深空探测器自主控制技术综述
2019-10-24 01:52:02王大轶符方舟孟林智李文博李茂登葛东明
深空探测学报 2019年4期
王大轶,符方舟,孟林智,李文博,李茂登,徐 超,葛东明
(1.北京空间飞行器总体设计部,北京 100094;2.北京控制工程研究所,北京 100190)
引 言
国务院新闻办公室于2016年12月27日发表的《2016 中国的航天》白皮书中明确指出:“2020年左右,发射首颗火星探测器,实施环绕和巡视联合探测,后续实施第2次火星任务,对火星采样返回;小行星探测、木星系及行星穿越探测等的方案深化论证和关键技术攻关,适时启动工程实施,研究太阳系起源与演化、地外生命信息探寻等重大科学问题,航天探测将走向更远的深空。”我国未来深空探测任务将重点开展月球永久阴影区探测、小行星采样返回探测、火星采样返回探测、木星系及行星际穿越探测、太阳系边际探测等一系列深空探测活动。
深空探测通常指的是对月球及以远的地外天体进行空间探测的活动[1]。深空探测既是航天活动发展的必然选择,也是人类进一步了解宇宙、探索生命的起源和演化、获取更多科学认识、开发和利用空间资源的重要手段,对科技进步和人类文明的发展具有极为重要的意义[2]。深空探测任务具有探测目标远、飞行时间长、所处环境动态多变等特点,导致深空探测器的操作和控制与近地轨道卫星存在很大的区别,例如上传指令延迟大、地面测控精度差、数据传输码率低、安全自主保证难等[3]。鉴于深空探测的重要性以及困难性,学者们对深空探测的相关技术进行了大量研究[4-16]。目前,传统的“地面测控站—航天器”大回路操作控制模式大幅限制了深空探测任务的实时性、安全性和可靠性,而自主控制是解决这些问题的有效途径,已成为未来深空探测技术发展的一个重要方向。
深空探测自主控制技术指的是通过在航天器上构建一套精度高、自主性强、安全可靠的自主运行管理系统,在长时间无人参与情况下的自主安全运行。根据飞行阶段和周围环境自主开展工程任务与科学任务的调度规划、感知导航、命令执行、器上状态监测与故障时的系统重构,确保实现深空探测器的安全可靠自主运行。“自动化、自主化和智能化”是航天器技术发展的主体脉络,目前航天器的总体技术水平已基本实现了自动化。
针对深空探测任务实现“自主化”的根本需求,本文将在自主控制技术的大方向下,围绕“自主导航、自主制导与控制、自主任务规划、自主故障诊断与重构”4个方面,对深空探测器自主控制技术开展深入研究。
1 自主导航
自主导航技术指的是不与外界进行信息传输和交换、不依赖于地面设备的定位导航技术[17]。自主导航按照信息获取的方式通常可以分为3 类[18],如表1所示。目前,航天器通常依靠地面站的无线电测控进行导航,但对于深空探测器而言,由于探测目标远、通信时延大,难以实现实时测量[19]。因此,为保证深空探测器安全、准确地完成探测任务,要求其必须具有较强的自主导航能力。近年来,学者们针对探测器的自主导航技术进行了深入的研究[20-26]。深空自主导航不仅是深空探测器安全的重要保证,也是地面测控的有效补充。除此之外,在目标天体接近、绕飞、着陆、附着和撞击等特殊的飞行阶段,深空自主导航也表现出一定的超越地面测控的技术优势。接下来,将从发展现状和未来发展趋势2个角度对深空探测器的自主导航技术进行综述。
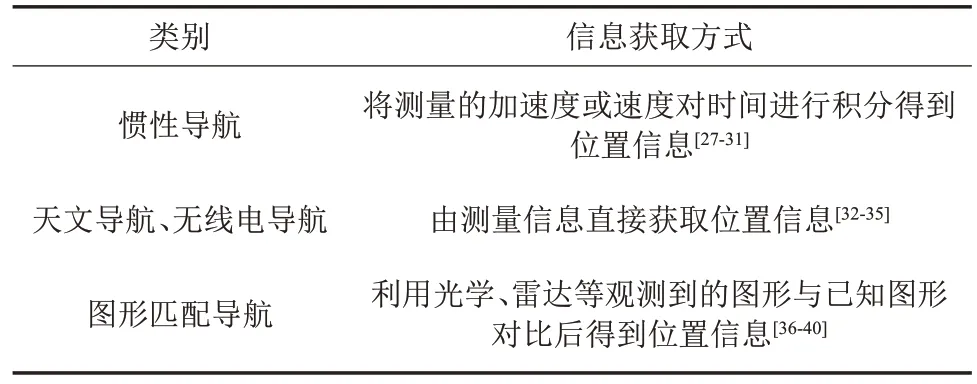
