
地形跟随航迹规划
2019-11-13 06:21:08陈孔锦赵文娟黄勇强
教练机 2019年3期
陈孔锦,赵文娟,黄勇强,桑 岚
(航空工业洪都,江西 南昌,330024)
0 引言
低空、超低空突防是飞行器利用地球曲率对雷达探测的避让、地形对雷达探测的遮挡以及地杂波对雷达探测的干扰进行近地飞行、加强隐身效果从而完成对敌防区的突然打击。
低空、超低空突防的机动包括地形跟随(Terrain Following,TF)、地形回避(Terrain Avoiding,TA)和威胁回避(Threat Avoiding,TA)。地形跟随指的是飞行器对于遇到的地形、建筑等障碍物进行纵向机动飞越此类障碍物。地形回避指的是飞行器对于遇到的地形、建筑等障碍物进行横向机动绕开此类障碍物。威胁回避指的是飞行器对于遇到的敌方防空阵地进行横向机动避开此类威胁。传统的地形跟随一般基于地形跟随吊舱完成,地形跟随吊舱由地形探测雷达和地形跟随控制器组成,飞行器在飞行过程中由地形探测雷达实时探测前方一定范围的地形,由地形跟随控制器控制飞行器飞行,控制方法包括适应角法、雪橇法等。这种传统的地形跟随方法由于需要用地形探测雷达不间断探测地形,很容易受到敌方防辐射武器攻击。同时由于地形探测雷达无法探测山背面的地形,当飞行器飞越山顶时,需要飞到较高的位置才能探测到山背面的地形,在该位置进行地形探测很容易被敌方发现。因此,基于地形探测雷达的低空、超低空突防的效果并不理想。
效果较好的低空、超低空突防基于数字地形库完成。飞行员在低空突防系统中设置好起始点和目标点后,系统自动规划参考航迹,飞行器在卫星导航系统辅助下沿参考航迹自动由起始点飞往目标点,参考航迹在飞行过程中可根据探测到的威胁实时调整。由于这是无源技术,隐身效果较好。同时由于在低空突防中飞行器是自动飞行的,避免了飞行员的紧张、疲劳,因此适用于长距离超低空突防。
本文基于数字地形采用综合航迹平滑算法进行地形跟随参考航迹规划。
1 地形跟随航迹规划
地形跟随航迹规划采用综合航迹平滑算法,该方法类似于信号处理中的“地形高程平滑算法”。
为避免导航系统定位误差、数字地形精度误差和飞机飞行偏差造成的撞山、撞地风险,将飞行航线左右一定距离的最高地形高程作为飞行航线处的地形高程,然后将沿飞行航线的全程地形高程整体抬起一个最小离地安全高度,以抬升后的地形高程作为地形跟随的初始参考航迹。如果这条初始参考航迹不能被飞机所实现,也即航迹上某些点对飞机的机动性能要求过高,那么就按照一定的算法对这些点进行处理。
这里考虑的飞机机动性能包括最大航迹爬升角和最大法向过载,最大航迹爬升角对应参考航迹中每一点的坡度,最大法向过载对应参考航迹中每一点的曲率。
当程序检测到参考航迹上有不满足航迹爬升角或法向过载要求的点时,用坡度限制平滑算法和曲率限制平滑算法分别对这些点的坡度和曲率进行调整,同时对参考航迹所有点进行整体迭代调整,直到所有点都满足航迹爬升角和法向过载要求。
曲率限制平滑算法对参考航迹进行平滑时,不仅会抬高谷底,同时还会削平谷峰,谷峰的削平给飞行带来极大的不安全,因此在完成对参考航迹的坡度平滑和曲率平滑后,要检测参考航迹的最小离地间距,若其小于安全高度,则要将参考航迹整体抬升,使最小离地间距等于安全高度。
所采用的综合航迹平滑算法,使得到的地形跟随参考航迹不仅满足飞机机动能力限制,而且较贴合地形,也较原地形高,满足地形跟随原则且不会出现撞山撞地危险,保证了飞行安全。
1.1 坡度限制平滑算法
在地形跟随航迹规划过程中,主要考虑飞机的纵向机动能力。根据飞机纵向机动能力,飞机具有最大航迹爬升角限制。如果在飞机前方有一个坡度超过其最大航迹爬升角的山峰,控制指令的要求可能会超过飞机机动能力的限制。因此为安全起见,须对参考航迹的坡度进行限制。当参考航迹点的坡度超过限定的正向或负向坡度时,采用坡度限制平滑算法对参考航迹点进行调整。
坡度限制平滑算法的基本思想是:首先,计算出参考航迹每一点的坡度值;然后对参考航迹的坡度进行限制,使其不超出正向坡度最大值和负向坡度最大值。这两个坡度限制值是根据飞机纵向机动性能设定的。
将沿飞行航线的全程地形高程整体抬起一个最小离地安全高度,得到一条参考航迹序列hi(i=1,2,...,N,N为参考航迹点总数)。 第 i点对应的坡度(斜率)为

