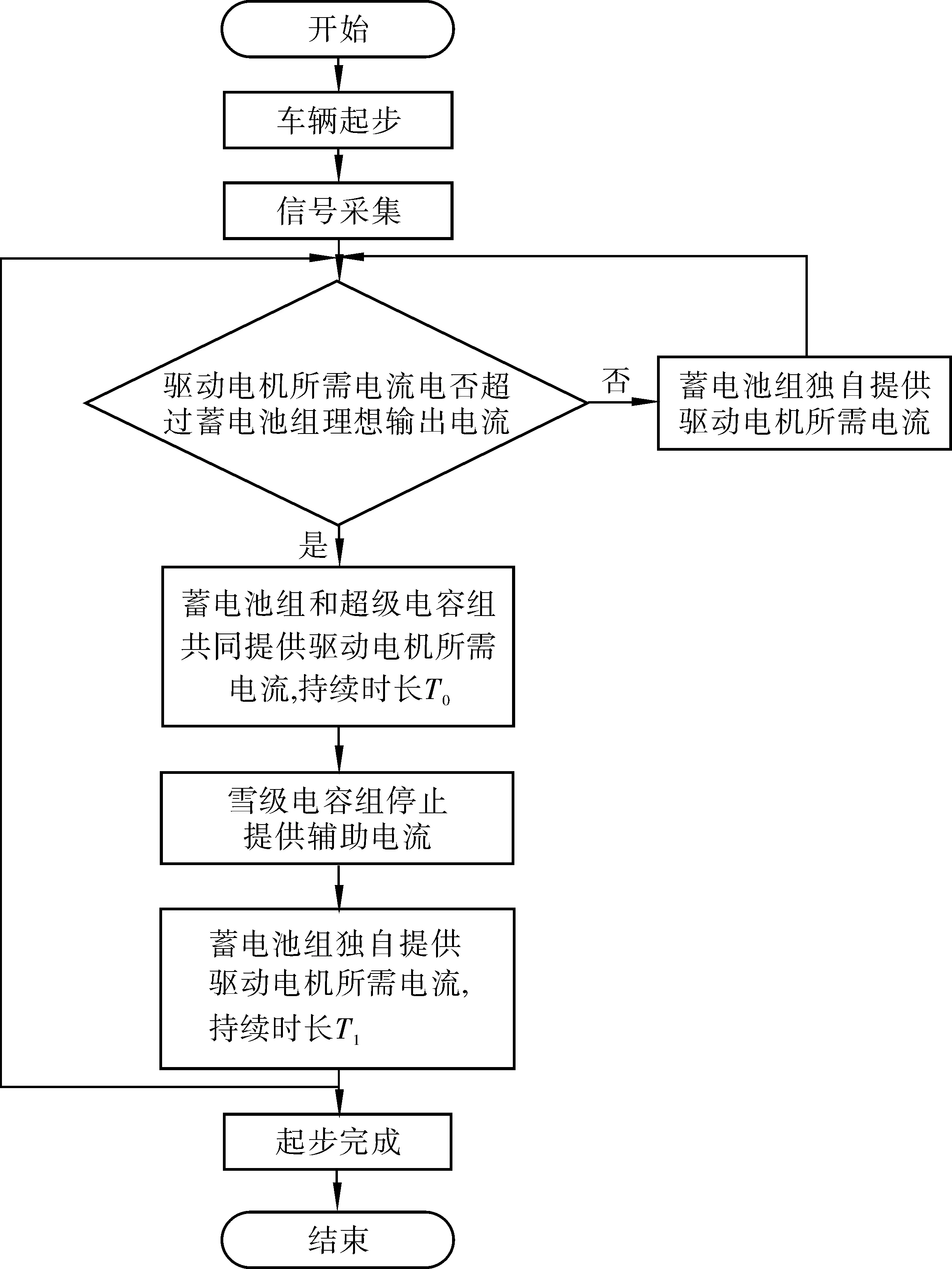
图4 逻辑门限控制策略流程Fig. 4 Flow chart of logic threshold control strategy
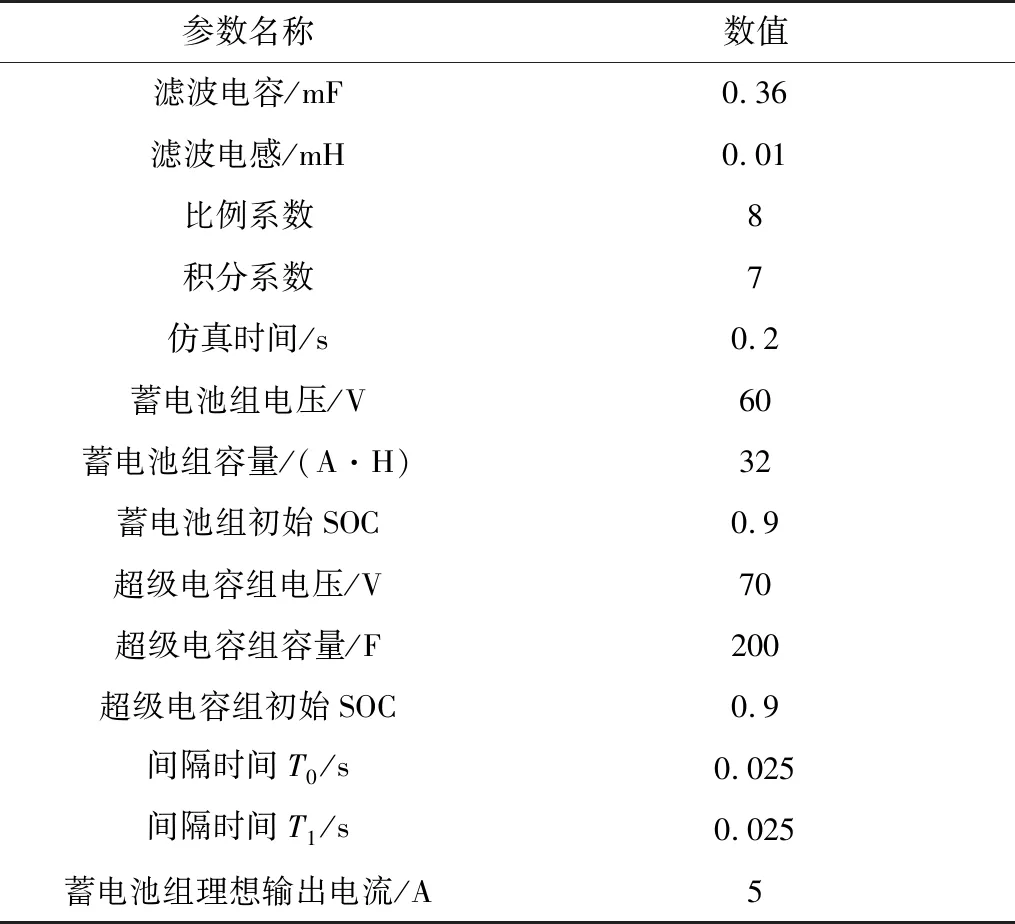
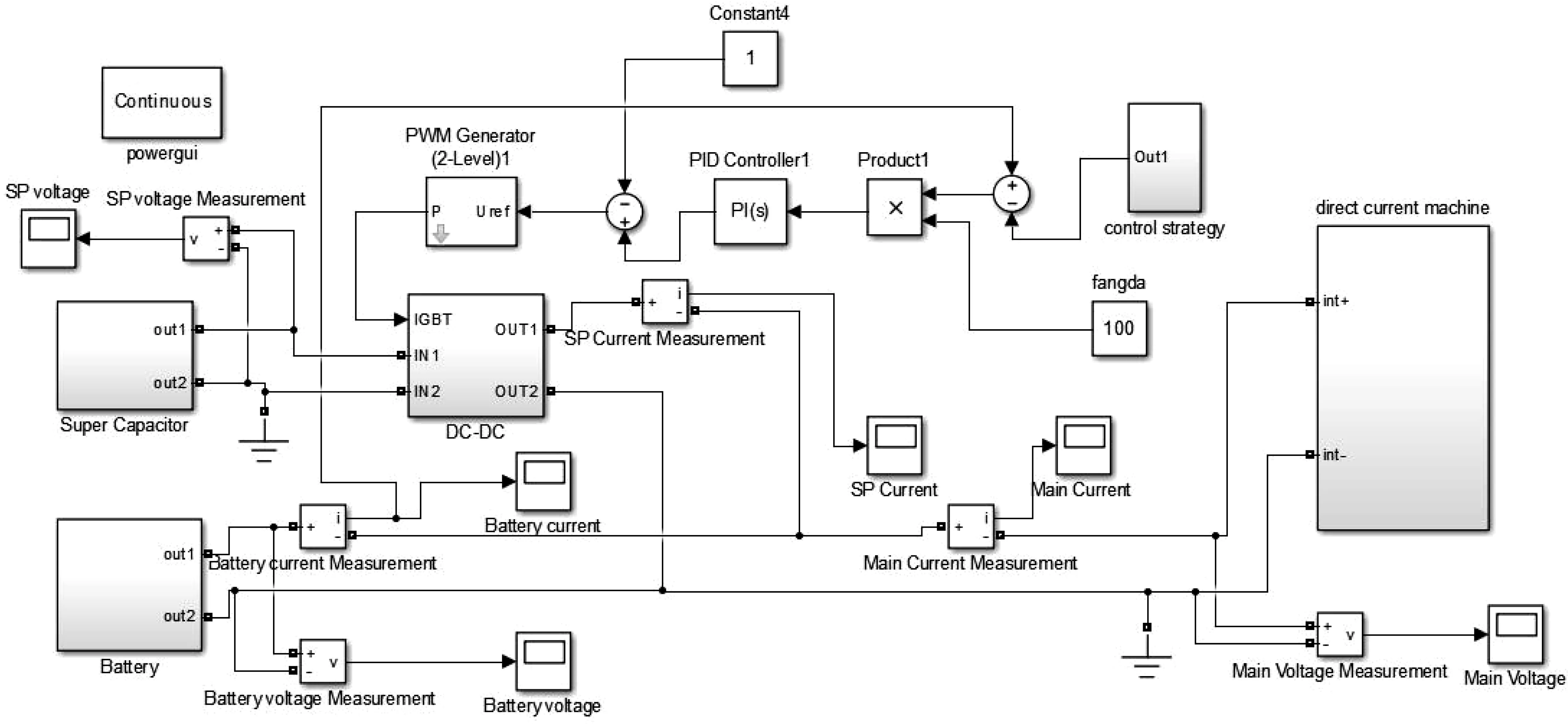
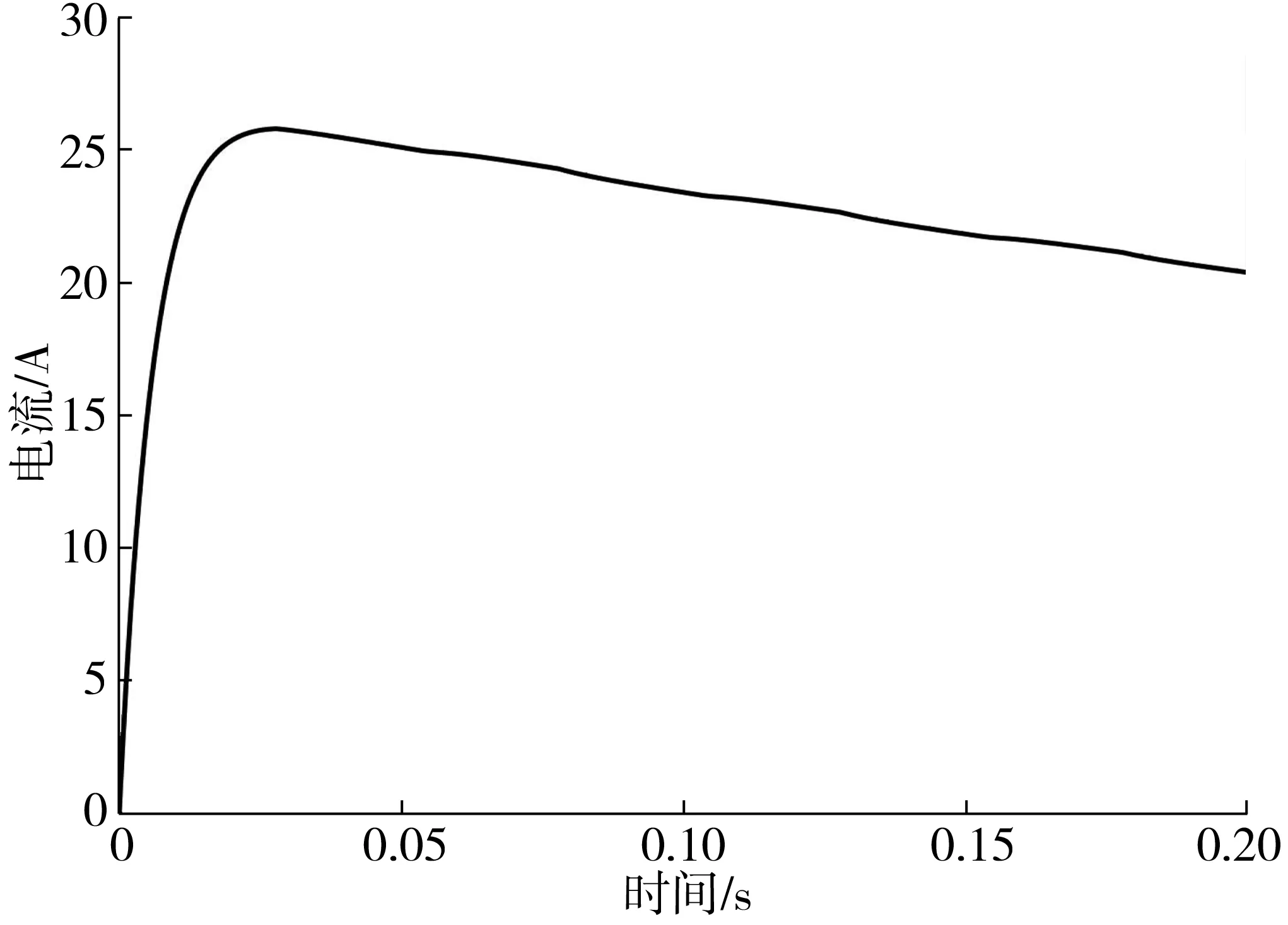
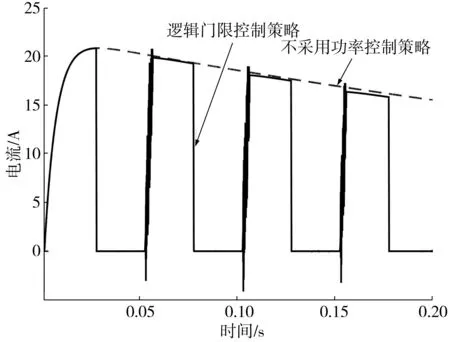
1)在电动车起步比较缓慢或者在快速起步阶段初期,驱动电机所需电流低于蓄电池组理想放电电流Ibus Ibus=Ib (13) 2)在电动车快速起步的后期,驱动电机所需电流大于蓄电池组理想放电电流Ibus>Ib,超级电容组开始提供辅助电流,此时电动车的驱动电能由蓄电池组和超级电容组共同提供,驱动电机所需电流为蓄电池组输出电流和超级电容组输出电流之和: Ib=Iref (14) Ibus=Ib+Ic (15) 超级电容组提供辅助电流的时间达到T0后,停止提供辅助电流,驱动电机所需电流重新由蓄电池组独自提供,如式(13)。