表1 自主导航技术分类Table1 Classification of autonomous navigation technology
1.1 自主导航技术发展现状
为了实现航天器的自主导航,Battin 提出了基于已知天体与遥远恒星视线之间夹角的星际航行航天器自主导航理论[41]。该理论被应用于1968年发射的“阿波罗8 号”(Apollo-8)飞船的深空探测任务。然而,由于利用该方法所获得的位置解算精度较低,该时期的自主导航主要作为地面测控的补充,用于确认轨道安全和在地面无法向探测器提供导航支持时为探测器返回地球提供支持。随着自主导航技术的不断发展,逐渐形成了基于光学成像敏感器、激光雷达、微波雷达、惯性测量单元等导航系统配置的探测器自主导航技术,并成功应用于国内外多个探测型号任务。
美国国家航空航天局(National Aeronautics and Space Administration,NASA)1971年发射的“水手9 号”(Mariner-9)火星探测器1972年利用星载光学相机完成了火星入轨阶段的导航任务;美国的“克莱门汀号”(Clementine)月球探测器在1994年利用紫外/可见光敏感器开展了地月转移段和环月段自主导航试验;NASA的“NEAR号”小行星探测器在1996年利用光学成像跟踪测量方法实现了绕飞段和降落段的自主导航;美国的“深空1号”(Deep Space-1)探测器在1998年分别利用小行星及背景恒星图像、目标天体图像实现了巡航阶段、接近及飞越小行星段的自主导航技术的飞行验证;日本的“隼鸟1 号”(Hayabusa-1)探测器在2003年利用光学导航敏感器、激光测距仪和雷达测距仪实现了交会、附着段的自主导航;欧洲航天局(European Space Aency,ESA)在2003年发射的“智能1 号”(Smart-1)完成了在转移轨道段和接近轨道段的自主导航试验;NASA 的“深度撞击号”(Deep Impact)探测器在2005年利用成像敏感器实现了接近和撞击段的自主导航;NASA的“火星科学实验室号”(Mars Science Laboratory,MSL)探测器在2011年利用成像敏感器实现了着陆过程的自主导航。近年来,我国在自主导航技术的研究与应用上也取得了一系列显著的成果。“嫦娥3 号”(Chang’E-3)月球探测器在2013年利用光学图像首次实现了着陆过程的自主障碍识别与避障[42]。2019年1月3日,“嫦娥 4 号”(Chang’E-4)(如图1所示)月球探测器成功着陆在月球背面,首次基于序列图像实现了月球背面崎岖、未知地形环境下的高精度自主避障软着陆。
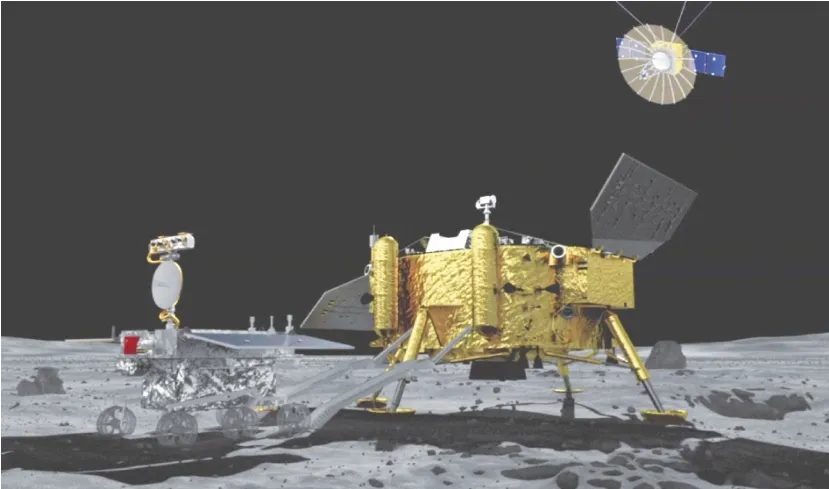
图1 “嫦娥4号”月球探测器Fig.1 Chang’E-4 Lunar probe
相比于“嫦娥3 号”着陆的月球正面虹湾地区,月球背面地形地貌以高地为主,几乎没有大片的月海,遍布撞击坑和环形山,地形较为崎岖。复杂的地形条件对着陆过程的导航、制导与控制都带来了更大的挑战[43]。在敏感器配置方面,“嫦娥4 号”和“嫦娥3号”着陆导航均配置了测距仪对惯性导航状态进行修正。针对崎岖地形可能带来的敏感器数据异常问题,“嫦娥4 号”采用了基于多测速敏感器和惯性敏感器的导航方法。其中,惯性敏感器用于着陆过程的惯性自主导航,而测距测速敏感器通过源信息融合的多波束测距测速修正融合方法,建立了智能自主导航容错计算框架,从而实现了异常测量数据的快速筛选与隔离、多波束测量信息的鲁棒融合,显著地提高了着陆导航的可靠性。
