四轮驱动汽车转向状态下的横向稳定性控制研究
2019-09-19 07:41王春燕
重庆理工大学学报(自然科学) 2019年8期
高 琪,王春燕
(南京航空航天大学 能源与动力学院, 南京 210016)
随着消费者对汽车的动力性、安全性与操纵稳定性要求越来越高,越来越多的运动型车辆开始采用四轮驱动技术。四轮驱动汽车的4个车轮均能获得驱动力,可根据不同的行驶状态分配前后轴与左右轮之间的扭矩,使车辆充分利用地面附着力,从而改善车辆的动力性与操纵稳定性[1]。
四轮驱动汽车由于卓越的动力学性能引起了各方的重视,国外汽车厂商及学者们对其开展了研究,而国内在此方面的探索还处于初始阶段。由于核心技术需要从国外引进,相对于国外成熟的四驱技术还有着较大差距,因此开展对四轮驱动汽车扭矩分配技术的研究具有十分重要的意义,同时也能推进我国国防领域对于四轮驱动技术的应用。
动力学研究表明[2],车辆的性能会受轴间动力转移与轮间动力转移的影响,轴间动力转移对于车辆动力性的影响较大,轮间动力转移对车辆转向稳定性的影响较大。转向工况作为车辆行驶过程中最常见的工况,转向时的稳定性控制对于提高车辆的操纵稳定性至关重要,如何通过轮间扭矩分配实现横摆稳定性控制是四轮驱动技术的关键问题。
对于四驱汽车的稳定性控制,国内外学者已经开展了一定程度的研究。初期对于扭矩分配差速器设计的相关研究较多[3-5],随着技术的发展,近年来越来越多的人开始关注对控制方法的研究[6],如:Wang Q等[7]采用PI反馈控制,通过控制前桥两侧车轮之间的驱动力矩实现转向路径跟踪,有效提高了车辆的横向稳定性;Song P等[8]采用终端滑模控制,对四轮驱动车轮进行扭矩分配,将扭矩分配到每个车轮,并在多种工况下验证了该控制方法的有效性,结果表明:该方法可有效改善整车操稳性。随着技术的积累,关于四驱汽车稳定性控制的研究仍在不断的向前发展。
本研究基于转向稳定性考虑,讨论了四轮驱动汽车在转向工况下的横摆稳定性控制方法。首先介绍了四轮驱动汽车稳定性控制技术的研究概况,然后对四轮驱动汽车进行了动力学建模,采用分层控制方法分别设计车辆的上层控制器与下层控制器,对四驱汽车的轮间扭矩进行分配。最后通过仿真分析对所设计的控制方法的控制效果进行验证。
1 动力学模型及理想状态量
1.1 整车动力学模型
将四轮驱动汽车动力学模型简化成如图1所示的整车7自由度模型[9],可得到车辆的动力学平衡方程。

图1 整车7自由度模型
车辆的纵向运动方程为
Fx4-(Fy1+Fy2)sinδ
(1)
车辆的横向运动方程为
Fy4+(Fy1+Fy2)cosδ
(2)
车辆的横摆运动方程为

(3)
式中:m为整车质量;vx为纵向车速;vy为横向车速;δ为前轮转角;Fxi(i=1,2,3,4) 为轮胎纵向力;Fyi(i=1,2,3,4)为轮胎侧偏力;ωr为横摆角速度;a、b分别为质心到前、后轴的距离;d为轮距。
1.2 轮胎模型
轮胎模型采用魔术公式[10],其一般表达式为:
y(x)=Dsin{Carctan[Bx-E(Bx-arctan(Bx))]}
(4)
式中:y(x)为轮胎侧偏力、回正力矩或制动力;x为轮胎侧偏角或滑移率;B为刚度因子;C为曲线形状因子;D为峰值因子;E为曲线曲率因子。
1.3 理想状态量
根据整车经典2自由度模型[11],可以得到车辆的理想横摆角速度与理想质心侧偏角为:
(5)
(6)
2 控制策略
2.1 整体控制策略
由于汽车是一个比较复杂的系统,本文采用分层控制方法对系统进行控制,以降低控制器的阶数,使控制易于实现,同时也提高了系统的可靠性。整体控制框图如图2所示。
首先根据驾驶员输入、传感器测得的数据与汽车状态辨识模块预估出的汽车状态,参考汽车2自由度经典模型,得到汽车的理想横摆角速度与理想质心侧偏角;再将整体控制过程分为上层控制与下层控制,上层控制器通过对比当前的车辆状态与理想的车辆状态判断汽车的转向状态,计算出当前车辆要获得理想转向状态所需要施加的附加横摆力矩,下层控制器根据附加横摆力矩信息分配各车轮的扭矩,通过轮间扭矩分配改善车辆转向时的操纵稳定性。
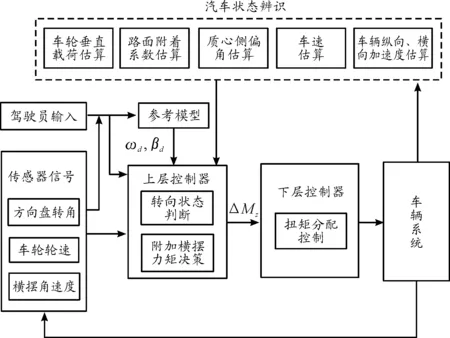
图2 四轮驱动汽车转向工况下横向稳定性控制框图
2.2 稳定性控制开启逻辑