其中,dx为参考航迹点水平间距。
将参考航迹允许的最大坡度记为kmax,kmax为正值,kmax定义如下

其中,γmax为飞机进行地形跟随所允许的最大航迹爬升角,γmax为正值。
将参考航迹允许的最小坡度记为kmin,kmin为负值,kmin定义如下

其中,γmin为飞机进行地形跟随所允许的最小航迹爬升角,γmin为负值。
调整各参考航迹点坡度,具体又分为两种情况:
1)正坡度平滑
若ki>kmax,则须减小第i个航迹点的坡度至kmax。根据式(1)和尽量抬高参考航迹点的原则,此时需增大hi-1,增大量 Δhi-1为

调整后第i-1个航迹点的高度为

增大hi-1,减小ki,但ki-1却同时增大,此时需检查ki-1是否小于kmax,若不满足,则须增大第i-2个航迹点高度,从右往左依次递推下去,直到所有航迹点的坡度都小于最大坡度允许值kmax。
2)负坡度平滑
若ki<kmin,则须增大第i个航迹点的坡度至kmin。根据式(1)和尽量抬高参考航迹点的原则,此时需增大hi,增大量 Δhi为

调整后第i个航迹点的高度为

增大hi,增大ki,但ki+1却同时减小,此时需检查ki+1是否大于kmin,若不满足,则须增大第i+1个航迹点高度,从左往右依次递推下去,直到所有航迹点的坡度都大于最小坡度允许值kmin。
由于先从右往左进行正坡度平滑,再从左往右进行负坡度平滑,进行正坡度平滑时,调整的是左边航迹点的高度,进行负坡度平滑时,调整的是右边航迹点的高度,所以负坡度平滑后参考航迹点坡度肯定满足正坡度要求,无需再次进行正坡度平滑。
经过上述坡度平滑后,参考航迹点的坡度ki(i=1,2,...,N)就完全满足要求了,且可使参考航迹的高度增量最小,保证尽量贴近地形原貌,这样就得到了经过最小坡度调整的新的参考航迹。
1.2 曲率限制平滑算法
坡度限制平滑算法虽然解决了飞机最大航迹爬升角限制问题,但没考虑飞机最大法向过载限制问题,因而仍不能保证飞行安全。例如,对于图1所示的峡谷,若按参考航迹1飞行,虽然参考航迹1的坡度满足要求,但由于参考航迹1在谷底的曲率较大,很可能超过了飞机法向过载能力限制,造成飞机飞不出该峡谷。事实上,飞机应该按参考航迹2飞行才是安全的。因此,在地形跟随航迹规划时,必须考虑飞机最大法向过载限制问题。

图1 参考航迹曲率对飞行安全影响
飞机在垂直平面内运动时航迹曲率ρ与法向过载nz具有如下关系

因此,当速度一定时,如果对参考航迹的曲率ρ进行限制,那么飞机进行机动所需的法向过载nz就能得到限制。
将参考航迹允许的最大曲率记为ρmax,ρmax为正值,ρmax定义如下

其中,nzmax为飞机进行地形跟随所允许的最大正法向过载,nzmax为正值。
将参考航迹允许的最小曲率记为ρmin,ρmin为负值,ρmin定义如下

其中,nzmin为飞机进行地形跟随所允许的最大负法向过载,nzmin为负值。
曲率限制平滑算法的基本思想是:计算参考航迹上每一点的曲率ρ,检查其是否满足曲率要求,若不满足,则调整参考航迹点的高度,使参考航迹点的曲率ρ在最小允许曲率ρmin和最大允许曲率ρmax之间,从而使飞机沿该参考航迹运动时法向过载满足要求。
对于经过坡度限制平滑算法处理的参考航迹序列hi(i=1,2,...,N),求出航迹点的一阶中心导和二阶中心导,即可求出曲率。
第i个参考航迹点的一阶中心导为

