
运载火箭发射平台垂直度调整控制算法研究
2019-11-12 09:06:34郑国昆丁保民吴齐才
导弹与航天运载技术 2019年5期
郑国昆,邢 然,丁保民,吴齐才
(北京航天发射技术研究所,北京,100076)
0 引 言
垂直度调整是大型设备在安装及运行过程中的关键指标之一,尤其是对于运载火箭而言,在点火前需要对火箭的垂直度进行调整,使其满足起飞要求。运载火箭垂直度调整测试是中国运载火箭在发射测试流程中必须要进行的一项测试工作,垂直度调整是运载火箭初始对准工作的一部分,目的是调整箭体的初始垂直度,以满足火箭姿态精度控制要求[1~6]。
运载火箭通过与发射平台支承臂机械接口竖立在发射平台上,中国运载火箭除新一代大型运载火箭外,均为4个支承臂支承运载火箭箭体的支承方式,故称为“四点支承”。支承臂是发射平台的部组件之一,通过液压动力驱动支承臂可实现支承臂的伸缩运动,运载火箭采用四点支承时,通过对4个支承臂的协调动作,即可实现运载火箭的垂直度调整操作。实际操作时,还需要固连在箭体上的水平度传感器或运载火箭二子级的惯性导航设备实时提供箭体当前的不水平度数值。
1 运载火箭垂直度调整原理
运载火箭垂直度调整原理框图如图1所示。在运载火箭垂直总装的过程中,箭体尾端面的支点坐落到活动发射平台的支承臂上,并通过防风拉杆装置实现与发射平台支承臂的固连,以保持箭体稳定。四点支承方式的4个支点在火箭尾端面呈均匀分布,4个支承臂分别命名为:Ⅰ、Ⅱ、Ⅲ、Ⅳ号支承臂,分别对应运载尾端面的Ⅰ、Ⅱ、Ⅲ、Ⅳ 4个象限。
按照空间几何理论,三点即确定一个平面,而运载火箭采用四点支承的方式,就运载火箭尾端面的运动而言,属于过自由度运动。由于箭体的各支点均有载荷上限要求,为保证垂直度调整过程中,支承臂的升降带来的外力不会导致箭体结构的损坏,在四点支承的条件下,垂直度调整需要满足多点联动控制箭体各支点在同一平面内进行翻转。发射平台支承臂上安装有压力传感器,用于实时监测支承臂与箭体支点间的载荷,载荷在可承受范围内时,垂直度调整可正常进行;当某一支点载荷超过范围时,则单独进行此支承臂的调整,以使四点支承的载荷分布均匀,避免箭体由于载荷过大导致结构受损。
对于四点支承方式的运载火箭,一般采用对角升降方式进行垂直度调整:以任意2个相对的支点连线为轴线,其余两个对角支点同步进行一升一降动作,保证箭体各支点在同一平面内翻转以调整运载火箭垂直度。
运载火箭一子级尾端安装有水平度传感器,并通过电缆连接至水平指示仪用于箭体不水平度的实时显示及数据通信;在运载火箭二子级则利用惯性导航设备检测的箭体姿态不水平度数据进行垂直度调整。
一子级不水平度数据与二子级不水平度数据通过数据交互协议传输至发射平台电气系统,发射平台电气系统依据一子级不水平度数据与二子级不水平度数据,控制液压系统的液压马达转动,通过马达带动蜗轮蜗杆驱动支承臂进行升降动作控制。

图1 运载火箭垂直度调整原理Fig. 1 Principle of the Launch Vehicle Launch Platform Verticality Adjustment
为方便描述垂直度自动调整控制算法,建立坐标系o-x1y1z1如图2所示。原点o选在火箭尾端面的中心;ox1轴与火箭的纵轴重合,指向火箭头部方向为正;oy1轴在火箭Ⅰ-Ⅲ基准面内与ox1轴垂直,指向Ⅲ号支承臂方向为正;oz1轴与ox1轴、oy1轴共同构成右手直角坐标系(指向Ⅳ号支承臂方向为正)。