图3 稳定性控制策略开启逻辑
2.3 上层控制器设计
2.3.1转向状态判断
为了更好地针对车辆当前的转向状态对车辆实施相应的控制,需要根据车辆的状态量对目前的行驶状态进行判断,主要是通过当前的横摆角速度、质心侧偏角与理想横摆角速度、理想质心侧偏角进行比较,从而判断车辆的转向方向与转向状态,获得转向状态后即可决定附加横摆力矩的施加方向,其具体判断逻辑如表1所示。
2.3.2附加横摆力矩决策
经过转向状态判断后,考虑到横摆角速度与质心侧偏角的耦合关系,本文的上层控制器采用滑模控制算法,同时对横摆角速度与质心侧偏角进行控制。由这两者与理想值的偏差共同决策附加横摆力矩,这种控制方法具有响应快速、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。
根据车辆的横摆运动方程可得:
d[(Fx2-Fx1)cosδ+(Fy1-Fy2)sinδ]/2Iz+
d(Fx4-Fx3)/2Iz-(Fy3+Fy4)b/Iz+ΔMz/Iz
(7)
忽略车辆纵向车速瞬时时刻变化值,可得质心侧偏角导数为
(8)
选取滑模切换函数为
s=ωr-ωd+k1(β-βd)
(9)
对切换函数求导,得
(10)
式中k1为一个正的常数,其值越大,滑模控制收敛速度越快。


(11)
选取滑模趋近律为
(12)
式中k2为正常数,表征了滑模控制使系统状态向滑模面s=0运动的趋近速度,以及到达滑模面之后向平衡点运动的收敛速度。
为了削弱因符号函数sgn(s)不连续性导致的控制系统抖振,采用饱和函数sat(s/k3)作为替代,公式如下:

(13)
联立式(11)(12)得附加横摆力矩为
ΔMz=-a[(Fx1+Fx2)sinδ+(Fy1+Fy2)cosδ]+
b(Fy3+Fy4)-d(Fx4-Fx3)/2-
d[(Fx2-Fx1)cosδ+(Fy1-Fy2)sinδ]/2-