1.2 自主导航技术的发展趋势
由自主导航技术的发展历程可知,随着光学、微电子、计算机以及图像处理等领域相关技术的发展,深空探测器的自主导航技术已经取得了巨大突破。目前多数深空探测器已经具备部分的自主导航功能。随着自主导航技术的不断发展,探测器的自主导航功能也逐渐完善并朝着系统级自主导航的方向发展,从而获得更广泛的应用。
根据《2016 中国的航天》白皮书,后续深空探测任务将探测一些人类目前认知极其有限的目标天体,主要面临的难题是目标天体的先验知识缺失或者不完备,如引力模型、大气环境、表面地形等任务设计所必需的要素。同时,“定点着陆、采样返回”等科学探测任务需求对自主导航的功能性能要求也越来越高。如何解决未知环境下高精度控制的难题,是自主导航技术需深入研究的方向。除此之外,主流的自主导航技术主要利用由光学导航敏感器获取的导航星或目标天体图像信息。因此,对光学导航系统获取的图像信息进行自主图像识别、目标辨识已成为当前深空自主导航的核心内容。在后续的研究中还需要继续重点开展基于光学成像导航敏感器适应深空物性未知环境的深空探测器自主导航技术研究以及多源信息融合的自主导航技术研究,主要包括:①多维、多尺度天体表面图像稀疏表征方法;②导航图像特征提取与匹配方法;③基于惯性和序列图像的融合自主导航方法;④多源异构通用化自主导航架构设计;⑤导航敏感器自主快速配置;⑥异步时延数据融合;⑦故障后滤波重构技术。
2 自主制导与控制
自主制导与控制要求深空探测器不依赖地面、仅靠自身携带的测量设备和计算机实现姿态测量、轨道测量、确定或生成探测器在控制力作用下,飞行规律自主进行姿态控制和轨道控制[44]。深空探测器与地面测控站通信延迟大且信号有可能会被太阳及其他天体遮挡,不利于突发事件的及时处理。因此,深空探测自主制导与控制是解决突发事件、保证深空探测器安全的重要手段,引起了学者们的广泛关注[45-53]。崔祜涛等[54]为了使探测器垂直下降且着陆时水平与垂直速度为零,通过规划满足约束的高度与速度的理想轨迹并设计相应的鲁棒滑模变结构控制器,提出了一种可用于小行星表面垂直着陆的自主软着陆的制导方案;张晓文等[55]提出了一种脉冲控制与线性制导相结合的自主中途修正方法。在实际飞行轨道与标称推导存在小偏差且不考虑执行误差和导航误差的前提下,该方法仅通过一次修正即可完成制导目标。即使考虑执行误差和导航误差,该方法依旧适用。已有的相关技术发展已经在多篇论文中被综述[56-58]。以下,将从型号应用的角度对深空探测器的自主制导与控制技术的发展现状以及未来的发展趋势进行综述。
2.1 自主制导与控制技术的发展现状
19世纪90年代,俄罗斯的侦察卫星实现了燃料与翻板振动的自适应控制。1998年日本的ETS-VII技术试验卫星圆满完成了国际上第1 次全自主交会对接。同年,美国发射的“深空1号”探测器采用了远程主体的设计理念,实现了自主拍照序列规划、图像处理和分析、轨道确定、星历修正、轨道修正和姿态机动,使得该探测器在自主控制方面达到当时全新的水平。NASA 在2000年发射的“地球观测1 号”(Earth Observing-1)卫星实现了对卫星自主控制技术的试验。