
隔离飞行器滚转的惯性导航系统方案设计
2019-11-12 09:06石宝兰杨宇和
导弹与航天运载技术 2019年5期
石宝兰,韩 璐,黄 宇,郑 新,杨宇和
(北京宇航系统工程研究所,北京,100076)
0 引 言
飞行器新的弹道模式具有马赫数高、动压大、攻角大的特点,滚动通道面临更大干扰。为节约安装空间和重量,考虑取消滚控装置、放开滚动通道的新思路。无滚控方案需要解决的首要问题是:飞行器滚转角速度太大,引起动态误差,严重影响箭载惯性导航系统(Inertial Navigation System,INS)的导航精度,甚至超出惯性仪表测量范围。因此,需要研究能够解决大滚动角速度对惯性仪表性能影响问题的新型惯导方案。
隔离飞行器滚转的单轴稳定平台惯性导航系统方案正是这样一种有效途径。该方案将惯性测量组合(Inertial Measurement Unit, IMU)安装在沿滚动方向的稳定平台上,通过伺服电机驱动单轴平台相对于箭体反旋,隔离滚动方向的大姿态角速度,为IMU提供平稳的测试环境。
挪威企鹅Mk3战术弹的惯导系统采用的是一种半捷联式惯性导航系统,能够使惯性平台适应导弹在发射和转弯机动飞行时的高滚动角速度。其俯仰轴和偏航轴采用捷联式安装,而滚动陀螺通过滚动框架用于稳定部件的稳定。任建新[1]研究了一种用于高速自旋飞行器上的新型单轴稳定捷联惯导系统(Strapdown Inertial Navigation System,SINS),设计了适用于单轴稳定SINS的力学编排,保证了导航定位精度。王晨[2]研究了火箭弹大动态单轴平台惯导系统的姿态算法,搭建了样机,并通过了半实物仿真验证。
1 系统总体方案
目前,惯导系统主要有两种结构形式:平台式和捷联式。对于自旋高精度飞行器,这两种导航方式都难以解决无滚控方案下大滚动角速度对惯性仪表性能影响的问题。因此,结合平台式和捷联式惯导的特点,提出隔离滚转的单轴稳定平台惯导系统方案。该方案主要由IMU、单轴稳定平台框架、直流力矩电机、光电码盘4个部分构成,如图1所示。

图1 隔离滚转的惯导系统组成示意Fig.1 Component Diagram of the Roll-isolated INS
由图1可知:IMU安装于可单轴旋转的稳定平台框架上,单轴稳定平台框架旋转轴与载体滚动轴平行。载体滚动时通过单轴平台的反向转动使得IMU不随载体滚动而转动。直流力矩电机用来驱动单轴平台框架转动,光电码盘用来测量框架相对载体纵轴的转动角度和角速度。直流力矩电机和光电码盘的基座与载体固联,转轴与IMU及其单轴平台框架固联。工作过程分析如下:
飞行过程中,在干扰作用下箭体出现绕纵轴滚转,带动直流力矩电机和光电码盘的基座滚转,进而转轴相对基座产生转动。光电码盘输出的脉冲数与相对滚转角成正比,脉冲频率与相对滚转动角速度成正比,因此根据光电码盘脉冲输出即可确定IMU相对箭体的滚转角和滚转角速度。直流力矩电机转轴相对基座转动会产生反电势,若不施加电枢控制电压,则反电势在电机电枢中会产生电流进而产生转矩带动IMU随箭体旋转,此外轴承摩擦力矩也会带动IMU随箭体滚转。为实现单轴平台的稳定功能,根据陀螺测量所得角速度信息、光电码盘测量所得IMU相对箭体的滚转角和滚转角速度,施加电枢控制电压,一方面克服反电势,另一方面产生电枢电流进而产生力矩,克服摩擦力矩,使IMU在箭体纵轴方向不随箭体滚转,保持惯性空间稳定。工作流程如图2所示。