二阶中心导为

则第i个参考航迹点的曲率为

可见,曲率随二阶中心导减小而减小,随二阶中心导增大而增大。根据式(12),当第i个参考航迹点的曲率太大时,可增大第i个参考航迹点的高度hi,减小二阶中心导,从而减小曲率;当第i个参考航迹点的曲率太小时,可减小第i个参考航迹点的高度hi,增大二阶中心导,从而增大曲率。
1)正曲率平滑
若 ρi>ρmax, 则须减小第i个航迹点的曲率至 ρmax,根据式(12),此时需增大第i个航迹点的高度hi,增大量 Δhi为

调整后第i个航迹点的高度为

2)负曲率平滑
若 ρi<ρmin, 则须增大第i个航迹点的曲率至 ρmin,根据式(12),此时需减小第i个航迹点的高度hi,减小量 Δhi为

调整后第i个航迹点的高度为

1.3 综合航迹平滑算法
上述曲率限制平滑算法,虽然解决了飞机法向过载限制问题,但没有解决飞机最大航迹爬升角和最小离地安全高度限制问题。要解决以上三个限制问题,需要将坡度限制平滑算法、曲率限制平滑算法和安全高度限制结合起来运用,形成综合航迹平滑算法,其算法如下:
1)运用坡度限制平滑算法对参考航迹进行坡度限制;
2)运用曲率限制平滑算法对参考航迹进行曲率限制;
3)检查参考航迹坡度是否满足要求,若满足进行下一步,否则返回1);
4)检查参考航迹高度是否都大于最小离地安全高度,若满足结束算法,否则将参考航迹整体上移,使参考航迹最小离地间距等于安全高度。
上述综合航迹平滑算法充分考虑了飞机进行地形跟随时机动性能和安全性问题,对于不同性能的飞机,只要改变相应的机动性能约束值,即可适用于各种飞机,因此该方法简单实用、适用性强。
2 航迹规划示例
2.1 飞行速度对航迹规划影响
假设飞机分别以速度 300km/h、500km/h和800km/h进行地形跟随,航迹角限制为-15°至30°,法向过载限制为0g至3g,最小离地安全高度为50m,经坡度、曲率平滑后的参考航迹如图2所示。从图中可以看出,曲率平滑不仅会抬高谷底,而且会削平谷峰,相同法向过载限制下,速度越大,转弯半径越大,曲率越小,谷峰被削平得越多,谷峰被削平会降低航迹离地安全间距,甚至会危及飞行安全,因此在曲率平滑后要检查参考航迹离地间距是否都大于最小离地安全高度,若不满足,要将参考航迹整体上移,使参考航迹最小离地间距等于安全高度。经安全高度限制后的参考航迹如图3所示。从图中可以看出,速度越大,参考航迹需整体上移越多,参考航迹的整体上移虽然保证了飞行安全,但也可能会降低地形跟随的隐身效果,因此在长距离地形跟随航迹规划中,可采用分段规划的方法,尽可能减小为保证局部安全高度造成的参考航迹整体上移。同时,飞机在地形跟随时,可以小速度飞行,小速度飞行转弯半径小,机动性强,飞机可以更贴近地面飞行。
2.2 法向过载限制对航迹规划影响
假设飞机以速度800km/h进行地形跟随,航迹角限制为-15°至30°,法向过载限制分别为0g至3g、-1g至4g和-2g至5g,最小离地安全高度为50m,经坡度、曲率平滑后的参考航迹如图4所示。从图中可以看出,相同速度下,法向过载越大,转弯半径越小,曲率越大,谷底被抬高得越少,谷峰被削平得也越少。经安全高度限制后的参考航迹如图5所示。从图中可以看出,法向过载限制值越大,参考航迹整体上移越少,因此飞机在地形跟随时允许的法向过载越大,机动性越强,越能贴地飞行。

图2 经坡度、曲率平滑的参考航迹(不同速度)

图3 经坡度、曲率平滑和安全高度限制的参考航迹(不同速度)
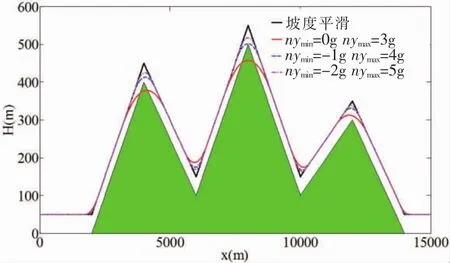
图4 经坡度、曲率平滑的参考航迹(不同法向过载限制)
2.3 飞行姿态对航迹规划影响
上述航迹规划默认飞机全程以正飞姿态进行地形跟随,地形跟随时法向过载最小值通常发生在飞机飞越山顶时,此时法向过载小于1甚至为负值,法向过载为负值时,飞行员处于红视状态,因此,为保证飞行员舒适性,法向过载下限值不能太小,这样造成飞机飞越山顶时机动性减弱,转弯半径增大,为保证安全离地间距,参考航迹需整体上移较大高度。为此,在飞机飞越山顶前,可考虑让飞机滚转至倒飞状态,让飞机以倒飞形式飞越山顶,这样飞机就能以较大的正过载飞越山顶,既能保证飞行员舒适性,又能充分发挥飞机的机动性,减小转弯半径,减小参考航迹整体上移,保证飞机更贴近地面飞行。现假设飞机以速度800km/h进行地形跟随,以倒飞形式飞越山顶,全程法向正过载限制为3g,航迹角限制为-15°至30°,最小离地安全高度为50m,图6和图7给出了规划航迹,图中也给出了以正飞形式飞越山顶的规划航迹,以正飞形式飞越山顶时法向过载限制为0g至3g,从图中可以看出,以倒飞形式飞越山顶可以明显增大参考航迹曲率,减小转弯半径,减小参考航迹上移,使飞机能够更加贴近地面飞行。

