
雾天环境对高速公路车辆跟驰安全的影响
2019-09-12 08:09刘兆惠虞春滨
重庆交通大学学报(自然科学版) 2019年9期
刘兆惠,虞春滨,王 超,李 倩
(1. 山东科技大学 交通学院,山东 青岛 266590; 2. 河海大学 土木与交通学院,江苏 南京 210098)
0 引 言
高速公路是重要的交通基础设施之一,随着交通量急剧增加,道路交通事故频发,尤其是雾天等不良天气条件所引发的重特大交通事故,造成了人员和财产损失巨大[1]。雾天环境一方面会加大行车风险,增加驾驶员心理负担[2-3];另一方面则会降低道路通行能力,增加相邻道路负担,进而影响整个公路网系统[4-6]。因此,建立一个相对完善的不良天气条件下高速公路车辆跟驰安全系统是目前课题研究的重点。
跟驰模型在无人驾驶车辆、交通安全预警领域具有重要研究价值,国内外学者从应用出发开展了大量研究工作[7-9]。其中,P.G.GIPPS[10]提出了安全距离模型,其核心思想是确保当前车紧急制动时,后车驾驶员能及时停车并留有足够的安全距离;郭海峰等[11]就车辆跟驰模型参数标定进行了深入研究,指出性能指标参数选择要能恰当体现出具体的跟驰行为。学界还根据实际交通状况对跟驰模型加以改进,陈春燕等[12]考虑到驾驶员记忆效应,对传统跟驰模型进行改进,有效提高了系统稳定性。在不良天气对交通行为、交通安全影响方面,学界分别研究了不同安全系统和防范措施:意大利为保障雾天条件下行车安全,采用了“抗雾智能公路”系统[13];沪宁高速公路建立了自主研制的AWMS系统;安徽省计划在全省各高速公路上建立恶劣天气监测预警系统等。目前较先进应对不良天气的技术是通过自组织网络进行安全预警,但尚处研究阶段[14]。
笔者在此基础上,提出了雾天高速公路车辆跟驰安全系统。通过对跟驰模型参数修正,模拟交通流在雾天天气下的动态特性;通过采集到的交通信息,可对车辆进行微观层面分析,有助于探索雾天环境下交通流特性[18];通过构建雾天高速公路安全系统辅助驾驶员进行决策,从而在保障驾驶员行车安全同时提高行车效率,缓解交通压力,亦有助于对道路通行能力和服务水平展开深入研究。
1 雾等级判定
按文献[15]规定:当水平能见度低于1 km时记为雾,水平能见度在1~10 km记为轻雾。气象预报所发布雾的预报远不能满足高速公路交通安全管理需要,故需对1 km以下的雾进行分级预报。笔者运用模糊聚类分析法对雾的等级进行判定。
1.1 数据标准化
1.1.1 数据矩阵
设论域U={x1,x2,Λ,xn}为被分类对象,每个对象又由m个指标表示其性状,即xi={xi1,xi2,Λ,xim},(i=1,2,Λ,n),得到原始数据矩阵为:
1.1.2 数据标准化
根据模糊矩阵要求,将数据压缩到[0,1]上,有以下两种方法。
1)平移-标准差变换,如式(1)、(2):
(1)
(2)
变换后的变量均值为0,标准差为1,且消除了量纲影响,但x′k不一定在[0,1]上。
2)平移-极差变换,如式(3):
(3)
显然有0≤x″k≤1,且消除了量纲影响。
1.2 标 定
对原始数据矩阵按传统聚类方法确定相似系数,建立模糊相似矩阵rij=R(xi,xj)。确定rij的方法主要借用相似系数法和距离法,视具体研究对象而定。
1.3 聚类分析
1.3.1 传递闭包法
将R改造成模糊等价矩阵R*,用二次方法求R的传递闭包t(R),得到t(R)=R*,然后进行聚类分析。
1.3.2 布尔矩阵法
设R为论域U={x1,x2,Λ,xn}上的模糊相似矩阵,要得到U的元素在λ水平上的分类,可直接由相似矩阵R作其λ-截矩阵Rλ,显然Rλ为布尔矩阵,然后进行聚类分析。
2 雾天车辆跟驰模型
2.1 安全距离
当前车突然减速,后车驾驶员在看到制动信号后随之制动直至停车,需经历3个阶段:即后车驾驶员制动反应时间t1、后车制动协调时间t2和持续制动时间t3;这3个阶段时间内汽车所行驶的距离分别为S1、S2、S3。为简化计算,S1可看成匀速运动,S2可看成匀速运动和变减速运动的结合,S3可看成匀减速运动,得到制动安全距离如式(4):
(4)
式中:S0为停车后两车的车头间距值(一般取5 m);v0为初速度;t为制动反应时间(一般为2.5~3.0 s);g为重力加速度9.8 m/s2;φ1为前车车胎与路面的附着系数;φ2为后车车胎与路面的附着系数。
由此可得到3种不同状态的安全车距:
1)一般安全距离,如式(5):
(5)
2)充分安全距离,如式(6):
(6)
3)基本安全距离,如式(7):
(7)
2.2 能见度对车速影响
通过统计分析,得到能见度500 m内小客车能见度-速度趋势,如图1。
由图1可看出:① 小客车行车速度随着能见度的减少而降低。② 当能见度在200~500 m时,速度下降值相对较小;在100~200 m时,速度下降开始加快;在50~100 m时,速度随能见度下降而急剧下降。
根据经验,该曲线可拟合成对数,其函数关系如式(8):
y=aln(x)+b
(8)
式中:x为能见度值;y为速度值。
2.3 湿度对摩擦系数影响
路面状况对车辆运行安全性能具有显著影响,我国高速公路要求采用A级石油沥青或改性沥青,这种沥青适应性较强,能较好满足行车需要[16]。但在雾天环境下空气湿度相对较大,道路表面湿滑,给行车安全带来风险。笔者通过水膜厚度模拟道路潮湿程度,通过算例得到湿度与摩擦系数关系,试验对象为新旧两种沥青路面(AC-16)与由SMA-16、OGFC-13沥青混合材料路面。试验根据路面是否存在水和水膜厚度将路面分为干燥、潮湿、湿润这3种情况,潮湿与湿润的划分值为水膜厚度0.05 mm,这里主要研究潮湿范围内关系,然后控制其他条件进行试验,得出水膜-摩擦系数关系,如图2。