2004年,欧洲航天局(European Space Agency,ESA)发射的“罗塞塔号”(Rosetta)彗星探测器首次实现了彗星表面的自主着陆和自主数据采集与分析。美国在2007年的“轨道快车”飞行演示中采用自主制导与控制技术完成了自主交会对接。我国发射的“嫦娥1号”(Chang’E-1)卫星实现了自主三体指向控制。除此之外,ESA 发射的“斯波特”(SPOT)系列卫星以及ESA 发射的“星上自主项目”(PRoject for On-Board Autonomy,PROBA)系列卫星等也都对自主控制技术有着不同程度的应用。2011年,美国发射的“好奇号”(Curiosity)火星探测器首次在大气进入段采用了大气制导技术,在动力下降段采用了“空中吊车”的着陆方案。该探测器代表了火星探测技术的最高水平[59]。2013年,我国发射的“嫦娥3 号”探测器利用自适应动力显式制导、无迭代多项式粗避障制导以及内外环结合的精避障制导等方法,实现了探测器的软着陆自主制导[60],其自主避障的制导、导航与控制(Guidance,Navigation and Control,GNC)系统软硬件构成如图2所示[61]。2018年,我国发射的“嫦娥4号”探测器通过自主避障实现了在月球背面南极-艾特肯盆地(South Pole Aitken,SPA)的冯·卡门(Von Kármán)撞击坑的成功着陆[62],具体的动力下降过程如图3所示。其中,“嫦娥4号”探测器系统由着陆器、“玉兔2号”巡视器和“鹊桥号”中继星组成[63],不同部分的构型如图4所示。

图2 具有自主避障功能的GNC系统软硬件构成Fig.2 Software and hardware composition of GNC system with autonomous obstacle avoidance function
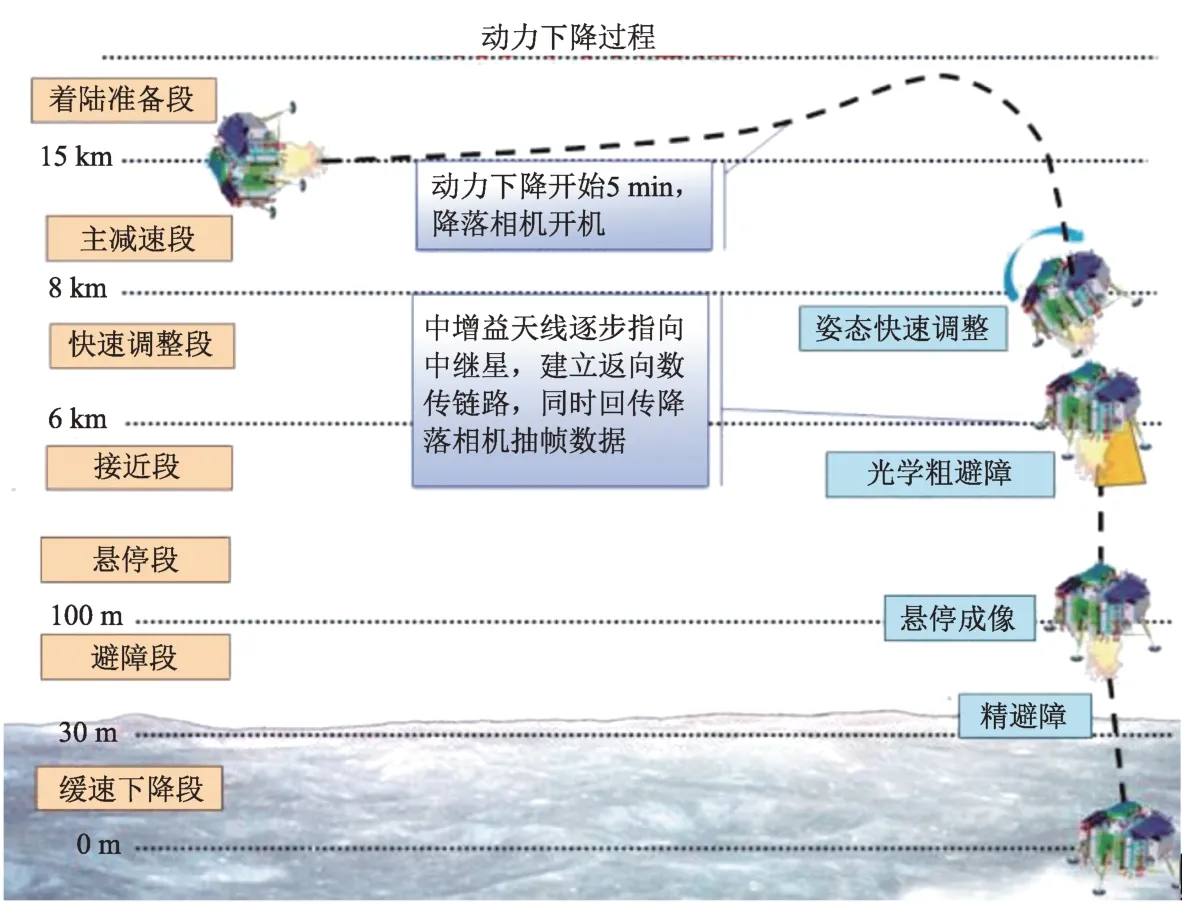
图3 “嫦娥4号”动力下降过程[43]Fig.3 The dynamic decline process of Chang’E-4 probe[43]
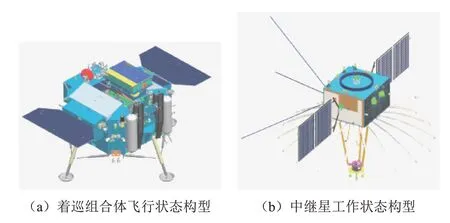
图4 “嫦娥4号”探测器系统Fig.4 Explorer system of the Chang’E-4
针对崎岖地形带来的导航高度急剧变化所导致的制导控制状态不稳定问题以及崎岖地形带来的精确避障需求,“嫦娥4 号”采用了一种将垂直接近和精确避障相结合的控制方法,实现了月球背面崎岖地形的精确避障和安全着陆。值得一提的是,在“嫦娥4号”探测器的动力下降过程中,动力下降的初始条件由地面确定和注入,而之后的制导、导航、控制、通信、图像获取与传输等动作全部由着陆器自主完成。
2.2 自主制导与控制技术的发展趋势
目前深空探测器制导系统设计主要考虑质心运动,忽略了航天器本身的姿态运动。另外,控制系统设计主要考虑姿态指令,尚没有系统地考虑制导与控制之间的相互耦合关系。除此之外,后续深空任务应用场景中(如木星探测大气进入过程),姿轨控的强耦合性更大,产生的制导指令易超过控制系统的机动范围。因此,针对更为遥远、复杂的深空探测任务需求,需进一步提升制导与控制方法的自主性和鲁棒性。在后续的研究中还需要重点开展多约束条件下制导与控制一体化设计方法的研究,主要包括:①姿轨强耦合情况下的一体化建模和分析方法;②多约束条件下的轨迹在线生成方法;③大不确定性、多约束条件下的非线性制导与控制方法;④输入受限情况下的制导与控制方法;⑤执行机构故障情况下制导控制一体化容错设计方法等。
