智能网联汽车车载以太网技术应用研究
2019-10-24 06:46尹荣彬陈博孔祥明
汽车文摘 2019年11期
尹荣彬 陈博 孔祥明
(中国第一汽车股份有限公司 智能网联开发院,长春 130013)
主题词:智能网联 汽车总线技术 车载以太网
缩略语
ADAS Advanced Driver Assistance Systems
OTA Over the Air Transmission
V2X Vehicle to Everything
CAN Controller Area Network
CANFD CAN With Flexible Data-rate
LIN Local Interconnect Network
MOST Media Oriented System Transport
OSI Open Systems Interconnection
AVB Audio Video Bridge
TSN Time Sensitive Networking
ECU Electronic Control Unit
SD Service Discovery
PDU Protocol Data Unit
UDS Unified Diagnostic Services
UDP User Datagram Protocol
UDPNM UDP Network Management
RTP Real-time Transport Protocol
SAP Service Access Point
API Application Program Interface
VLAN Virtual Local Area Network
MAC Media Access Control address
IPv6 Internet Protocol Version 6
IPv4 Internet Protocol Version 4
ICMP Internet Control Message Protocol
ARP Address Resolution Protocol
NDP Neighbor Discovery Protocol
TCP Transmission Control Protocol
SSL Secure Sockets Layer
DHCP Dynamic Host Configuration Protocol
SOME/IP Scalable service-Oriented Middleware over IP
DOIP Diagnostic communication over Internet Protocol
T-BOX Telematics BOX
BCM Body control Module
IVI In-Vehicle Infotainment
AP Access Point
STA Station
OBD On Board Diagnosis
OS Operation System
1 前言
随着汽车的智能化、网联化浪潮的来临,伴随着车辆与智能手机、云和大数据的不断运用,特别是高级驾驶辅助系统(ADAS)技术的不断革新、高品质车载娱乐影音的普及,以及OTA远程升级、V2X、信息安全等技术的发展,推进了车载网络数据传输容量需求的爆发式增长。以上需求已经超出了CAN、CANFD等传统网络的承载能力,这也促进了车载以太网技术的快速发展和应用。
目前主流的汽车总线技术主要有CAN、LIN、FlexRay、MOSTt、CANFD等。这些网络标准基本上都是面向汽车行业制定。CAN总线是目前应用最为广泛的车载总线技术,CAN总线最大传输速率为1 Mb/s,但与以太网相比,CAN不仅速度慢很多,而且效率也低。因为CAN的最大净荷只有8字节,所以CAN帧的开销很高:帧头和帧尾比数据字段还大[1]。LIN总线是一种低成本通用串行总线技术,在汽车领域主要用于开关、车门、座椅等控制器,最大传输速率为20 kbit/s[2],传输速率低。FlexRay是一种新型汽车总线技术,属于共享式总线技术,带宽可达10 Mbit/s[3],与以太网相比FlexRay的速度远低于以太网的速度,不适合信息娱乐应用。因此与车载以太网相比用途更少。MOST总线技术用于满足信息娱乐应用的特殊需求,支持多媒体流数据的传输,最大带宽可达150 Mbit/s。与以太网类似,MOST总线的各条链路在物理层相互独立,但二者之间有一个重要的区别:MOST总线的环形结构只支持单向通信[4]。
车载以太网是一种用以太网连接车内电子单元的新型局域网总线技术。车载以太网在单对非屏蔽双绞线上可实现100 Mbit/s甚至1 GMbit/s的传输速率[5],可使电缆重量减轻30%、降低连接成本可达80%。同时还满足汽车行业对高可靠性、低电磁辐射、低功耗、带宽分配、低延迟以及同步实时性等方面的要求。车载以太网不仅具备了适应ADAS、影音娱乐、汽车网联化等所需要的带宽,而且还具备了支持未来更高性能的潜力(如自动驾驶时代所需要的更大数据传输)。专家预测,到2020年,汽车中部署的以太网端口将达5亿个。
2 开放系统互联(OSI)参考模型
车载以太网基于ISO/IEC 7498 6.1.2中规定的开放系统互联(OSI)基本参考模型,该模型将通信系统结构划分为7层。自上而下分别为应用层(层7)、表示层、会话层、传输层、网络层、数据链路层和物理层(层1)[6]。但车载以太网一般被认为是5层协议,图1显示了基于所需的功能在以太网ECU中实现的协议及其在OSI标准中的位置。

