
机翼非水平机动攻击方式研究
2019-11-13 06:21杨振声黄勇强穆晓敬
教练机 2019年3期
杨振声,黄勇强,汪 琦,穆晓敬
(航空工业洪都,江西 南昌,330024)
0 引言
传统的水平、俯冲、拉起等轰炸方式在投弹机动中没有横侧机动,左右机翼基本水平,可以统称为机翼水平(WL,Wings Level)机动攻击方式。如果进行纵向机动的同时也进行横侧向机动,则左右机翼不水平,称为机翼非水平(NWL,Non-Wing Level)机动。相对于机翼水平机动投弹,机翼非水平机动攻击由于其横侧向机动的特性,并不要求严格的进入点和初始方向瞄准,所以可以和低空突防进入、退出及攻击前后的规避机动较好的结合,攻击更隐蔽而突然,暴露于威胁之下的时间更少,具有更大的规避机动自由度,攻击中更不易被地面防空火力击中,能够提高攻击效率,增强本机的生存性。
随着现代战机的速度、机动性能的大幅度提高和战争环境的复杂化,驾驶员在机动攻击任务中通常需耗费大部分精力在目标瞄准跟踪和飞行操纵上,使得驾驶员飞行负担过重,易产生驾驶疲劳,降低飞行效率。为减轻驾驶员在机动攻击中飞行负担,本文以飞机在低空高速转弯时机翼非水平机动攻击为例,研究一种机动攻击指引系统,实现自动瞄准,从而帮助驾驶员完成机动攻击任务。机动攻击指引系统的基本工作过程为:根据机载跟踪雷达及目标状态估计器提供的目标运动状态信息,以及飞机自身传感器提供的本机信息,经火力控制系统解算,给出瞄准偏差信息,输送给火力/飞行耦合器,由它产生控制飞行控制系统的操纵指令,通过平视显示器显示给驾驶员,由驾驶员依提示完成机动攻击。机动攻击指引系统结构框图如图1所示。
1 机翼非水平机动攻击方式
1.1 系统结构配置
图2为机动攻击指引系统工作原理图,它是由相对运动、火控解算、机动轨迹控制、火力/飞行耦合器、平显、驾驶员在环、飞行控制系统和飞机运动学等几部分组成。
为了借助数字仿真平台验证机动攻击指引系统的正确性和可行性。需将图2中的虚线框内的平显和驾驶员环节取消,由火力/飞行耦合器生成的飞行操纵指引指令直接送入飞行控制系统,构成机翼非水平自动攻击系统,如图3所示。
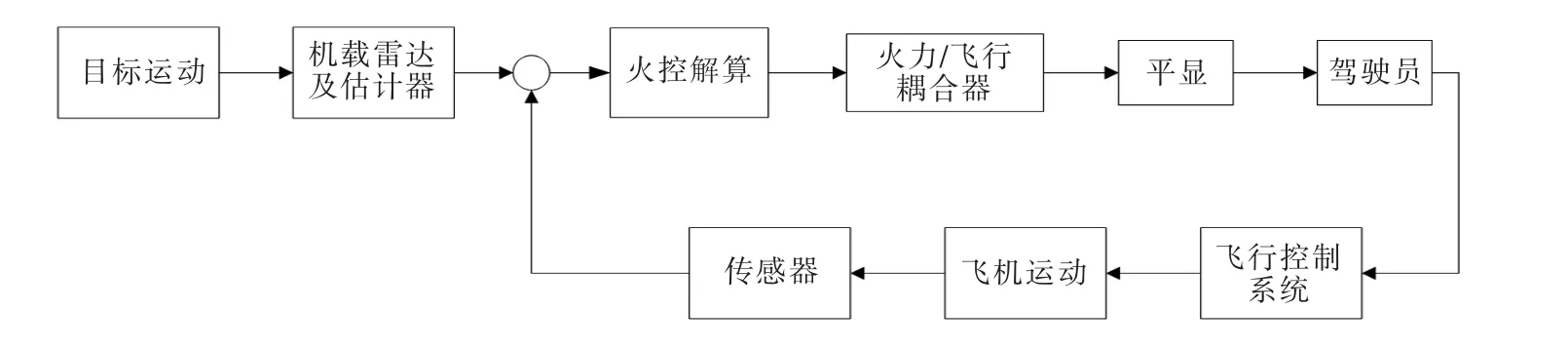
图1 机动攻击指引系统结构框图
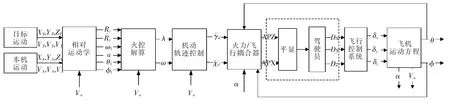
图2 机动攻击指引系统工作原理图