蓄电池组可承受最大放电电流时间不能超过T1,避免蓄电池组受到冲击,超级电容组停止提供辅助电流时间达到T1后,重新提供辅助电流,驱动电机所需电流又由蓄电池组和超级电容组共同提供,如式(15),如此反复,直至复合电源电动车完成起步。 根据电动车行驶的不同道路工况,可针对性地调整T0和T1的大小,当电动车行驶在频繁起步的道路上时,可以适当将T0调小,将T1调大,进一步降低超级电容组SOC的下降速度;当电动车行驶在起步较少的道路上时,可以适当将T0调大,将T1调小,保护蓄电池组,增加续航里程。 根据变换器简化电路图(图1)及PI控制器原理,在MATLAB/Simulink平台上搭建闭环控制的变换器仿真模型,并将蓄电池组模块、超级电容组模块、直流电机模块及控制策略模块加入,组成一个完整的复合电源仿真模型。如图5为搭建的仿真模型。驱动电机所需电流的峰值一般出现在电动车起步阶段,为验证逻辑门限控制策略的效果,模拟电动车在短时间内起步情况下,蓄电池组和超级电容组参数变化情况,仿真参数如表1。 表1 仿真参数Table 1 Simulation parameters 图5 复合电源仿真模型Fig. 5 Compound power supply simulation model 如图6为驱动电机所需电流变化曲线,在电动车起步阶段初期,驱动电机需要大电流才能达到相应的起步转速,因此电流呈快速上升趋势,达到相应转速后,电流会呈一定下降趋势。 如图7为蓄电池组输出电流变化曲线,如图8为超级电容组输出电流变化曲线,从图中可以看出,不采用功率控制策略的蓄电池组输出电流被控制在理想值5A附近,超级电容组输出电流变化趋势与驱动电机所需电流基本一致,其负责提供驱动电机与蓄电池组之间的差值电流;逻辑门限控制策略的蓄电池组间歇性独自提供驱动电机所需电流,其电流变化曲线呈凸起的时间段内,蓄电池组输出电流等于驱动电机所需电流,超级电容组输出电流为零,在下一个时间段内,蓄电池组输出电流被控制在理想值5A附近,超级电容组提供差值电流,避免蓄电池组受到持续大电流的伤害。 图6 驱动电机所需电流Fig. 6 Current required to drive the motor 图7 蓄电池组输出电流Fig. 