图2 隔离滚转的惯导系统工作流程Fig.2 Workflow Chart of the Roll-isolated INS
2 单轴稳定平台控制系统设计
单轴稳定平台的设计是设计难点:a)影响单轴转台隔离作用的干扰力矩很多,难以精确建模;b)IMU相对惯性空间的角速度及电机相对基座转动角、转动角速度存在测量误差和测量噪声;c)高精度IMU本身体积和质量较大,在箭载环境下,电机的力矩、功率、体积质量都受到限制,进一步增加了平台的设计难度。
在箭体最大角加速度小于10(°)/s2,最大滚动角速度小于1800 (°)/s(5 r/s)的情况下,设计单轴稳定平台的控制方案,以达到如下技术指标:
a)经单轴平台隔离后,IMU相对惯性空间绕箭体纵轴的角速度绝对值小于3(°)/s,角速度积分小于3°;
b)电机最大控制力矩不超过3 N·m,最大电枢电压小于48 V,质量不超过4 kg。
2.1 控制模型
由绕质心动力学方程可得单轴稳定平台的模型为

只考虑滚动控制通道,得:




2.2 控制系统设计
滚动通道单轴稳定平台控制系统采用角速度反馈和角速度积分反馈,其设计目标为:设计最优的使IMU的,和在动态情况下都充分小。

代入状态方程可得:

其特征多项式为


通过调整a,b,c的取值,可设计合适的极点,调整系统的带宽。


控制参数选取过程如下:
c)为简化设计,极点均设置在实轴上,则:

2.3 控制系统仿真分析
单轴稳定平台控制的输出是IMU相对惯性空间绕箭体纵轴的旋转角速度以及角速度积分。
a)仿真输入。
选择某型激光陀螺捷联惯导系统进行仿真分析,仿真时间长度为1200 s。电机时变参数曲线为

电机由正负直流电源供电,最大电枢电压为±48 V,其它固定参数为

IMU的质心偏离旋转轴产生的干扰力矩为

仿真结果如图3~ 5所示。

图3 IMU相对惯性空间角速度积分Fig.3 Angular Velocity Integral to Inertial Space of the IMU
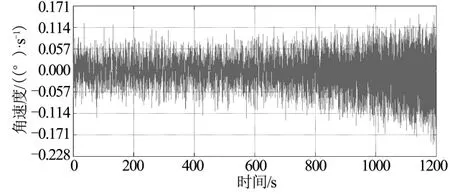
图4 IMU相对惯性空间绕箭体纵轴的角速度Fig.4 Angular Velocity to Inertial Space of the IMU Rolling the Rocket’s X-axis

图5 电机反馈控制力矩Fig.5 Feedback Control Moment of the Motor
仿真结果表明:在上述仿真输入下,IMU相对惯性空间绕箭体纵轴的角速度积分最大为 0.23°,远小于3°;角速度最大不到0.17(°)/s,远小于3(°)/s;电机反馈控制力矩最大为0.2 N·m,远小于3 N·m。可见控制系统参数设计合理,性能满足指标要求,控制方案可行。
3 结 论
本文研究了隔离飞行器滚转的单轴稳定平台惯导系统总体方案,完成了单轴稳定平台控制模型分析及控制方法设计,并通过数学仿真验证了该方案可行。得到如下结论:
a)隔离滚转的单轴稳定平台惯导系统方案结合了平台式和捷联式惯导系统的优点,对陀螺动态测量范围要求低、可提供较高精度导航信息,取消了平台框架设备,降低了系统复杂度;
b)该方案具有体积小、质量轻、成本低的优点;
c)该方案为飞行器无滚控控制系统设计提供了可能性。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
导航定位与授时(2022年1期)2022-02-18
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
家园·电力与科技(2021年3期)2021-09-10
数字海洋与水下攻防(2020年5期)2021-01-04
能源研究与信息(2020年4期)2020-11-25
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
计算技术与自动化(2014年1期)2014-12-12