图2 水膜-摩擦系数关系Fig. 2 Relational graph of water film and friction coefficient
由图2中可看出:同一路面材料在不同路面状态下的摩擦系数不同,不同路面材料在同一路面状态下的摩擦系数也不同。笔者仅考虑同一材料下不同路面状态下摩擦系数变化,得出如下结论:① 旧路面条件:路面湿度对摩擦系数影响较小;② 新路面条件:在干燥和不同潮湿程度情况下,摩擦系数存在突变情况,摩擦性能对路面干燥与否非常敏感。
2.4 适应性分析
通过能见度和湿度对安全距离跟驰模型进行修正,得出不同雾天等级下的充分安全车距。通常,车间距和车辆行驶速度满足正态分布规律,多数驾驶员的行驶车速和跟驰距离在理论安全距离内。在保证安全前提下提高车流量,就需要以实际运行特性为标准,理论值为校准值重新确定标准,通过加权平均法进行数据融合,得到式(9):
y=αx1+(1-α)x2
(9)
式中:x1为理论值;x2为统计值;α为权重。
3 实例分析
笔者以某沿海高速公路作为目标路段,主要针对小客车,然后对采集到的交通数据和气象信息进行数据融合分析。
3.1 雾天等级分类
充分考虑能见度和湿度的影响,能见度范围在50~500 m,通过MATLAB进行处理,获得原始数据矩阵、标准化矩阵、传递闭包矩阵、截矩阵,分别如图3~6。