(14)
2.4 下层控制器设计
下层控制器采用单侧车轮制动的方式将附加横摆力矩分配到各个车轮上,增大了附加横摆力矩的潜力,保证了车辆的轨迹保持能力,提高了车辆的极限行驶性能,其具体制动控制逻辑如表2所示。
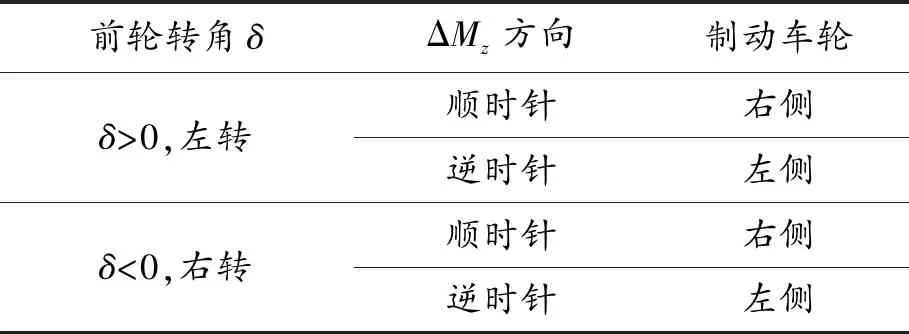
表2 单侧车轮制动控制逻辑
实施控制时制动侧前轮所需的制动力矩为
(15)
制动侧后轮所需的制动力矩为
(16)
制动轮所需的制动力为
(17)
式中:rw为车轮滚动半径;ωi(i=1,2,3,4)为各车轮转速;Fzi(i=1,2,3,4)为各车轮垂直载荷;f为滚动阻力系数。
3 联合仿真
为了验证所设计控制器的控制效果,本文在Matlab/Simulink与Carsim仿真环境下进行操纵性能仿真验证,并将分层控制与无控制的仿真结果进行对比。仿真车型为四轮驱动B级三厢车,变速器为自动6挡变速器,初始车速为50 km/h,路面材料为5 m gird,路面附着系数为0.8。Matlab/Simulink采用ode 45求解器,自动变步长求解,仿真时长为8 s。图4为分层控制时各车轮的制动压力,从图4中可以看出:在实施横摆稳定性控制时,采用的是车辆单侧车轮制动。
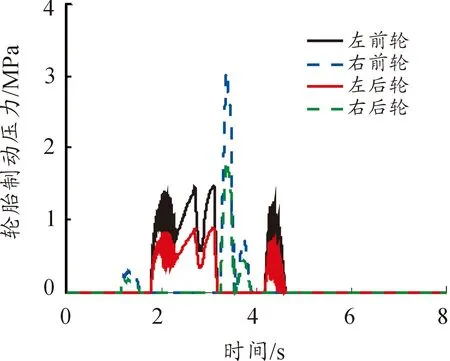
图4 各车轮制动压力
仿真结果如图5~8所示。图5为方向盘转角,图6为横摆角速度响应,图7为质心侧偏角响应,图8为侧向位移。
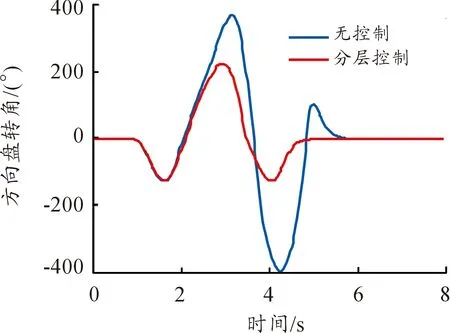
图5 方向盘转角
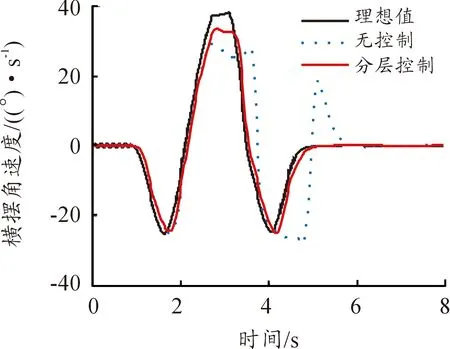
图6 横摆角速度响应