图1 OSI标准中汽车以太网协议构架
每个层的目的是为上层提供服务。每个层的活动部分用软件、硬件或软硬件组合实现,称为实体。在OSI模型中,在不同节点的同一层实体之间进行通信。相同层之间的通信实体称为对等实体。由一层提供的服务在该层的服务接入点(SAP)处可用。上面的层可以通过交换数据参数来使用它们。OSI参考模型分层对比见表1。
物理层主要负责拓扑和物理网络设计,线缆、连接器、收发器、网络接口卡和其它硬件设备的运行细节包括将数据位与可传输的信号之间进行相互转换。
数据链路层主要负责逻辑链路控制、媒体接入控制硬件寻址、差错检测和处理、底层报文组帧、服务质量功能以及定义物理层标准。
网络层负责将多个网络连接到一起,形成互联网络,进行互联网络间寻址、路由、数据报封装、分片和重组以及某些类型的差错处理和诊断功能。
传输层代表着高层与低层之间的过渡,其下是主要基于硬件、面向数据传递的低层,其上是更为抽象、面向软件应用和功能的高层。
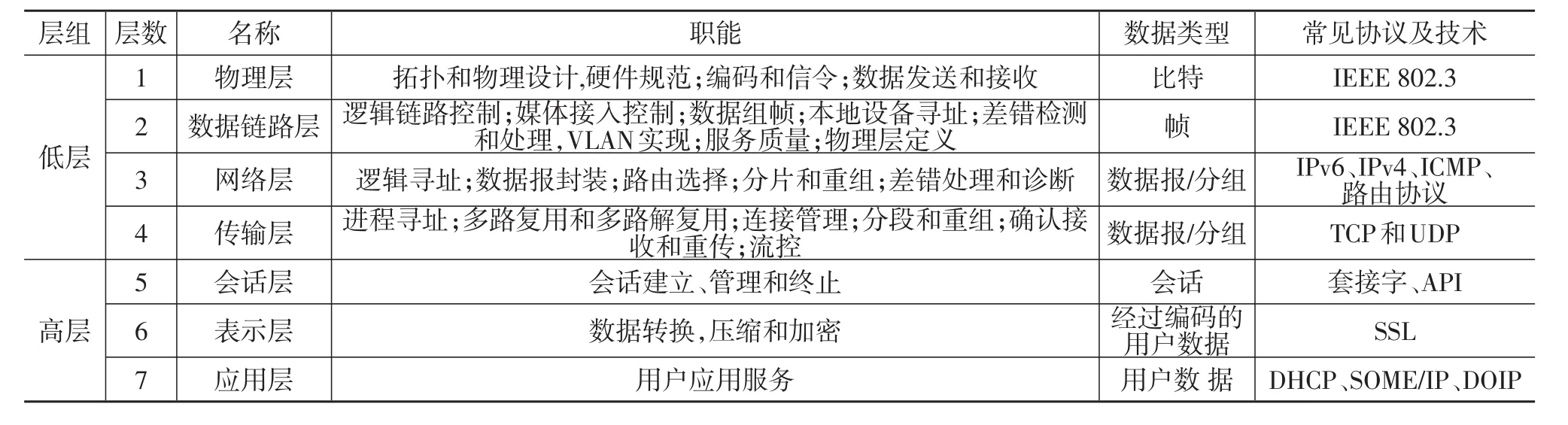
表1 OSI参考模型分层对比[7]
会话层用于建立和管理软件进程间的会话。有些会话层技术包括名为应用程序接口(API)的软件工具集。表示层通过操作任务如转换、压缩和加密等将数据从一种表示转换为另一种表示。应用层定义了应用协议,实现用户应用和其它高层功能。应用层处于协议栈的最顶端,它使用下方各层提供的服务,而不向任何层提供服务。
3 车载以太网在产品车型上的应用
一汽(FAW)红旗产品某车型是国内首次创新应用车载以太网技术架构的车型,该构架是面向服务的、基于以太网为骨干网络,集信息域、互联域、自动驾驶域的多域融合的FAW新一代整车网络架构,该架构具备支持拓展L2+级自动驾驶和整车级OTA技术的能力,具有高功能安全、高信息安全的技术优势。
3.1 功能定义
本车型以太网部分主要实现安全防护、车况查询、远程控制、手机泊车、移动网络、WiFi功能、定位导航、信息推送等方面功能。
安全防护主要是在车外需要访问车内时,需要首先由T-BOX控制器和BCM控制器进行身份认证,通过后才可以进行通信,并且在通信过程中为了保证通信数据的完整性、可追溯性和机密性,防止重放攻击,需要在通信数据上增加消息校验码和新鲜值。
车况查询为通过手机客户端后,对剩余燃油、总里程、长时平均油耗、蓄电池电量、4门天窗4个车窗的开关状态、4门行李箱前机舱盖的锁止状态、车灯(近光、位置、远光)开关状态、胎压值等车辆状态进行查询。