3 自主任务规划
由于航天飞行任务过程复杂、测控资源紧张且对可靠性和安全性要求高,任务规划的合理性是航天任务能否圆满完成的重要影响因素[64]。特别地,深空探测任务的特殊性对深空探测器的任务规划提出了更高的要求。深空探测器自主任务规划技术指的是根据深空探测器本身的能力和状态、对空间环境的感知和认识以及一定时间内的任务目标,通过利用计算机知识建模等技术对可选择的动作和涉及的资源约束进行推理并自动生成一组时间上有序的活动序列的技术[65]。目前航天器任务规划主要是由地面工作人员根据用户具体需求和各种约束条件,制定出合理的飞行控制计划和指令进行上传来完成。因此,随着深空探测任务的多样化和复杂化,减轻对地面测控站的依赖,更高效地完成科学探测,实现在无人干预情况下的自主任务规划是自主技术发展的必然趋势。下面将通过对深空探测器的自主任务规划技术的发展现状进行综述,提炼目前存在的技术问题,并基于此给出该技术未来可能的发展方向。
3.1 自主任务规划技术的发展现状
探测器系统是一个同时受到时间和资源等多种约束影响的复杂系统。探测器系统同时拥有规划问题的和调度问题的特点,包括调度问题中的时间约束和规划问题中的活动选择。因此,传统的规划调度技术不适用于空间技术领域。相反的,现代的规划调度技术则为该问题的求解提供了新的方案。总的来说,探测器控制操作技术主要经历了遥控、半自主控制和自主控制3个发展阶段。其中,自主控制是近几年提出的一种新的控制方式,该技术的具体应用可以追溯到20世纪90年代。受当时技术发展水平的限制,只有某些子系统具备自主性。NASA 在1996年发射的“NEAR 号”探测器可以在器上计算太阳、地球、小行星以及探测器的位置,从而根据科学任务和下传数据的操作要求自主调整姿态。除此之外,该探测器可以自主应对故障以保护探测器的安全。1997年,美国发射的“卡西尼号”(Cassini)土星探测器的器载计算机能够自主完成12 个载荷仪器的控制、探测器的姿态定向、热环境的控制以及数据的存储和通信。可以看出,非完全自主技术充分利用了上下行的带宽,该技术的应用在一定程度上实现了任务操作的实时性。全局自主首次由NASA 提出并在“深空1 号”探测器飞行中得到成功验证。其中,完成自主功能的软件系统称为远程智能体。远程智能体由规划调度模块、智能执行模块、控制检测模块和故障诊断模块组成,可以在没有地面站干预的情况下自主完成规划并监测探测器的健康状况,完成故障的识别、隔离和故障后的恢复任务。该技术的应用解决了深空探测器所面临的资源受限和上传指令延迟大等问题,大大增加了可靠性和交互性。远程智能体的架构如图5所示。
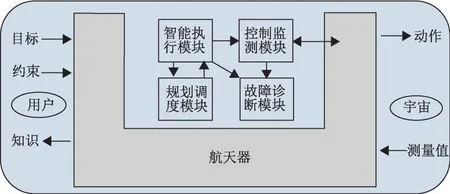
图5 远程智能体的架构[72]Fig.5 Remote agent architecture[72]