图7 质心侧偏角响应
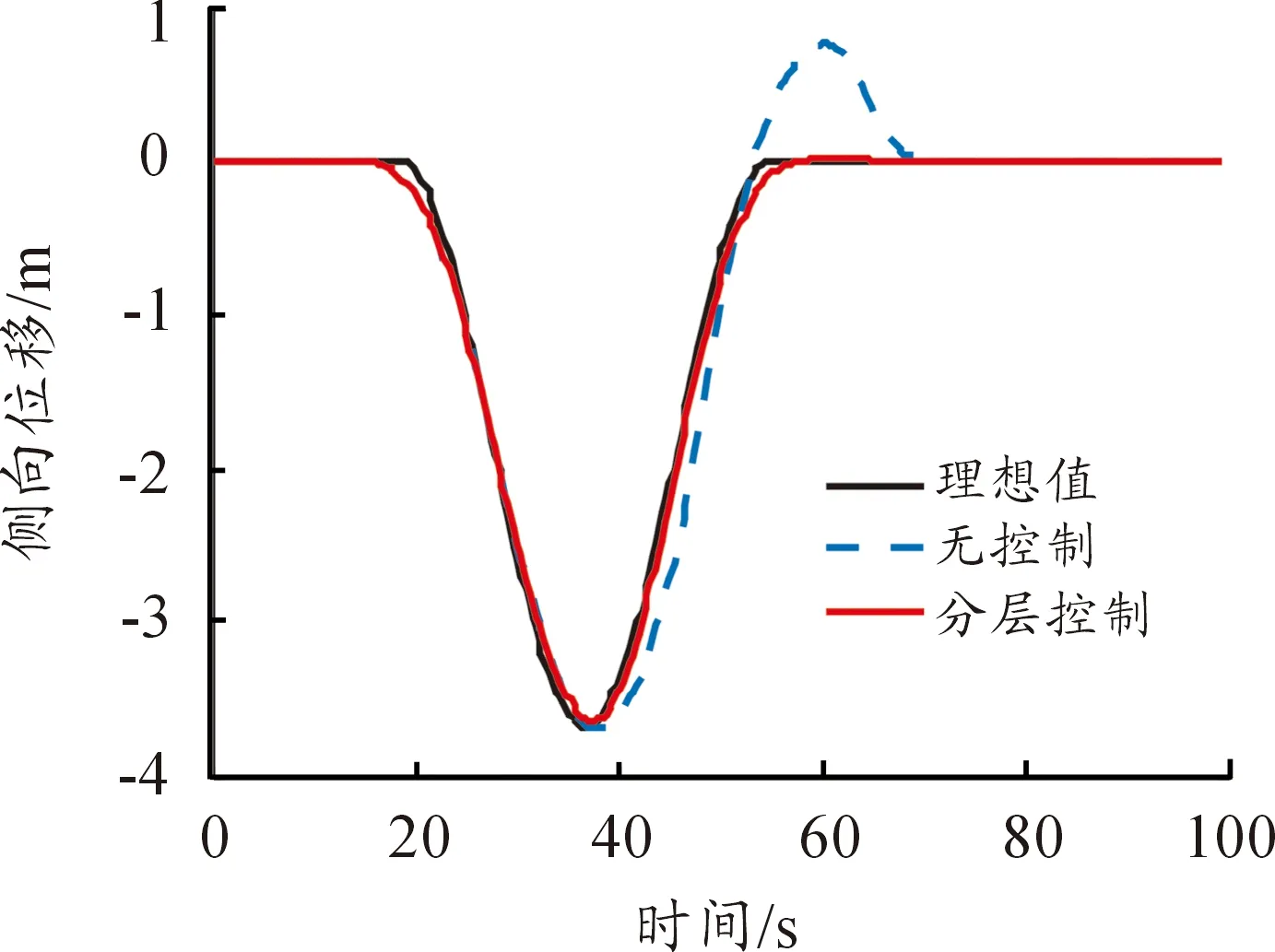
图8 侧向位移
从图6~7可以看出:采用分层控制后,车辆对于横摆角速度、质心侧偏角的跟踪效果更好。由图8可知:采用了分层控制的车辆基本是沿着目标路径行驶的,而未经控制的车辆会产生一定的路径偏移。仿真结果中的响应量平均误差如表3所示。
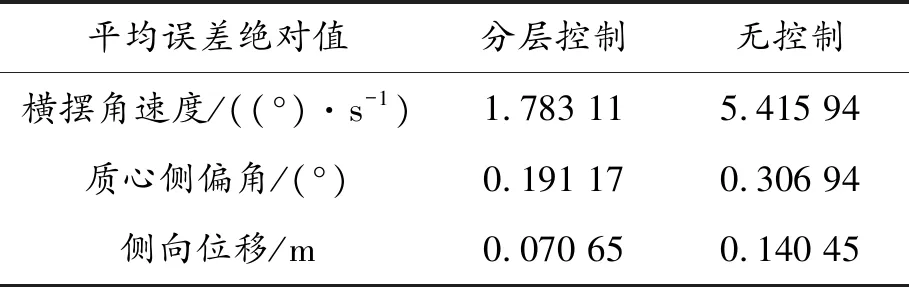
表3 响应量平均误差
由表3可知:采用分层控制的车辆横摆角速度的平均误差比无控制的车辆减少了67.08%,质心侧偏角平均误差减小了37.72%,侧向位移平均误差减小了49.70%,说明分层横向稳定性控制能够较有效地改善四轮驱动汽车在转向工况下的操纵稳定性,使其在保证动力性的同时提高安全性。
4 结束语
本文针对四驱车辆的转向工况,设计了一种分层控制横向稳定性控制策略。上层控制器首先对转向状态进行判断,并根据滑模控制理论,以车辆的横摆角速度与质心侧偏角为目标,决策出应当施加在车辆上的附加横摆力矩,下层控制器将附加横摆力矩分配到各个车轮上。采用Carsim与Matlab/Simulink联合仿真对所提出的控制方法进行验证。结果表明:分层控制在转向状态下能够有效对四驱车辆进行横向稳定性控制,改善车辆的状态响应,提高操纵稳定性。
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国火炬(2015年1期)2015-07-25
中国铁道科学(2015年4期)2015-06-21
车迷(2015年6期)2015-03-20
汽车文摘(2014年10期)2014-12-13
汽车电器(2014年5期)2014-02-28