7 Battery output current 图8 超级电容组输出电流Fig. 8 Output current of super capacitor bank 如图9为超级电容组SOC变化曲线,从图中可以看出,在电动车起步阶段初期,采用逻辑门限控制策略和不采用功率控制策略下的超级电容组工作方式相同,因此其SOC变化趋势基本一致,在起步阶段后期,蓄电池组间歇性独自提供电流,超级电容组间歇性提供差值电流,因此其SOC曲线呈阶梯性下降趋势,下降速度较慢;不采用功率控制策略的超级电容组持续提供差值电流,其SOC曲线呈直线下降趋势,下降速度较快。 图9 超级电容组SOCFig. 9 SOC of super capacitor bank 1)对BUCK-BOOST型DC/DC变换器工作原理进行了分析,采用典型的PID闭环控制方法,通过改变IGBT开关的占空比,实现调节蓄电池组输出功率的目的,并在MATLAB/Simulink平台上搭建了模型进行仿真验证。 2)针对频繁启停的道路工况,以蓄电池组理想输出电流、驱动电机所需电流、超级电容组持续放电时间和暂停放电时间作为判断依据,提出一种逻辑门限功率控制策略,实现保护蓄电池组和节省超级电容组电量的目的。 3)在MATLAB/Simulink平台上搭建了带有逻辑门限控制策略的复合电源模型,并将仿真结果与不采用功率控制策略的仿真结果进行了对比分析,发现带有逻辑门限控制策略的复合电源中,超级电容组SOC下降速度更慢,蓄电池组没有持续大电流放电,适合应用于频繁启停的道路工况,而且整个系统工作稳定,PI闭环控制方法精度高,响应速度快。3 建模与仿真


4 结 论
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车实用技术(2022年4期)2022-03-07
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
21世纪商业评论(2020年12期)2020-01-14
火力与指挥控制(2019年4期)2019-06-14
中国公路(2017年5期)2017-06-01
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14