目前,已开发的许多规划调度系统都已经在航天器中得到了成功的应用。美国喷气推进实验室(Jet Propulsion Laboratory,JPL)采用经典规划调度算法开发的自主规划与调度环境(Automated Scheduling and Planning Environment,ASPEN)实现了任务与规划调度系统的模块化,并在“地球观测1 号”(Earth Observer One)卫星上得到了成功的应用[66];美国Colorado Space Grant 学院提出了基于贪婪算法的在轨卫星最大化任务数量下的任务规划调度方法,开发了DATA-CHASER(Distribution and Automation Technology Advancement-Colorado Hitchhiker and Student Experiment of Solar Radiation)自动规划/调度系统(DCAPS,Automated Planner/Scheduler),并成功应用于STS-85 航天飞机[67];美国NASA根据启发式搜索方法开发了航天器任务规划调度系统(Extensible Unification Remote Operation Planning Framework,EUROPA),并应用于“深空1号”探测器、“勇气号”(Spirit)、“机遇号”(Opportunity)火星车等多个型号[68-71]深空探测任务中。在我国“嫦娥4号”任务中,探测器在动力下降段需要在仅约700 s时间内把距离月面的高度从15 km 减少到0 m,速度从1.7 km/s 减到0 m/s,姿态从90°减到0°,这是一个轨道、姿态密切耦合的高动态变化过程。探测器经过精细设计,实现了该子任务的自主完成。同时,为确保着陆过程不同姿态下中继链路的可用性和着陆后的整器安全,结合飞行轨迹与姿态,对动力下降过程对中继星测控数传链路自主模式切换的策略进行设计,实现了子任务级的自主规划实施。
3.2 自主任务规划技术的发展趋势
深空探测任务中的一些特殊情况给传统的自主任务规划技术提出了新的挑战,如复杂的资源约束和时间约束、活动之间并发性约束、探测环境不确性等问题。在进行自主任务规划时,不仅需要考虑活动的选择和排序,同时还需要对资源、时间等因素进行分配和优化,这与传统的规划与调度技术有很大区别,需要设计新的知识表示方法和规划方法。因此,在未来的研究中,需以后续的小行星、木星系探测任务为背景,从系统层面的需求出发,研究灵活、有效的自主任务规划方法,主要包括:①建立一种准确又完整的规划知识描述方法,方便各种知识的统一描述,缩小问题空间,提高规划效率;②在由不同子系统特性集中形成的多维规划知识空间内,利用星上有限的计算资源,研究高效的知识搜索和推理方法,实现快速、正确的任务规划;③考虑因果关系和活动之间的多种约束条件,研究约束处理方法和定量定性信息处理方法。
4 自主故障诊断与重构
自主故障与重构指的是探测器不依赖地面,仅靠自身携带的测量设备和计算机,自主地实现故障检测、故障隔离、故障辨识,并根据诊断结果,通过改变空间构型或控制算法等发生故障,恢复全部或部分既定功能。为实现航天器的自主运行,需要大幅提高航天器控制系统的安全性。在以往的研究中,大多是通过提高零部件可靠性以及提高系统的故障诊断和处理能力2 种方式来提高航天器控制系统安全性。然而,前者受加工、制造和装配等客观因素影响,提升零部件的能力有限,且提高零部件可靠性只能降低故障概率,高可靠性不代表不会出现故障[73]。同时,由于航天器独特的运行条件,大多数航天器发生故障后通常不可维修。因此,应在保证足够可靠性的基础上,着重提高航天器控制系统的故障诊断和处理能力。
