
一种操纵面的气动交叉耦合解耦方法
2019-11-13 06:21:18陈建东罗剑波
教练机 2019年3期
栗 莉,陈建东,罗剑波,罗 帅
(航空工业洪都,江西 南昌,330024)
0 引言
传统上,飞行器的外形设计以得到良好的气动特性为主导,但由于目前战争攻防对抗的加剧,使得飞行器的外形设计除考虑气动性能外,还需考虑更多的因素,例如:内埋发射、折叠及隐身等。兼顾这些因素进行飞行器气动外形设计可能导致飞行器的气动参数出现强耦合的特性,必须进行解耦才能对飞行器进行有效控制。本文说明了飞行器气动特性存在横侧向操纵交叉耦合时的一种控制操纵解耦方法 (注:本文飞行器本体坐标系x轴位于纵向平面向前,y轴位于纵向平面向上,z轴向右与x、y轴构成右手直角坐标系)。
1 数学描述
1.1 小扰动模型方程
根据六自由度动力学方程及小扰动线性化方法[1],建立横侧向小扰动微分方程组,将其它影响量均略去,仅考察操纵的影响,有:

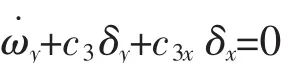
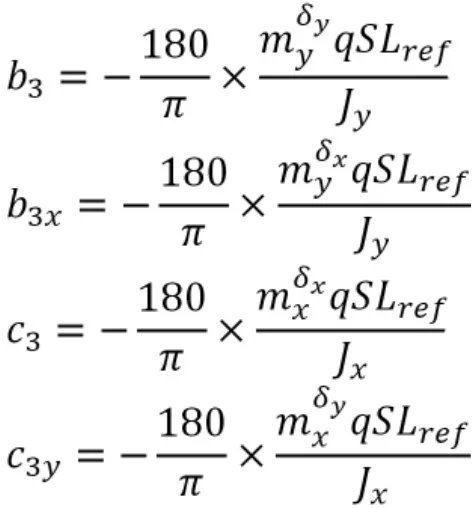
式中系数为:

符号说明:ωx,倾斜角速度;ωy,航向角速度;q,动压;S,气动参考面积;Lref,力矩参考长度;Jx,绕x轴转动惯量;Jy,绕y轴转动惯量;Jxy,横侧向(xy)惯性积;δx,倾斜舵偏角;δy,航向舵偏角;mx,倾斜力矩系数,加上标则表示对应的偏导数;my,航向力矩系数,加上标则表示对应的偏导数。
各系数参数的物理意义:
b3:表征了航向舵的操纵能力,即单位航向舵偏角产生的航向角速度的导数。
b3x:表征了倾斜舵对航向运动的耦合程度,即单位倾斜舵偏角产生的航向角速度的导数。
c3:表征了倾斜舵的操纵能力,即单位倾斜舵偏角产生的倾斜角速度的导数。
c3y:表征了航向舵对倾斜运动的耦合程度,即单位航向舵偏角产生的倾斜角速度的导数。
另,上式中,若存在:Jx≫Jxy、Jy≫Jxy,上述系数可简化为:
一般情况下,上述简化式仅在定性理解中使用;在实际计算各系数时,虽然横侧向惯性积Jxy较小,但仍将横侧向操纵面的气动交叉耦合项系数以及Jxy引起的横侧向交叉运动综合描述,不进行简化。
该耦合产生的主要原因是飞行器的外形设计受到了内埋发射、折叠及隐身处理的约束,导致了总体在气动外形设计过程必须对其作出部分牺牲;因而无法实现以往型号中各通道独立操纵的气动外形设计方案。基于此型号背景,本文对“横侧向交叉耦合较为显著”的操纵面气动耦合特性,给出了一种针对性的解耦方法。
1.2 无解耦控制回路图
使用无耦合的弹体模型(将耦合项直接置零),基于经典方法设计自动驾驶仪。
在无解耦措施时,控制回路图如图1、图2。
将横侧向通道独立设计的驾驶仪带入耦合弹体模型,由于b3x/b3>0.1,c3y/c3>0.1,气动交叉耦合的情况较为显著,导致设计的飞行器自动驾驶仪无法稳定机体,进而导致姿态发散。
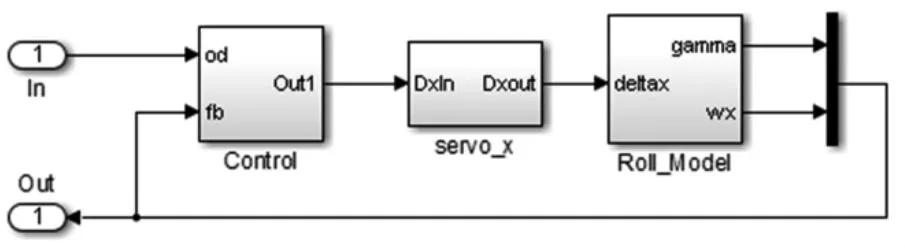
图1 自动驾驶仪倾斜通道独立控制闭环回路模型图
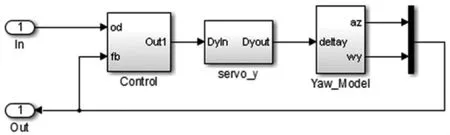
图2 自动驾驶仪航向通道独立控制闭环回路模型图
2 解耦措施
引入解耦矩阵对通道舵面进行解耦。将控制信号输出经过一个解耦矩阵解耦后驱动伺服机构。
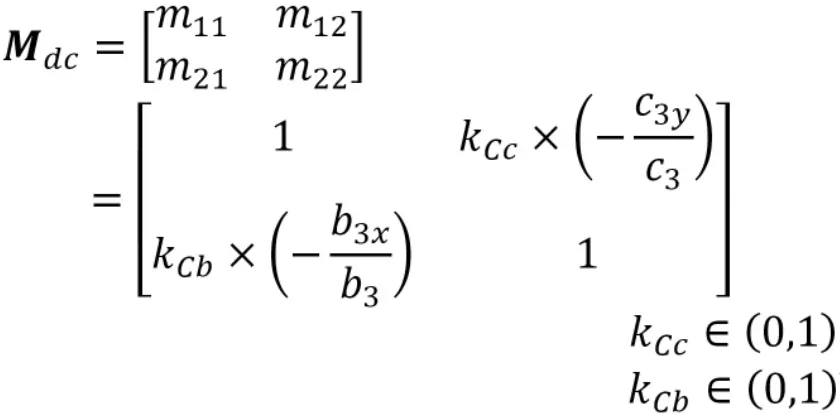
2.1 解耦矩阵
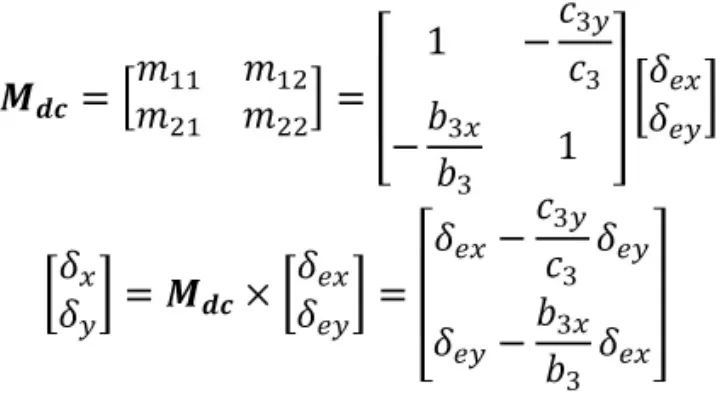
定义:
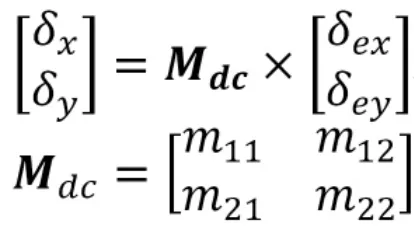
式中:
1)δex、δey为解耦前的倾斜与航向通道的舵面指令(简称通道指令,对应于图3中decoupling模块的输入 dey,dex)。
2)δx、δy为解耦后的倾斜舵与航向舵的偏转指令(简称舵偏角指令,对应于图3中decoupling模块的输出 dy,dx);
回路图如图3:
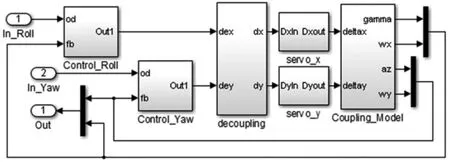
图3 自动驾驶仪基于耦合模型的控制闭环回路模型图
显然,横侧向独立控制时,相当于:

此时倾斜与航向舵偏角指令直接等于通道指令,单独操纵δex或δey均会同时产生ωx与ωy,即自动驾驶仪状态为无解耦状态。
令:
将 δx与 δy代入小扰动方程可知, 此时仅受 δex影响、仅受δey影响,即自动驾驶仪状态为完全解耦状态。
2.2 归一化问题
释义:通过有无解耦矩阵时操纵效果的变化,对比前向增益的变化,并调整参数保证各通道的增益在解耦前后保持不变。
2.2.1 倾斜通道
考虑单位指令u作为倾斜通道指令输入,对于无解耦状态,倾斜舵偏角指令等于倾斜通道指令,此时由操纵产生的运动效果为:
对于完全解耦状态,倾斜与航向舵偏角指令为:

此时由操纵产生的运动效果为:
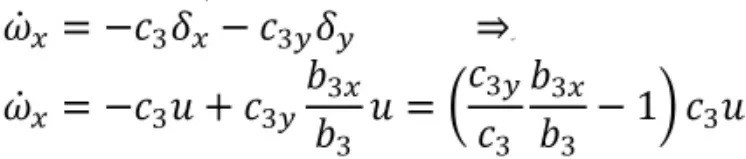
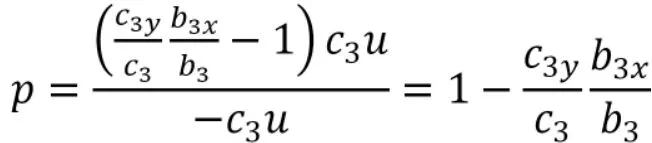
所以有解耦与无解耦时两者的操纵效果比值为:
2.2.2 航向通道
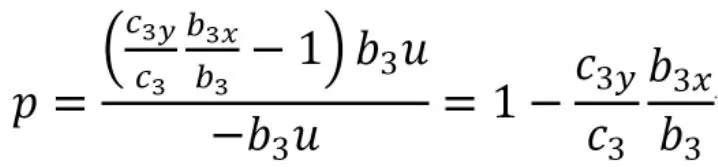
考虑单位指令u作为航向通道指令输入,对于无解耦状态,航向舵偏角指令等于航向通道指令,此时由操纵产生的运动效果为:

对于完全解耦状态,倾斜与航向舵偏角指令为:

此时由操纵产生的运动效果为:

所以有解耦与无解耦时两者的操纵效果比值为:
2.2.3 部分解耦状态
由于气动系数的不确定性,为避免过解耦现象出现,常在完全解耦的基础上乘以一百分比,即称为部分解耦。对于部分解耦状态:
依据上文两个小结的方法,容易证明,部分解耦状态下:
倾斜通道增益变化为原值的倍数如下:

航向通道增益变化为原值的倍数如下:
归一化处理
对解耦矩阵的归一化处理:
定义(续2.1节):
1)δex、δey为解耦前的倾斜与航向通道的舵面指令(简称通道指令,对应于回路图中decoupling模块的输入 dey,dex)。
2)δux、δuy为归一后的倾斜与航向通道的舵面指令(简称归一指令);
3)δx、δy为解耦后的倾斜舵与航向舵的偏转指令(简称舵偏角指令,对应于回路图中decoupling模块的输出 dy,dx)
定义系数:
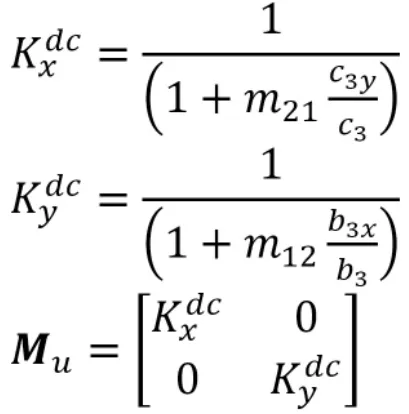
解算关系:

在实际分析及参数选取过程中,可以不将矩阵归一化就直接分析选参,则各通道选出的参数值是适应未归一化的解耦矩阵的,即选定的控制参数包含了矩阵解耦所带来的增益变化,已考虑其影响。
某些时候一定要将解耦矩阵做归一化处理,则有两种情况:
第一种是在做归一化之前已经选定参数,那么必须将倾斜与航向通道所选的参数均乘以相应的与归一化系数对应的比例系数。
第二种是尚未选参,此时可直接根据归一化后的模型进行分析选参,则各通道选出的参数值是适应归一化的解耦矩阵的。
2.3 解耦产生的效果
将该方法应用于实际工程,设计某型号自动驾驶仪,并通过仿真试验及飞行试验验证,可以达到以下效果:
未解耦时的现象:
使用非耦合的机体数学模型设计的参数能够使倾斜及航向通道稳定,并保证满足指标要求;但代入耦合机体数学模型后,系统不稳定,更无法进行下一步的性能优化设计及仿真验证工作。
解耦后:
使用非耦合的机体数学模型设计的参数能够使倾斜及航向通道稳定,并保证满足指标要求;代入耦合机体数学模型,并采用解耦矩阵解耦后,系统稳定。从零极点图上体现较为明显,原导致不稳定的右侧极点附近存在一个几乎重合的零点,两者抵消;系统由不稳定变为稳定。而对于稳定的控制系统,则可以开展下一步的性能优化设计及仿真验证工作。
3 结论
对于横侧向气动操纵面交叉耦合较为显著的飞行器,采用解耦矩阵对气动操纵面耦合进行直接解耦的方法,可以使采用各通道独立设计方法设计时不能稳定的系统稳定,为进一步优化设计性能奠定了基础。
猜你喜欢
军民两用技术与产品(2021年8期)2021-11-24 01:09:36
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
中国惯性技术学报(2018年4期)2018-11-08 10:56:42
物理教学探讨(2018年1期)2018-02-13 09:26:52
电子制作(2017年24期)2017-02-02 07:14:16
电子设计工程(2015年6期)2015-02-27 12:05:09
法大研究生(2015年2期)2015-02-27 10:13:55