图2 坐标系建立示意Fig.2 Coordinate System

续图2
在不考虑箭体变形、安装误差等因素的影响时,一子级水平度传感器安装基准面、二子级惯性导航设备安装基准面与o-y1z1平面平行,即一子级水平度传感器及二子级惯性导航设备的不水平度数据与箭体尾端面的不水平度数据等价,但在实际生产安装过程中,引入安装误差不可避免,其中水平度传感器安装基准面与火箭尾端面的不平行度就是重要因素之一。令为水平度传感器安装基准面与火箭尾端面之间的不平行度在箭体坐标系oy1轴上的分量;为水平度传感器安装基准面与火箭尾端面之间的不平行度在箭体坐标系oz1上的分量;为火箭尾端面的不水平度在箭体坐标系 oy1轴上的分量,Ⅲ象限线方向高时,为正,Ⅰ象限线方向高时,为负;为火箭尾端面的不水平度在箭体坐标系oz1轴上的分量,Ⅳ象限线方向高时,为正,Ⅱ象限线方向高时,为负。为水平度传感器测量得到的火箭Ⅰ-Ⅲ象限线方向的不水平度;Ⅲ象限线方向高时,为正,Ⅰ象限线方向高时,为负;为水平度传感器测量得到的火箭Ⅱ-Ⅳ象限线方向的不水平度;Ⅳ象限线方向高时,为正,Ⅱ象限线方向高时,为负。则有:

2 垂直度自动调整控制算法
2.1 垂直度调整流程
运载火箭发射是按照预先设定好的流程逐步进行的,每一个流程都有严格的时间限制,就某型号运载火箭而言,垂直度调整流程时间为10 min,假设垂直度调整流程以接收到指挥系统“开始垂调”指令为开始时刻,若在流程允许时间内不水平度满足垂直度调整指标阈值时,则认为垂直度调整完毕,回复“垂调好”指令给指挥系统,若调整时间超过10 min仍未满足垂直度调整指标阈值,则认为垂直度调整失败,回复“垂调失败”给指挥系统,图3为垂直度调整流程。具体流程描述如下:
a)收到“开始垂调”指令,进入垂直度自动调整流程;
b)启动定时器;
c)手动选择垂直度调整模式,即依据箭体尾端面不水平度或惯性导航设备安装基准面不水平度或二者均有;
d)依据选择的垂直度调整模式,执行对应的垂直度调整控制算法;
e)判断不水平度是否满足阈值要求,若满足,判定为垂直度调整测试结束,回复“垂调好”给指挥系统,转g;若不满足,则继续流程;
f)判断垂直度调整流程耗时是否大于10 min,若大于10 min,则判定为垂直度调整测试超时,回复“垂调失败”给指挥系统,转g;若不大于10 min,则转d;
g)定时器清零重置;
h)流程结束。
垂直度调整流程中,垂直度调整控制算法是发射平台电气系统执行垂直度调整自动控制流程的核心环节,依据流程中使用的不水平度信号的不同,分为一子级与一、二子级联合垂直度调整控制算法,一子级垂直度调整使用箭体尾端面不水平度作为闭环控制算法的反馈信号,一、二子级联合垂直度调整使用两个不水平度作为闭环控制算法的反馈信号;由此可知,3个垂直度调整的控制算法类似,仅在判断各支承臂调整方向的逻辑上,一、二子级联合垂直度调整更为复杂。对控制系统而言,仅为反馈信号源的区别,因此本文以一子级为例进行垂直度调整控制算法说明。
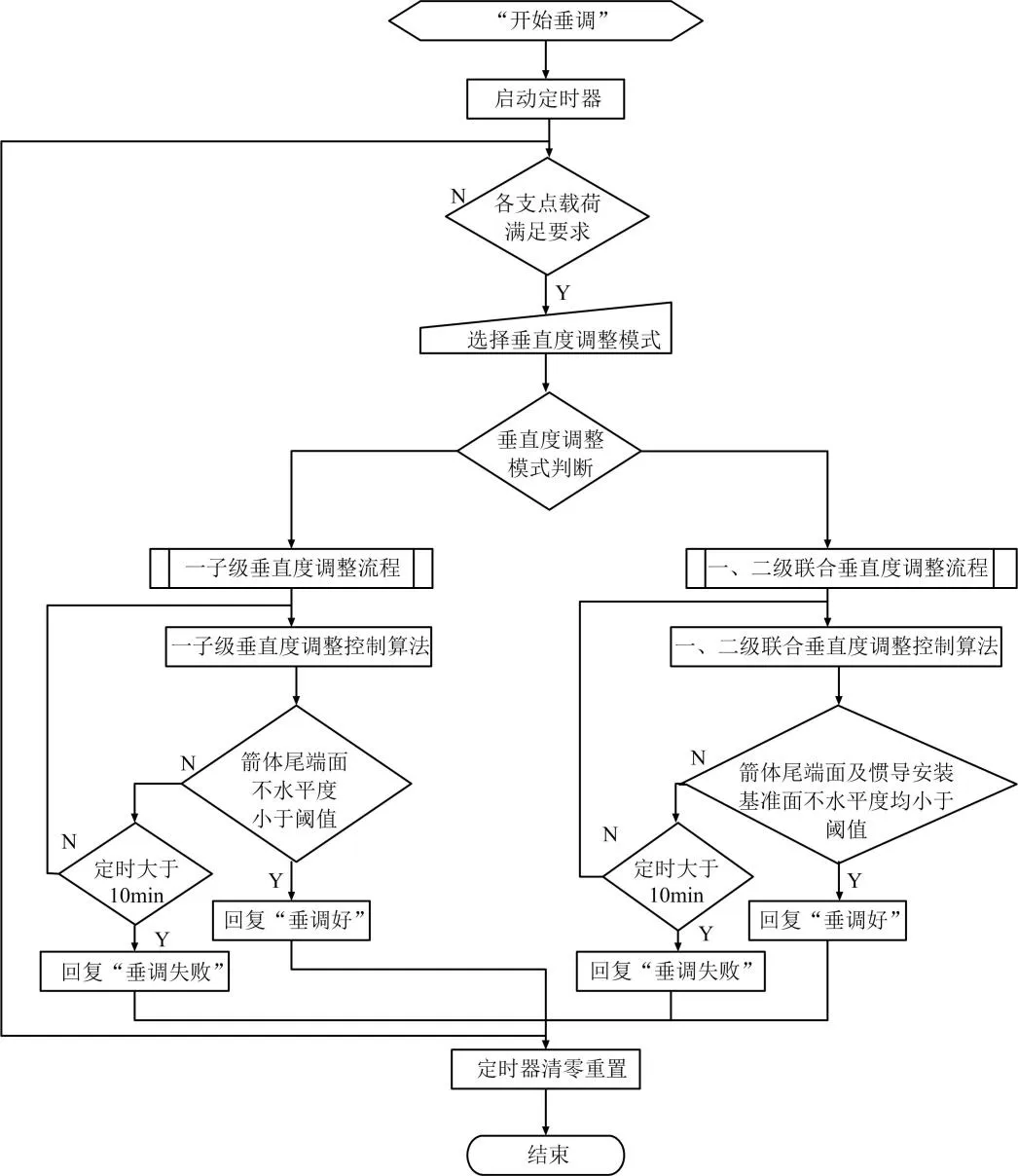
图3 垂直度调整流程Fig.3 Process of Verticality Adjustment
2.2 一子级垂直度调整控制算法
垂直度调整的运动部件为支承臂,与运载火箭尾端面支点固连在一起,即运载火箭的垂直度调整是从底部尾端面进行调整,实际加注发射过程中,箭体两侧有加注管路、电缆、摆杆等设备,垂直度调整时可能存在干涉风险,垂直度调整设置急停保护功能,同时,为防止惯性过大导致急停响应慢造成安全事故,支承臂运动速度有严格的限制。
图4为一子级垂直度调整控制原理。控制策略采用双闭环控制,外环为不水平度调节控制环,通过一子级水平度传感器测量的箭体尾端面水平度值进行负反馈,将不水平度调节至期望值内,一般取期望值的绝对值略小于不水平度阈值,以防止不水平度数值抖动导致调节频繁进行,不水平度调节环控制器通过计算得出当前时刻各支承臂的升降动作顺序,按照先Ⅰ支承臂及Ⅲ支承臂,后Ⅱ支承臂及Ⅳ支承臂的顺序进行两个方向的不水平度调节,并将当前时刻各支承臂应执行的动作输入至内环。
内环为支承臂位置环,执行支承臂的位置控制,控制对象阀件主要为比例阀(控制支承臂运动速度)、换向阀(控制支承臂运动方向)。由于存在4个支承臂驱动机构而导致过自由度调节的问题,因此在垂直度调整过程中,以Ⅰ、Ⅲ象限调节为例,需要Ⅱ、Ⅳ支承臂保持不动,Ⅰ、Ⅲ支承臂进行一升一降动作,并且升降动作的位移必须要保持一致,以使尾端面在同一平面内翻转,尽量减小箭体支点的载荷以防损坏箭体结构。综上所述,内环的位置控制与一般的位置闭环控制不同,位置环控制目标不是控制驱动机构移动至目标位置数值,而是在运动过程中保持执行动作的支承臂位移实时一致。