目前大多数航天器都采用天地大回路的方式处理故障,即航天器诊断系统检测到异常后,将数据传输给地面站,通过地面站人工判读的方法对故障进行诊断和分析后,再将所得结果传回航天器,指导航天器完成故障处理[74]。然而,传统的地面站专家会诊的故障应对方法无法满足航天器自主运行的要求。为保证航天器安全可靠自主运行,必须实现航天器控制系统的自主诊断重构。下节对国内外深空探测器的自主故障诊断与重构技术的发展现状进行综述,并给出该领域未来的发展趋势。
4.1 自主故障诊断与重构技术的发展现状
随着航天技术的不断发展,航天器的功能和结构变得越来越复杂,这要求地面站观测数量急剧增加的遥测数据[75];另一方面,依靠地面站协助的航天器的传统运行方式已经无法满足与空间站距离远、信息传递时延大、运行环境复杂的深空探测,连续提供稳定服务的通讯导航以及发生战争时不依赖于地面自主生存的军事应用等新的任务要求[76]。因此,随着航天飞行任务扩展、可靠性提高及工作寿命延长等要求的提出,自主故障诊断与重构技术吸引了大多数专家学者们的关注。从20世纪50—70年代,航天器的故障诊断与重构主要利用地面遥测数据完成,即将器上遥测数据发送至地面站,由地面站进行监测并诊断故障后,通过航天器设计硬件的冗余切换对故障进行简单处理。该类基于地面遥测数据的故障诊断与重构技术被成功应用于美国的第1 艘载人宇宙飞船“水星号”(Mercury)和苏联的第1 艘载人宇宙飞船“东方号”(Vostok)。实际上,由于没有在系统设计阶段考虑故障的诊断与重构,仅通过运行时的遥测数据难以完成故障的精确定位,导致只能通过整机切换的方式实现故障的诊断与重构,这对探测器的运载能力提出了极大的要求。
从20世纪70—90年代,第2 代航天器系统的故障诊断和重构技术,特别是基于硬件冗余的故障诊断容错技术得到了很大发展。其中,美国的“陆地遥感”(Landsat)系列卫星、法国的“斯波特”(SPOT)系列卫星、日本的“地球资源卫星1 号”(JERS-1)等都具备了不同程度的故障诊断能力和重构能力。我国航天器的自主故障诊断与重构技术的研究起步相对较晚。在20世纪发射的“资源1 号”卫星配置了具有智能接口的部件和模块级备份计算机,成为我国第一颗具有一定自主故障诊断与重构能力的卫星。从20世纪90年代—21世纪初,基于解析冗余的自主故障诊断与容错技术被广泛应用于包括美国的“阿波罗”(Apollo)载人飞船和俄罗斯的“联盟号”(Soyuz)飞船的第3 代航天器系统的自主故障诊断与重构。该时期的航天器关键部件有多重冗余,满足航天器对系统的安全性、可靠性要求,可以做到“一重故障保工作,双重故障保安全”。同一时期我国研制的遥感卫星、气象卫星、通信卫星以及各类小卫星的系统也都具备了不同程度的故障诊断与重构能力。
从21世纪初开始,航天器从原本单一配置于各分系统(如控制分系统、电源分系统、推进分系统等)的故障诊断系统诊断故障的方式,向系统级状态监测、故障预测和故障修复的方式发展,逐步形成了航天器集成健康管理系统,从保障任务完成的系统顶层实现对航天器的故障综合检测与重构。到目前为止,门限值检验法、推断检验法、一致性检验法等实用的故障诊断方法,以及备份部件切换、系统切换、敏感器和执行机构重构等冗余控制方法都在我国已发射或在研型号中得到应用。其中,针对月球背面软着陆任务的特点,要求“嫦娥4号”探测器必须具备极强的自主能力。