图5 经坡度、曲率平滑和安全高度限制的参考航迹(不同法向过载限制)
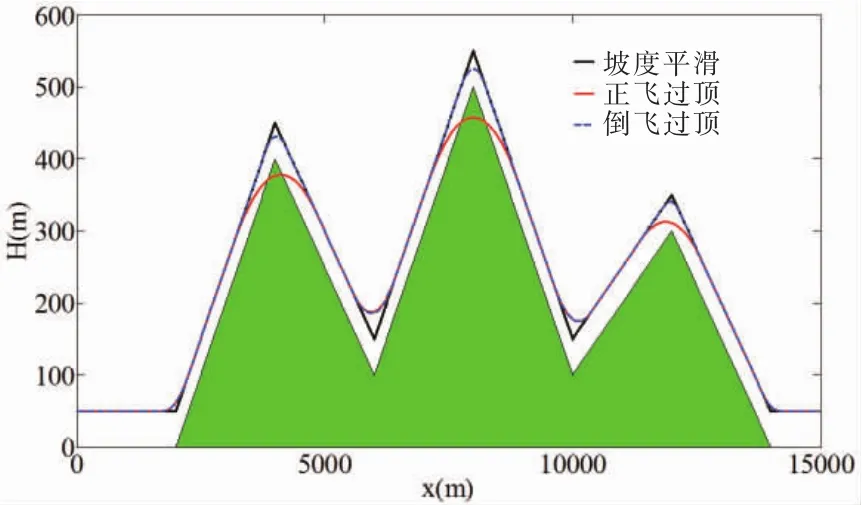
图6 经坡度、曲率平滑的参考航迹(正飞、倒飞过顶)
2.4 航迹爬升角限制对航迹规划影响
假设飞机以速度300km/h进行地形跟随,航迹角限制分别为-5°至 10°、-10°至 20°和-15°至 30°,法向过载限制为0g至3g,最小离地安全高度为50m,经坡度、曲率平滑和安全高度限制后的参考航迹如图8所示。从图中可以看出,航迹角限制值越大,飞机机动性越强,在陡峭山区进行地形跟随时,就能更贴近地形飞行。
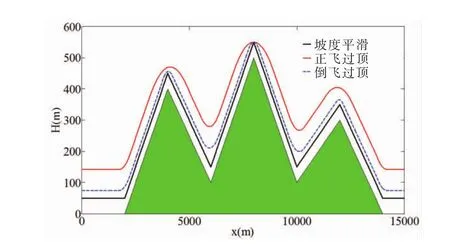
图7 经坡度、曲率平滑和安全高度限制的参考航迹(正飞、倒飞过顶)

图8 经坡度、曲率平滑和安全高度限制的参考航迹(不同航迹角限制)
3 结论
飞机进行地形跟随所允许的法向过载和航迹爬升角越大、飞行速度越小,越能贴近地形飞行。飞机以倒飞形式飞越山顶能够获得比正飞形式更大的机动过载,从而能更贴近地形飞行,同时保证了飞行员的舒适性。为避免局部安全高度限制问题导致规划航迹整体上移,在长距离地形跟随中可分段规划航迹。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:28:26
数学物理学报(2022年4期)2022-08-22 04:07:52
水文地质工程地质(2022年2期)2022-04-13 09:02:34
青年歌声(2019年12期)2019-12-17 06:32:32
数学物理学报(2019年5期)2019-11-29 07:46:28
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
光学精密工程(2016年1期)2016-11-07 09:02:03
中国铁道科学(2015年4期)2015-06-21 06:46:02
舰船科学技术(2015年8期)2015-02-27 15:38:47
