
亚轨道高动态飞行器拦截弹道模式研究
2019-11-12 09:06:12余卓阳
导弹与航天运载技术 2019年5期
余卓阳,谢 放,许 伟,田 博,郭 昊
(空间物理重点实验室,北京,100076)
0 引 言
亚轨道高动态飞行器飞行速度快,机动能力强,飞行高度高于防空导弹最大作战高度,能突破现有的防空系统,具有重要的军事价值。为应对亚轨道高动态飞行器的威胁,需开展针对该飞行器防御技术的研究[1~4]。拦截弹弹道模式是影响拦截效果的重要因素,因此,近年来,针对亚轨道高动态飞行器拦截弹道的研究成为热点[5~8]。戴静等[4]在研究亚轨道飞行器拦截问题时借鉴了拦截弹道导弹的思路,设计的拦截弹道模式与弹道导弹末端拦截模式相似,由于亚轨道飞行器轨迹与弹道导弹有明显不同,直接沿用原有的弹道模式造成拦截弹射程偏小,防御范围不够。由于亚轨道飞行器飞行特性与飞机有相似之处,熊俊辉等[7]提出利用空基拦截器进行拦截的思路,拦截弹弹道模式与空空导弹类似;黄春华等[6]为扩大拦截弹射程,采用将拦截弹助推到大气层外再入的方式进行拦截,拦截弹道模式为高抛弹道或再入平飞弹道。上述两种模式扩大了拦截弹射程但没有考虑亚轨道飞行器拦截对防御系统的探测,跟踪提出的巨大挑战,对拦截作战过程中探测、预警、跟踪等其它环节关注不够,而拦截弹作为整个防空反导系统的一环,其弹道模式设计应考虑系统的探测跟踪目标能力并与其相匹配。
防空反导系统根据其探测跟踪目标能力不同,有传统视距拦截和超视距拦截两种作战模式。传统视距拦截作战模式下制导所需的目标信息由单一拦截阵地的火控雷达提供。亚轨道目标飞行高度低,考虑地球曲率的限制,雷达对其最大探测距离约为700 km。另一方面,亚轨道高动态目标飞行速度快,因此,其在火控雷达探测范围内飞行的时间有限,这对拦截系统快速响应提出了很高的要求。
近年来,超视距拦截作战模式[9]成为防空反导作战的研究热点。在超视距拦截作战模式中,可由外部探测系统提供目标信息,指挥系统根据获得的目标信息,在拦截阵地的火控雷达还未探测到目标时即可发射拦截弹。拦截阵地的火控雷达无需跟踪目标,而仅需跟踪拦截弹[10]。该作战模式突破了单一雷达对目标探测范围的限制,放宽了对拦截系统快速响应的要求,可以扩大拦截弹作战范围。
针对上述两种模式设计的拦截弹弹道模式,本文利用参数优化方法和最优控制理论分别对上述两种作战模式下的拦截弹道进行设计,对亚轨道高动态飞行器防御技术研究有一定的参考价值。
1 拦截弹模型
1.1 总体模型
拦截弹采用两级固体火箭发动机助推,助推结束后动能杀伤器(Kinetic Kill Vehicle,KKV)分离并利用姿轨控发动机控制直接碰撞目标。
1.2 运动学和动力学模型
1.2.1 基本假设
为突出主要矛盾,降低弹道设计难度,做出如下基本假设:
a)地球为一均质不旋转圆球;
b)拦截弹,目标在同一垂直平面内飞行;
c)大气模型使用指数大气模型。
1.2.2 运动学和动力学方程
基于1.2.1节的假设,飞行器运动学和动力学方程如式(1)~(4)所示。

2 传统视距拦截作战弹道设计
由于单一雷达探测范围有限,拦截弹最大飞行时间受到约束。考虑目标平飞,拦截弹与目标在同一平面运动的情况,根据图1所示的几何关系,可得:


图1 拦截过程几何关系Fig.1 Geometrical Relationship Between Interceptor and Target
2.1 弹道模式分析
拦截弹弹道根据飞行中高度变化情况可分为自由飞弹道、平飞弹道和高抛弹道 3类[11,12]。自由飞弹道轨迹近似于直线,飞行路程最短但阻力损失大;高抛弹道急剧爬升再回到目标高度,阻力损失小,能量优势大,但增加了飞行路程,飞行时间长。平飞弹道先上升到目标高度后平飞与目标交会,是一种折中的弹道模式。仿真结果表明,高抛弹道飞行时间不能满足拦截弹最大飞行时间约束,因此,选择平飞弹道和自由飞弹道进行设计。
2.2 平飞弹道设计
2.2.1 一级助推段弹道设计
在一级助推段,拦截弹历经亚声速、跨声速、超声速和高超声速,气动特性复杂,直接对攻角进行优化难度较大。因此,首先对攻角进行参数化,然后利用参数优化的方法设计助推段飞行程序。采用亚、跨声速零攻角飞行,超声速气动转弯的方案,攻角可以表示为[13]

一级助推段攻角设计需满足的约束条件如下:
a)最大攻角约束:

b)跨声速段零攻角约束:

c)级间分离小攻角约束:

优化目标为一级助推结束时能量最大:

2.2.2 级间段和二级助推段弹道设计
在级间滑翔段和二级助推段,拦截弹速度已达到高超声速,根据马赫数无关原理,气动系数只与攻角相关,可以利用最优控制理论直接对攻角进行优化。
级间段和二级助推段弹道优化可以转化为一个最优控制问题。
系统状态方程包括式(1)~(4)及拦截弹质量方程:

式中ms为推进剂秒流量。
为保证攻角连续变化,取攻角为状态变量,攻角的导数为控制量:

由式(1)~(4)、(11)、(12)构成系统状态方程。
在平飞弹道中,KKV平飞段射程占据整个射程的60%左右,为提高射程,需提高KKV分离速度。将目标函数取为末速最大和控制能量消耗最少:

式中u为控制变量。
约束分为过程约束和末端约束,过程约束如下:
a)最大攻角约束:

b)最大攻角变化率约束:

c)级间段零攻角约束:

末端约束如下:
a)为保证在KKV分离后,KKV能耗费较少燃料在目标高度H平飞,KKV分离时高度和弹道倾角需满足:

b)KKV分离小攻角约束:

可以利用高斯伪谱法[15]求解式(1)~(4)、式(11)~(19)定义的最优控制问题。
2.2.3 KKV平飞段弹道设计
为实现KKV在目标高度H平飞,须满足:
由式(20)可得,需用过载可以分成两部分:
a)平衡重力,离心力,保证弹道倾角变化率为

b)调整导弹高度到目标高度满足:

则KKV需用过载为

末端约束如下:
a)为保证在KKV分离后,KKV能耗费较少燃料在目标高度H平飞,KKV分离时高度和弹道倾角需满足:

b)KKV分离小攻角约束

可以利用高斯伪谱法[15]求解式(1)~(4)、式(11)~(19)定义的最优控制问题。
2.3 仿真结果
取目标高度40 km,利用2.2节方法对弹道进行设计,并与自由飞弹道进行对比,仿真结果如图2~5所示。由于自由飞弹道保持0°攻角飞行,因此图4中只绘出了平飞弹道的攻角曲线。弹道对比结果如表1所示。