远程车辆控制系统包含的对象实体有目标车辆、手机APP、后台(含数据中心、门户运营等)及通信运营商。由T-BOX控制器将接收到的后台命令转换为以太网报文,发送给网关控制,再由网关控制器进行以太网报文转CAN报文的路由发送到车内进行相应的控制,再由网关将各控制的执行反馈由CAN总线路由的以太网发给T-BOX,完成整个闭环的控制。控制类别主要有远程启动、远程解闭锁、远程寻车、远程车窗、天窗、车灯控制、远程空调控制等。
移动网络是指T-BOX搭载了移动通信模块,可以提供语音通话、分组数据上网的功能。但T-BOX不具备显示和操作的功能,所以需要IVI进行显示和操作移动网络。T-BOX具有共享移动通信网络的功能,供车内其它单元数据上网使用。IVI和T-BOX间的移动网络功能主要涉及网络信息显示、语音电话控制、分组数据转发。
WiFi功能是指T-BOX搭载的WiFi模块,具备分享热点和连接其它热点的功能。IVI可以通过远程指令控制T-BOX的工作模式,包括关闭、AP(无线接入点)、STA(站点客户端),也可以通过远程命令查询TBOX的当前模式。
定位导航功能是指T-BOX搭载导航定位模块,可以通过网络将定位信息发送至车内其它单元使用。T-BOX采用固定周期远程通知方式将定位信息发送车内,定位信息内容包括时间年、月、日、时、分、秒、定位状态、经度状态、经度、纬度状态、纬度、高程、航向。
3.2 方案设计
对于3.1章节所描述的功能需求,在之前项目设计时多采用CAN总线进行传输相关报文,传输效率低,安全性差,本车型项目首次采用以太网传输车内信息到车外,由网关控制器与T-BOX控制器进行端对端通信,提高了通信带宽,同时在网关内部通过防火墙设计和安全通信算法,提高了通信的可靠性。
在本项目设计过程中将这些使用以太网传输的报文实现方式划分为两类,一类是车内控制器与车外信息进行交互的内容,主要对应安全防护、车况查询、远程控制、手机泊车等功能,设计为使用UDP报文路由的方式,其优点为响应及时,数据传递快,可以满足远程控制、手机泊车等对时延要求较高的应用;另一类主要是基于服务的设计,主要功能为移动网络、WiFi功能、定位导航、信息推送,这些功能有明确的服务主体和交互流程,应对周期型报文、事件型报文、周期+分配方式的设计方式、以及订阅机制在不同领域中的应用,以实际的应用功能,详细对每种工况做出分解,形成SOME/IP协议。
3.3 设计实现
3.3.1 车型以太网节点拓扑结构设计
在本车型项目中,以太网节点主要有网关控制器、T-BOX控制器、IVI控制器、OBD控制器、BCM1控制器(图2)。其中网关主要实现Switch功能、路由功能;T-BOX和IVI实现互联功能;OBD、BCM1主要实现DOIP功能。