图4 一子级垂直度调整控制原理Fig.4 Principle of the First Stage Verticality Adjustment
以内环输入为“支承臂Ⅰ升Ⅲ降位置调节”为例进行说明,位置环的控制目标为Ⅰ、Ⅲ支承臂的位移实时地保持一致,则在不考虑支承臂运动方向的情况下,支承臂位置环的控制可以描述为Ⅰ支承臂对Ⅲ支承臂的伺服跟踪控制。因此,支承臂位置环控制器的控制算法为:Ⅱ、Ⅳ支承臂升降动作保持不变,Ⅰ支承臂升,Ⅲ支承臂降,用于Ⅲ支承臂速度控制的比例阀阀口开度不变;以Ⅲ支承臂(oy1轴正方向)位移绝对值为期望值,与Ⅰ支承臂位移进行差值计算,以此差值作为PI控制器的输入,其输出为Ⅰ支承臂比例阀阀口开度,这样就形成了内环控制器的闭环控制功能,可使Ⅰ支承臂升动作位移与Ⅲ支承臂降位移保持实时一致,直至Ⅰ升Ⅲ降动作完成。
3 仿真分析
按照图3中的垂直度自动调整控制算法进行了半实物仿真试验,其中发射平台电气系统采用实物,液压系统阀件、执行机构、支承臂使用计算机仿真模型,水平度传感器、惯性导航设备仅建立输出不水平度功能模型。忽略箭体安装误差及变形等因素,依据空间几何理论,在箭体与发射平台的尺寸已知时,可通过计算得到支承臂位移与不水平度变化的关系,因此不水平度模型的输出可由支承臂位移计算得出。
在给定不同的不水平度的情况下,分别进行一子级垂直度调整,一、二子级联合垂直度调整半实物仿真试验,其中一子级不水平度阈值指标为(0±1)′,均小于1′;二子级不水平度阈值指标为均小于10′。试验结果如表1、表2所示。
从表1、表2中可以看出,仿真试验结果与控制算法中规定一致,进行垂直度调整动作时,分别以Ⅲ、Ⅳ支承臂作为期望值,Ⅰ、Ⅱ支承臂进行伺服跟踪控制时,位移跟踪效果良好,满足垂直度调整的阈值要求。但是由于本文仅涉及到发射平台电气系统,未建立运载火箭箭体的柔性模型,因此未考虑箭体的柔性变形带来的误差等影响,在算法的实际工程应用中,必须要加以综合考虑。

表1 一子级垂直度自动调整试验结果Tab.1 Experimental Results of the First Stage Verticality Adjustment

表2 一、二子级联合垂直度自动调整试验结果Tab.2 Experimental Results of the First Stage and Second Stage Verticality Adjustment
4 结束语
本文首先介绍运载火箭发射平台垂直度调整原理,并在此基础上,针对“四点支承”方式的垂直度调整控制进行算法研究,详细阐述了控制流程和控制算法,并经过仿真分析,结果表明,本文提出的垂直度自动调整控制算法满足垂直度调整指标要求,突破了目前运载火箭型号手动垂直度调整的模式。
猜你喜欢
航天制造技术(2022年4期)2022-09-30 05:50:20
电气开关(2021年3期)2022-01-05 07:11:34
建材发展导向(2021年13期)2021-07-28 07:14:56
建材发展导向(2021年13期)2021-07-28 07:14:34
橡塑技术与装备(2021年7期)2021-04-22 15:54:38
发明与创新·中学生(2019年3期)2019-03-20 00:36:28
电线电缆(2017年5期)2017-10-18 00:52:06
航空模型(2017年3期)2017-07-28 20:56:40
太空探索(2016年12期)2016-07-18 11:13:43
石油化工建设(2015年4期)2015-12-01 04:17:07