因此,对于故障的诊断与处理也提出了更高要求,将原本依赖地面的基于人工判断处理的方式改变为交由器上自主进行诊断与执行。在部件级层面,重点针对推进发动机、陀螺、加速度计、测距敏感器、测速敏感器等关键部件,设计了自主故障诊断与处理算法;在系统级层面,重点针对导航、姿控等关键分系统,设计了自主故障定位与重构策略,极大提升了航天器系统故障的自主能力。
4.2 自主故障诊断与重构技术的发展趋势
后续火星等深空探测任务存在距离远、延时大、信息交互难、不确定性强等技术难点,使得现有方法难以满足故障诊断重构所需的时效性、安全性和可靠性。因此,如何进一步提升探测器故障诊断的识别精度和快速性,同时在保证故障后功能不变的情况下降低重构能耗,是亟需深化研究的具体问题。
系统可诊断性和可重构性是表征控制系统故障诊断、处理能力的本质属性,揭示了故障诊断和系统重构深层次的内涵。通过对系统进行可诊断性可重构性评价与设计,可以将诊断与重构的工作重心前移至设计阶段,从根本上提高系统的故障诊断与重构能力,基本思路如图6所示。目前关于系统可诊断性评价与设计已经取得了一定的成果[77-81]。在未来的研究中,需对目前关于控制系统的可诊断性与可重构性成果进行进一步研究,从而推广应用于深空探测器系统,实现整器自主诊断重构能力的可表征、可判定及可量化,主要包括:①针对多因素耦合作用下系统诊断能力的精准度量与综合优化等难题,研究基于解析冗余关系与相似度的可诊断性评价;②系统配置与诊断方法一体化设计等方法;③针对多因素约束下系统重构能力的精细评价与强化实现等难题,研究面向多目标的可重构性评价;④执行器配置与重构策略协同设计等方法。
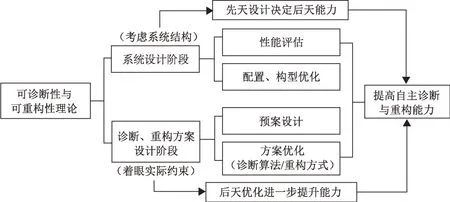
图6 基于可诊断性可重构性理论提高系统的故障诊断与重构能力的基本思路Fig.6 Basic ideas for improving the fault diagnosis and reconfiguration capability of system based on diagnosability and reconfigurability theory
5 结束语
本文从自主导航、自主制导与控制、自主任务规划以及自主故障诊断与重构4个方面对深空探测器自主控制技术进行了深入研究。通过对相应技术的研究现状进行综述,提炼出了这4个关键技术目前在理论研究与实际应用方面存在的问题。基于此,结合未来实际任务需求,给出了深空探测器自主控制技术未来的发展方向。
随着深空探测器自主控制技术不断发展以及月球永久阴影区探测、小行星采样返回探测、火星采样返回探测、木星系及行星际穿越探测、太阳系边际探测等一系列深空探测活动的实施,将极大地开拓我国深空探测的深度和广度,获取重大原创性科学发现,促进我国航天技术跨越式提升,有力推动空间科学、空间技术和空间应用全面发展。
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
小学科学(2019年12期)2019-01-06 03:38:45
国际太空(2018年9期)2018-10-18 08:51:32
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09