图3 机翼非水平自动攻击系统工作原理图
机翼非水平自动攻击系统的工作原理为:先由目标运动环节和本机运动环节给出各自在地面坐标系上的位置分量,经过相对运动学解算得到本机与目标在视线坐标系上的相对运动关系,然后送到火控解算环节进行解算;火控解算环节的主要任务是依据机动攻击过程的二维轰炸矢量图,求解机动过载、方位瞄准角、期望转弯角速度、待投时和炸弹下落时间;机动轨迹控制根据方位瞄准角和期望转弯角速度,计算转弯加速度矢量及其与地平面的夹角,由转弯加速度确定飞机航迹倾斜角速度和航迹滚转角速度,并将其送入火力/飞行耦合器;火力/飞行耦合器的作用是对火控给出的信息进行分析,然后按照一定的控制策略去操纵飞机,生成飞控系统的控制指令;此指令输入到飞行控制系统去控制飞机的姿态,使飞机达到瞄准和射击精度要求;同时本机传感器又将本机的姿态反馈到本机运动环节与目标运动环节进行比较,从而构成一个大的闭环非线性复杂控制系统。
对于攻击决策、目标获取、进入和退出机动、系统设备需求等方面不做具体探讨。为了使从飞机上投下的炸弹能落到指定点爆炸,必须引导飞机到正确的投弹点。因此需了解本机相对目标的运动规律及飞机上投下炸弹的运动规律。
1.2 目标与本机的相对运动学
由光/电传感器、机载火控雷达及目标状态估计器提供的目标运动信息和飞机传感器提供的自身状态信息,可知在每一时刻,目标相对于本机的位置由三个量决定:两者相对距离R_t(视线距离)、视线相对于地面坐标系的俯仰角θl和方位角ψl,它描述了某时刻目标相对于本机的静态位置量,即描述了目标与本机之间的相对位置;而用于预测目标未来位置的动态量有目标加速度at,视线角速度ωl及相对距离变化率R˙t,上述六个量完全描述了本机与目标之间的相对位置和未来相对运动关系。
在实际系统中,为提高目标参数的准确性,必须设置一个目标状态估计器,该目标状态估计器为在机载火控计算机中实现的一种滤波预测算法。由它实时处理本机飞行状态及目标运动参数的测量信息,获得目标位置、速度、加速度的精确估值,作为火力控制系统的输入。但在理论仿真阶段,暂不引进目标估计器,而由目标运动环节直接给出。地面坐标系下,机动攻击瞄准状态矢量图如图4所示。目标运动环节信息流程图如图5所示。
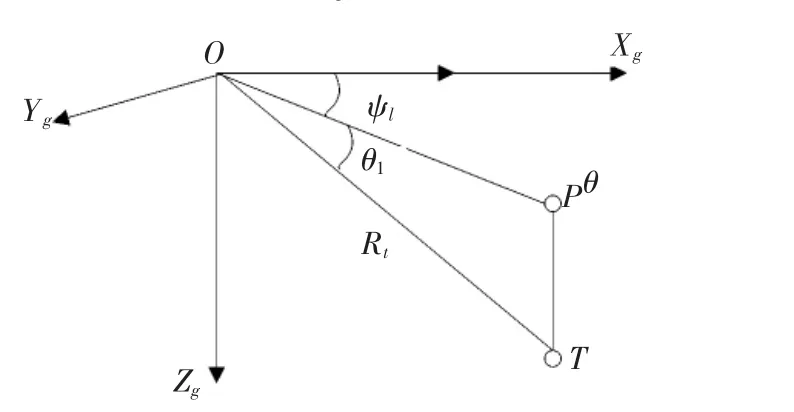
图4 机动攻击瞄准状态矢量图