图3 MATLAB原始数据矩阵Fig. 3 Original data matrix by MATLAB
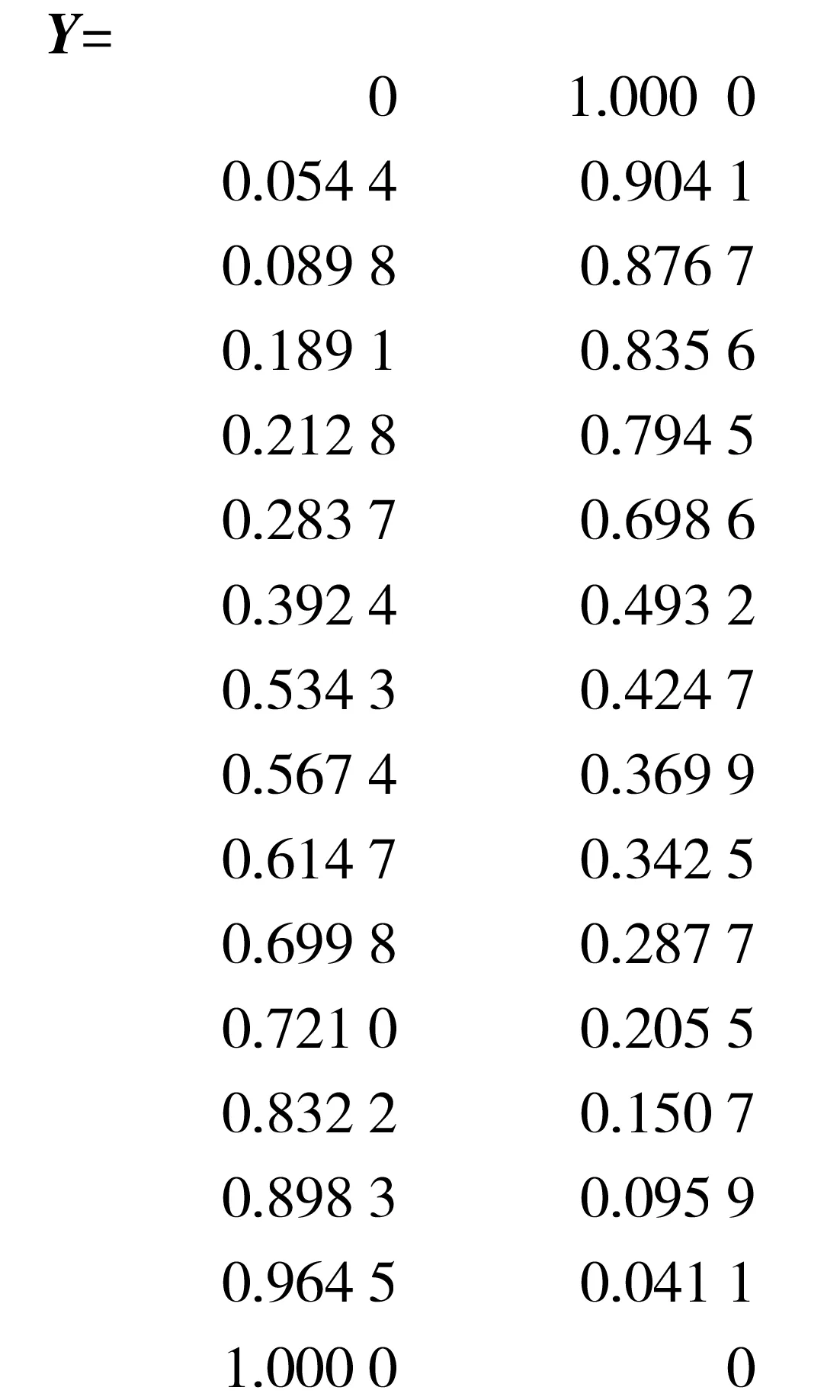
图4 MATLAB标准化矩阵Fig. 4 Normalized data matrix by MATLAB

图5 MATLAB传递闭包矩阵Fig. 5 Transitive closure matrix by MATLAB

图6 MATLAB截矩阵Fig. 6 Cutting matrix by MATLAB
得到分类{x1,x2,x3,x4,x5,x6}为第1类,{x7,x8,…,x16}为第2类。
综上所述,以能见度200 m、湿度值90%为分界线,即能见度在50~200 m、湿度大于90%为浓雾等级;能见度在200~500 m、湿度在85%~90%为大雾等级。
3.2 能见度对速度修正
能见度在200~500 m时,绘制散点图进行拟合,能见度-车速关系如图7,车速误差分析如图8。由此得到数学表达式如式(10):
y=5.052 19 lnx+ 45.801
(10)
能见度在50~200 m时,绘制散点图进行拟合,能见度-车速关系如图9。由此得到数学表达式如式(11):
y=13.184 87 lnx+ 5.722 63
(11)