图2 车型节点拓扑
3.3.2 路由策略设计
从CAN到以太网的路由,考虑到传输效率,网关将接收到的多路CAN总线的信息,打包到一个UDP报文中进行发送,由于一个UDP中包含多个PDU(数据单元),每个数据单元对应一个CAN报文,为保证接收方在解析时能对应到相应的CAN报文内容,将以太网路由的UDP报文数据部分设计为如图3。

图3 以太网路由UDP报文PDU数据结构
每一个PDU都有一个数据头和数据载荷组织,数据头占8字节,由4字节的ID和4字节的长度组成,ID用于标识后面的数据载荷对应的CAN报文内容,按照如上设计,一帧由多个CAN报文转为以太网的UDP报文包格式为图4。
在路由机制设计上,网关内部控制一个10 ms的定时器,当在CAN总线上接收到第一帧需要路由到以太网的CAN报文时,启动该定时器,并将所接收到的所有CAN报文写入到缓冲区中,当定时器超时后,将缓冲区中所有的数据打包到一个UDP报文中发送出去。同时,根据CAN报文的优先级,将优先级高的报文设置为立即发送,只要接收到该CAN报文,不等定时器超时,立刻将缓冲区内的数据发送出去。路由机制如图5。

图4 以太网路由UDP报文结构示例

图5 以太网路由UDP报文发送机制示例
3.4 车载以太网仿真结果
针对本项目设计,使用Symtavision软件对网关控制器、T-BOX控制器、IVI控制器之间的报文传输进行仿真,以太网仿真拓扑结构见图6。

图6 以太网仿真拓扑
3.4.1 响应时间
响应时间用于分析每个以太网报文在发送方从激活后,再经Switch进行转发,到接收方接收后的传输时间,表示了报文在整个传输链路的时延。图7显示了以太网消息的响应时间,该响应时间按最大值按降序排序,并且还显示了所有显示的消息的平均值。最大响应时间为0.174 ms,仿真结果在合理范围。
3.4.2 端口的最差情况缓存
以太网的端口的最差情况缓存用于分析以太网端口所使用缓冲的大小,用于指导和验证硬件设计的合理性。图8显示了所有以太网端口的端口缓冲的最差情况。所显示的值非常低,最大为4 289 bit,缓冲区设计要求为4 K完全符合。

图7 响应时间仿真结果

图8 缓冲区填充水平仿真结果
3.4.3 以太网端口负载
分析每个以太网端口负载情况。负载情况提供了通过端口传输的以太网报文的以太网端口利用率。结果支持总的、执行和调度开销的利用率。对于所有选定的路由,将在所有以太网端口上出现多播和广播消息。执行负载仅来自传输/执行时间。调度开销由OS或协议生成。
图9显示了包括ECU映射在内的所有以太网端口的平均负载。所有负载值都非常低,所以仿真结果没有问题。

图9 以太网端口负载仿真结果
3.4.4 总结
以上仿真结果表明,系统响应时间、负载和缓冲区填充水平均处于最小值,即处于较低水平。这些仿真信息应该用于在开发的早期阶段确定以太网网络的硬件,并为供应商的子系统和零部件设计开发提供输入。根据预期行为优化硬件需求也将硬件成本优化到必要的最小值。
4 结束语
车载以太网技术是解决智能网联汽车所需网络带宽的一项有效的技术,也是未来汽车发展中一种必然趋势,这将对传统汽车的整车网络架构设计和实现产生颠覆性的影响。本文描述了一个基于实际车型项目的车载以太网技术解决方案,包括拓扑设计、协议设计、仿真计算等。通过车载以太网技术的实现,该车型实现了基于服务的端对端通信,便于后续功能扩展;实现了基于以太网报文的车内数据上传云端,解决网络负载问题;实现了基于OTA的远程升级,满足整车快速迭代要求;实现了高安全级别的信息安全算法,提高整车安全等级,未来车载以太网将在音视频传输、高等级自动驾驶、安全备份等方面发挥更大的作用。
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
煤气与热力(2022年4期)2022-05-23
计算机应用文摘·触控(2022年6期)2022-04-15
中兴通讯技术(2021年5期)2021-11-25
汽车电器(2021年6期)2021-07-05
电子制作(2021年4期)2021-06-16
汽车零部件(2021年4期)2021-04-29
科学家(2021年24期)2021-04-25
通信产业报(2017年6期)2017-03-27