图5 目标运动环节信息流程图
1.3 火控解算原理
火控解算的目的是根据相对运动学提供的视线距离Rt、相对距离变化率R˙t、视线对地面坐标系的俯仰角θl和方位角ψl及视线角速度ωl、目标加速度at,结合机翼非水平机动攻击的轰炸矢量图和二维轰炸矢量图,求解机动所需的过载nz,由过载限制判定能否进行机动攻击;求解机动攻击所需的目标方位角λ、期望转弯角速度ω、待投时tf及炸弹下落时间tg。
建立火控解算模型,需做如下假设:
1)暂不考虑雷达天线的零位安装角,即假设机体系与雷达系重合;
2)不考虑目标的机动,并假设目标静止;
3)忽略炸弹的安装位置在攻击中引起的加速度;
4)只对机动攻击段建立火力控制方程。
(1)机动过载nz的确定
攻击机动轨迹与飞机当前航向有关,同一位置不同初始航向条件下到达投弹位置圆需要的机动过载不同;如果当前航向与对目标视线夹角为直角,则需要的机动过载最大,这是一种最严格的情况。图6中显示了从不同位置和航向进入的机动攻击轨迹,假定攻击机动轨迹在水平面内,且采用常值过载转向,这样的条件下机动轨迹是一段圆弧。
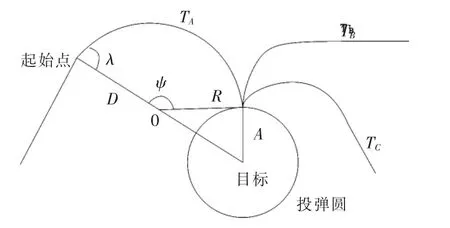
图6 攻击机动轨迹
图6中,A是炸弹射程,以之为半径,弹着点为圆心可以确定一个圆,称投弹圆。如果炸弹要击中目标,则投弹点必须在该圆上,并且炸弹投射方向必须是该圆的径向,即必须瞄准圆心。TA、TB、TC是从不同位置、航向进入攻击的轨迹。R是机动圆弧的半径,它可以由机动过载计算得到。D是机动起始点到目标的距离,λ是飞机航向和对目标或瞄准点的视线之间的夹角,称目标方位角,该角度随飞机飞行逐渐由锐角减小为零,当该角度为90°时,飞机水平机动需要过载达到最大,转弯半径达到最小。ψ是飞机转向角度。显然,在 λ=90°时,有

以飞机当前速度和最大限制过载nzmax,在90°目标方位角时,最小攻击有解距离称为最大过载攻击距离,设为Dmin,如下计算:

有时为了降低飞机被击中的概率,会给出飞机最小机动限制过载,飞机在进行机动攻击时,机动过载不应小于该限制过载。以飞机当前速度和最小限制过载nzmin,在90°目标方位角时,最小攻击有解距离称为最小过载攻击距离,设为Dmax,如下计算:
(2)基本几何关系:
图7为相应轰炸几何学,图中辅助点P位于目标上方,到地面恰好为炸弹在下落时间内由重力作用而移动的距离。投弹点R到辅助点P的连线必定为飞机航迹的切线。
图7 轰炸矢量图
图8为轰炸系统的二维矢量图,图中O为飞机当前位置;R为投弹点;P为火控解算辅助点;T为目标当前位置;B为辅助爆炸点;ω为飞机转弯角速度;Va为飞机地速;W为风速;tf为待投时;tg为弹丸下落时间;Rt为飞机到目标当前位置的距离矢量;Rp为飞机到辅助点的距离矢量;Rbv为投弹点到辅助点的距离;Rb为投弹点到辅助轰炸点的距离;S为转弯中心;Rr为转弯半径;Rs为转弯中心到辅助点的距离;2σ为飞机在剩余时间内方位角的变化量;λ为飞机地速Va与矢量Rp的夹角。

图8 二维轰炸矢量图
由图8可知,在△OPS及△RPS中应用三角形余弦定理可得:
式中,转弯半径:
联合式(6)、式(7)及式(8)可得:

同时,由图8可得投弹距离Rbv与待投时tf的关系。飞机在待投时内改变的方位角为:

在△OPR中应用正弦定理:

又由图7所示轰炸矢量图可得:

给定投弹距离的初始值,联立方程(9)~方程(12),进行迭代运算,即可得待投时tf、期望转弯角速度ω。
(3)计算期望转弯角速度ω:
(4)计算待投时tf:

(5)计算方位瞄准角λ:
根据向量点积定义得:

(6)计算飞机到辅助点的距离矢量Rp:

(7)计算炸弹射程Rbv:
如图9所示,在不计空气阻力的条件下炸弹的无风射程Rbv和落下时间tg,飞机俯冲角为可根据式(17)、(18)求解:


图9 弹丸飞行轨迹
1.4 机动轨迹控制
在前述轨迹参数计算中得到了攻击机当前位置、速度矢量和瞄准点位置、期望转弯角速度、炸弹射程之间的关系,机动过程中飞机当前速度矢量是确定的,而飞机姿态和机动过载及炸弹射程是可以控制的。给定炸弹射程则可以确定期望的转弯角速度,继而得到加速度矢量,由此可以确定飞机航迹倾斜角速度和航迹滚转角速度导引指令。Va与Rp所形成转弯平面的法向矢量,如图10所示。
图10 转弯加速度矢量