图7 能见度-车速关系(能见度在200~500 m)Fig. 7 Relationship between visibility and speed

图8 车速误差分析Fig. 8 Error analysis of vehicle speed

图9 能见度-车速关系(能见度在50~200 m)Fig. 9 Relationship between visibility and speed
3.3 湿度对摩擦系数修正
对于实际运行一年以上的高速公路,路面状况可认为趋于稳定。由图2分析得到:旧路面摩擦系数对于水膜厚度影响较为缓和,为简化研究可认为湿度达到90%及以上路表面为很接近湿润状态,这里不考虑之后的摩擦系数突变,湿度为85%~90%时路表面为潮湿状态。
通过在干燥与潮湿,潮湿与湿润间取平均值,再结合雾天等级综合判定,得到在大雾等级下路面摩擦系数为0.7,浓雾等级下路面摩擦系数取为0.65。
3.4 充分安全距离计算
3.4.1 大雾等级
大雾等级的计算如式(12):
(12)
式中:v′0=5.052 91ln(x)+45.801,x=500 m,t=3.0 s。
由此得到v′0=77.198 km/h,取整得v′0=80 km/h;φ′2=0.7;S′v=110 m。
3.4.2 浓雾等级
浓雾等级的计算如式(13):
(13)
式中:v″0=13.184 87ln(x)+5.722 63,x=50 m,t=3.0 s。
由此得到v″0=57.302 km/h,取整得v″0=60 km/h;φ″2=0.65;S″v=80 m。
根据以上结果,该路段在不同级别雾天环境下的行车限速及车距标准见表1。
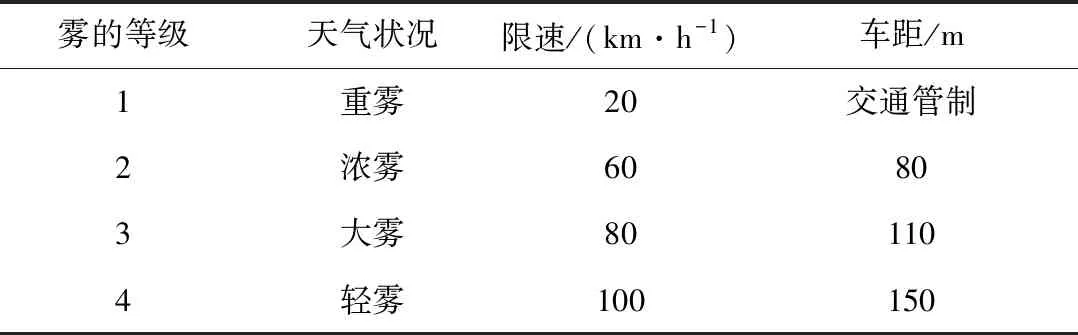
表1 高速路段行车理论值Table 1 Theoretical value of driving on expressway
3.5 统计数据融合
数据融合的计算如式(14):
(14)

当总体方差最小时,最佳权重如式(15):
(15)

通过计算,能见度在50~200 m,车速取65 km/h;能见度在200~500 m,车速取75 km/h。
通过加权平均法将该路段行车理论值和统计分析值进行融合,根据专家估测法确定融合权重。设因素集U={u1,u2,Λ,un},现有k个专家独自给出各因素ui的权重,取各因素权重平均值作为其权重,如式(16)。
(16)
式中:aij表示专家i对于因素uj的权重。
由此得出新的限速标准如表2。

表2 数据融合后的限速标准Table 2 Speed limit by data fusion km/h
4 结 论
1)给出雾天高速公路不同路段雾浓度等级判断方法。应用模糊聚类分析方法判定得到不同路段的雾浓度等级,并研究不同等级路段上车辆的行车特性,为跟驰模型的构建提供依据。
2)对车辆跟驰模型进行改进,考虑到能见度和湿度影响,对模型中的参数进行修正,建立了不同雾天等级下的安全跟驰模型,得到理论安全距离值;通过对原始数据统计分析,得到相应参考标准值。
3)将上述两类数据进行数据融合后,得出了雾天环境下的行车安全标准参考值,为雾天高速公路车辆跟驰安全提供了相应理论依据,但没有考虑驾驶员特性。
4)下一阶段将重点研究其他交通环境因素对跟驰车相应行为的影响,深刻理解单车道交通流特性,采用多种技术手段提高跟驰模型精度,为无人驾驶车辆自主决策提供保障。
猜你喜欢
中外公路(2022年1期)2022-05-14
中国新技术新产品(2022年21期)2022-02-01
气象水文海洋仪器(2021年4期)2021-12-11
阅读(科学探秘)(2021年10期)2021-03-08
中学生数理化·八年级物理人教版(2020年3期)2020-10-29
小学阅读指南·低年级版(2018年1期)2018-03-14
中国交通信息化(2016年6期)2016-06-06
家教世界·创新阅读(2016年5期)2016-05-14
中国学术期刊文摘(2015年10期)2015-10-31
中国铁道科学(2015年5期)2015-06-21