表1 弹道对比结果Tab.1 Contract Result of Trajectory

图2 射程-高度曲线Fig.2 Altitude VS Range

图3 时间-速度曲线Fig.3 Velocity VS Time

图4 时间-攻角曲线Fig.4 Attack Angle VS Time
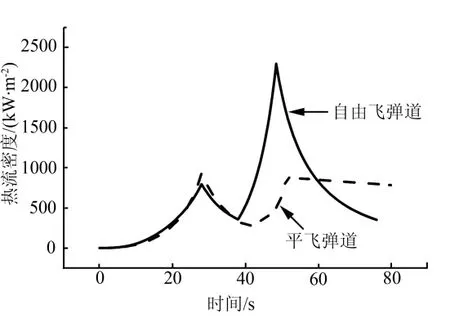
图5 热流密度Fig.5 Heat Flux
由图2~5可知,平飞弹道在射程和末速方面相比自由飞弹道分别提高了27%和29%,而自由飞弹道动热流显著高于平飞弹道,其峰值热流是平飞弹道的2.5倍。同时,平飞弹道通过调整KKV平飞时间即可覆盖82~200 km的射程范围,提高了作战灵活性。综上,平飞弹道相比自由飞弹道有显著的优势,是适合传统视距作战的弹道模式。
3 超视距拦截作战弹道设计
3.1 弹道模式分析
超视距拦截作战模式由于突破了单一雷达探测范围的限制,可放宽拦截弹最大飞行时间的限制以发挥拦截弹能量优势,实现远程拦截。
3.2 高抛弹道
高抛弹道一级助推段设计方法与2.2.1节相同。级间段,二级助推段,KKV飞行段设计方法与2.2.2节相似,但 KKV分离后不平飞,因此,去掉式(17)、(18)的约束。同时,优化目标可选取末端射程最大和控制能量消耗最小的综合指标,即:

利用高斯伪谱法求解上述最优控制问题即可实现对高抛弹道的设计。延长2.2节平飞弹道KKV飞行时间至KKV燃料耗尽,高抛弹道与平飞弹道设计结果如图6~9所示。

图6 射程-高度曲线Fig. 6 Altitude VS Range

图7 时间-速度曲线Fig.7 Velocity VS Time

图8 助推段时间-攻角曲线Fig.8 Attack Angle VS Time in Boost Phase
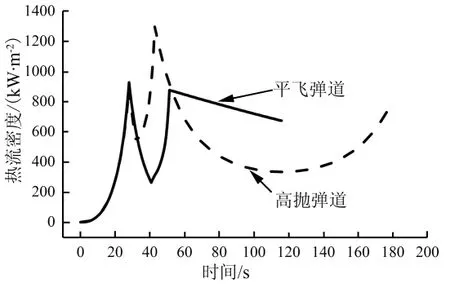
图9 热流密度对比Fig.9 Heat Flux
3.3 弹道模式对比
从图9中可以得出,高抛弹道助推段最大热流大于平飞弹道,但高抛弹道 KKV飞行高度高于目标高度,而平飞弹道KKV在目标高度平飞。因此,高抛弹道KKV飞行段平均热流明显低于平飞弹道。
与2.3节类似,两种弹道模式的对比如表2所示,其中平均热流指KKV飞行段平均热流。

表2 弹道对比结果Tab.2 Contract Result of Trajectory
从表 2可以看出,高抛弹道射程为平飞弹道的1.8倍,末速比平飞弹道高近200 m/s,且KKV飞行段的平均热流显著低于平飞弹道。综上,高抛弹道充分发挥拦截弹能量优势,是更适合超视距拦截作战的弹道模式。
4 结束语
对于亚轨道高动态飞行器拦截弹道模式而言,通过分析发现:a)对于传统视距拦截作战,平飞弹道相比自由飞弹道在射程、末速、热流、动压方面有显著的优势,且通过一条弹道可以覆盖较大的射程范围,是适合传统视距拦截的弹道模式;b)对于超视距拦截,高抛弹道通过高空飞行减少阻力,可以充分发挥拦截弹能量优势,在射程和末速方面有很大的优势,是适合超视距拦截作战的弹道模式;c)超视距拦截作战能够充分发挥拦截弹能量优势,扩展拦截弹的射程。
猜你喜欢
中学生理科应试(2024年3期)2024-06-26 07:54:45
文萃报·周五版(2022年46期)2022-11-25 10:24:42
中学生数理化·高一版(2021年2期)2021-03-19 08:32:18
中国计算机报(2020年9期)2020-03-25 15:10:34
中学生数理化·八年级物理人教版(2018年9期)2018-11-09 01:21:50
北京航空航天大学学报(2017年7期)2017-11-24 05:27:26
汽车与安全(2017年9期)2017-09-29 01:36:57
居业(2017年5期)2017-07-24 13:56:27
北京航空航天大学学报(2016年8期)2016-11-16 01:51:04
艺术时代(2013年5期)2013-04-29 00:44:03