则期望转弯加速度ad的方向为:

ad与地面坐标系中矢量的夹角为:

ad与地平面的夹角为:

飞机航迹倾斜角速度导引指令为:
飞机航迹滚转角速度导引指令为:

火控解算流程如图11所示。

图11 火控解算流程图
1.5 火力/飞行耦合器设计
火力/飞行耦合器是机动攻击指引系统的重要组成部分,其性能的优劣将直接影响整个系统的性能好坏。最基本的火力/飞行耦合器只是简单将火控系统解算得到的信息传递给飞行控制系统,这种结构不能达到机翼非水平机动攻击对它的要求,也达不到精确攻击的目的。在自动机动攻击系统中,火力/飞行耦合器是用来取代驾驶员,对火控给出的信息进行分析,然后按照一定的控制策略去操纵飞机,使其跟踪目标运动并进行精确瞄准。在机动攻击指引系统中,火力/飞行耦合器将飞行操纵指引指令送入平视显示器显示给驾驶员,由驾驶员依提示操纵飞机完成机动攻击。
在本文设计的火力/飞行耦合器中,主要由相位补偿网络和飞行操纵指令解算模块组成。相位超前网络可以补偿由于飞行控制系统带来的相位滞后,使飞行控制系统获得超前的指令信号,快速进入跟踪瞄准运动状态。飞行操纵指令解算模块生成纵向过载指令APZ和滚转角速率指令APX送入飞行控制系统,操纵飞机实现目标跟踪和精确瞄准。
根据飞机动力学,俯仰角θ=γ+α,因此纵向导引的期望俯仰角:

设侧向导引期望滚转角指令为φd,由滚转姿态飞机的受力情况,可得

从而

于是可得火力/飞行耦合器的结构图如图12所示。图中参数 τ1、a1、τ2、a2可用随即射线法设计。取a1=a2=0.2,τ1=0.4242,τ2=0.8711。

图12 火力/飞行耦合器结构图
2 机翼非水平机动攻击的数字仿真
目标位置在地面坐标系中输入,地理坐标北向为X轴正方向,Y轴向东,Z轴向上;飞机初始位置为坐标原点,航向为正北,使用200kg级普通航空低阻非制导炸弹,投放时认为炸弹初速就是飞机当时速度,抛射角为飞机俯仰角,无弹射速度;攻击目标为地面静止目标,高度为零;假定目标区内风速为零。
设定飞机在低空高度转弯时进行轰炸,即飞机以恒定的角速度进行水平转弯,同时开始瞄准目标,且实时修正飞机姿态,在待投时为零时,飞机恰好处于平飞状态且机头对准目标,此时发出投弹指令信号,随后以60°滚转角进行转弯退出,攻击过程为全权限自动控制。表1中给出了飞机初始参数及攻击结果。
由机翼非水平机动攻击结果可知:仿真炸弹投射高度为499.2m,与理论投弹高度500m不一致,导致弹着点与目标位置存在误差,误差为1.65m。
机翼非水平机动攻击的三维立体图和X-Y平面二维图如图13所示,机翼非水平机动攻击的数字仿真结果如图14所示。
图14-4和14-6是纵向过载指令和滚转角速率指令,在机动攻击指引系统中将此信号送入平视显示器供驾驶员参考,对于驾驶员而言仅能区分出飞行操纵极性,不能得出需要操纵的杆位移量。纵向过载指令和滚转角速率指令需经指令成型模块反运算得到相应的杆位移(注:本文尚未分析指令成型模块的工 作原理)。

表1 机翼非水平机动攻击结果
图14(g)、图14(h)和图14(i)是纵向过载、待投时和投弹指令信号。在攻击机动中纵向过载限制在0~4g,随着机动轨迹的不断变化,待投时不断地减小,当待投时减小为零时,飞机处于平飞状态且对准目标,此时发出投弹指令,完成机翼非水平机动攻击。若机动过载超出限制范围,则攻击失败。

图13 机翼非水平机动攻击三维立体图(a)和X-Y平面二维图(b)
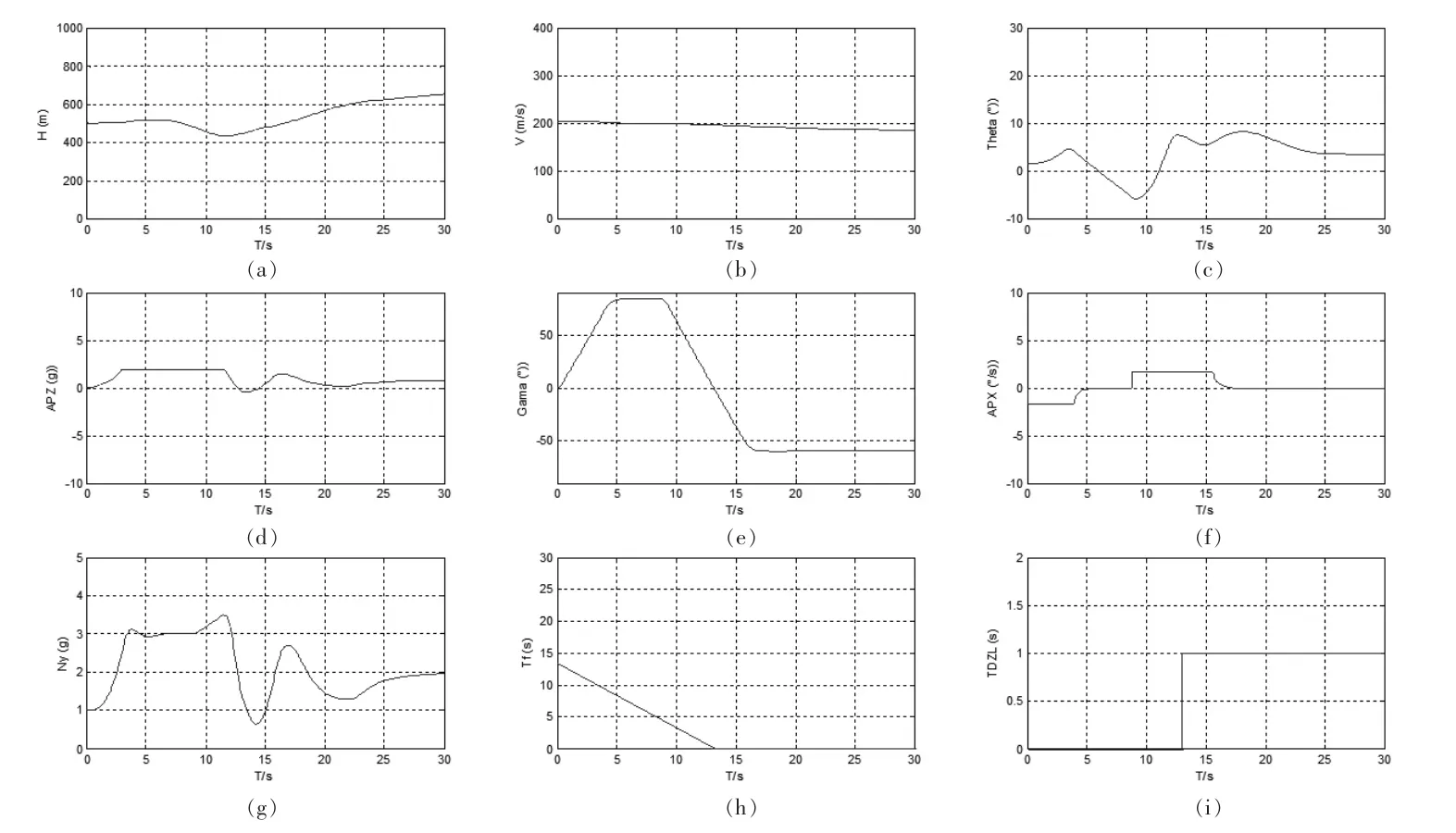
图14 机翼非水平机动攻击的数字仿真结果
3 结论
本文给出的机翼非水平机动攻击的火控解算模型是正确的,火力/飞行耦合器生成的飞行指引指令是有效可行的,能够帮助驾驶员实现瞄准攻击的目的。文中未考虑雷达天线的零位安装角、目标的机动和炸弹的安装位置引起的加速度,与实际作战过程存在差异,在以后的工作中将进一步深入研究和分析,使其早日在现役飞机上应用。
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
学校教育研究(2021年14期)2021-09-06
政工学刊(2021年8期)2021-07-31
政工学刊(2021年4期)2021-04-13
房地产导刊(2020年7期)2020-08-24
兵器装备工程学报(2020年3期)2020-04-22
小学生学习指导·小军迷联盟(2019年3期)2019-09-10
小学生学习指导(小军迷联盟)(2019年3期)2019-03-11
中学课程辅导·教师通讯(2018年10期)2018-09-04
