
GPS动态观测中的信号滤波方法研究
2019-09-12 08:09黄国斌谭兴龙
重庆交通大学学报(自然科学版) 2019年9期
黄国斌,谭兴龙
(1.江苏建筑职业技术学院,江苏 徐州 221116; 2.江苏师范大学,江苏 徐州221116)
0 引 言
随着全球卫星定位技术的发展,以GPS为代表的卫星动态监测技术成为获取物体实时位置、监测物体动态变化的主要手段[1-2],GPS动态监测技术具有高精度、实时性、便捷性等优势,在高层建筑物振动观测、桥面变形监测、大坝安全监测等领域取得了很好的应用效果[3-4]。GPS动态监测在高采样频率的数据采集模式下,数据容易受到各种复杂信息的干扰[5],解算得到的动态变化信息中含有噪声等多余信息,无法直接得到被监测体的动态特性,需要对观测数据进行滤波和有用信息提取,才能得到需要的动态变化信息。
GPS动态监测数据滤波常用的方法有小波分析等方法[6],但是其在数据处理时需要选择小波基函数,不同的基函数具有不同的时频特性,同时,在小波滤波中改变分解层数、选择不同的阈值、采用不同的滤波准则,都会得到不同的滤波效果,在工程应用中滤波效果具有不确定性,这对于高准确性的GPS动态监测数据分析十分不利,设法采用新的数据处理方法处理GPS动态监测数据成为必然。EMD可以在不需要基函数的情况下仅依据信号自身时间尺度对信号进行分解[7],能够将信号分解为固定数量的本征模函数(intrinsic mode function, IMF),IMF由观测信号唯一确定,各IMF分量包含了信号不同时间尺度的局部特征,通过IMF分量可以提取信号的丰富的高频和低频信息。与小波分析、傅里叶分析相比,EMD是直观的、直接的、后验的,同时,由于分解是基于信号序列时间尺度的局部特性,因此具有自适应性[8]。EMD多用于非线性、非平稳序列信号的分析与处理。
将EMD滤波与小波分析滤波方法应用于GPS动态监测数据处理,并研究了一种EMD小波组合滤波法,将上述3种滤波方法进行实验分析,结果表明EMD小波组合滤波方法滤波效果优于小波滤波、EMD滤波,研究内容为提高GPS振动监测数据的信号提取精度提供参考。
1 EMD原理与EMD滤波
EMD是经验模态分解(empirical mode decomposition)的简称,EMD的主要思想是EMD分解,在满足分析约束条件下对信号进行整体分解。将信号分解为IMF时必须满足以下约束条件:函数局部极值点个数必须等同于过零点的个数,最多只能相差一个;信号需要满足对时间轴的局部对称性。
主要分解过程如下:
1)确定信号f(t)所有局部极值点位置;
2)使用3次样条函数对f(t)的所有极值点进行拟合,获得极值点插值形成的上包络线H(t)与下包络线L(t),计算上下包络线的平均值得到信号的均值包络m(t):
(1)
3)计算原始信号f(t)与m(t)的差值d(t):
d(t)=f(t)-m(t)
(2)
在满足约束条件下,则d(t)确定为第1个IMF分量,记作c1(t),并继续执行步骤4),否则将d(t)视为原信号返回步骤1),重复上述步骤;
4)用原始信号f(t)与d(t)作差得到剩余信号序列r(t):
r(t)=f(t)-d(t)
(3)
5)取剩余信号序列r(t)为新数据,重复1)~3)步骤,得到第2个IMF分量c2(t),据此重复所有的迭代,直到获得所有的IMF分量:
(4)
6)循环结束,原始信号f(t)经过EMD分解得到:
(5)
这样就把含噪信号f(t)分解为从高频到低频的IMF分量ci(t)和残余分量rn(t),从而根据信号的先验信息实现带通滤波。EMD分解后信号光滑,能够很好的分离出低频趋势项。理论上,EMD可应用于任何类型的信号分解,在处理非线性、非平稳信号上具有很大的优势,同时也具有很高的信噪比。在地震记录分析、土木工程结构模态参数识别、天体观测、机械故障诊断等工程领域得到了广泛的应用[9]。
EMD分解之后,就是判定IMF分量是信号主导分量还是噪声主导分量,目前主要有4种判断方法:自相关函数法、能量值法、频谱法,累积均值法,实验对比发现能量值法效果较好,能量值法判断信号特性主要原理如下。
在不考虑实际量纲的情况下,把信号f(t)的平方对时间的积分称为信号的能量,其计算公式为
(6)
据此将计算各IMF分量能量值。由噪声主导的分量其能量值较小,由信号主导的分量其能量值较大,各阶分量从噪声主导部分到由信号主导部分能量值会有一个突变,假设前m个分量由噪声主导,则有Em≪Em+1,据此实现对各IMF分量的判断。
当确定了IMF分量是噪声主导分量时,直接舍去,当确定IMF分量是信号主导分量时,给予保留,再将其与残余分量进行合成,这就完成了对信号的信息提取。有用信号由式(7)确定:
(7)
式中:m~n为信号主导分量的序列。
2 小波分析原理与小波滤波
小波变换是小波分析的核心,小波变换是将信号分解成一系列小波函数的叠加,这些小波函数都是由一个小波基函数经过伸缩与平移形成的函数集合。设满足条件的小波基函数为φ(t),小波基函数经过平移τ和伸缩a后得到:
(8)
式中:τ为时移因子;a为尺度因子,将与信号作卷积,其连续小波变换公式为
WTf(a,τ)=[f(t),φa,τ(t)]=
(9)
小波变换是时间和频率的变换,能通过伸缩和平移等运算功能对信号进行多尺度细化分析。在此变换中,低频信号可以采用较低的时间分辨率,以提高频率的分辨率,高频信号可以用较低的频率分辨率来换取精确的时间分辨率。
小波分析可以应用于信号滤波,小波滤波方法有小波包滤波、小波变换模极大值滤波、小波阈值滤波等。其中小波阈值滤波是一种效果较好、应用较多的滤波方法[10],小波阈值滤波的步骤如下:①信号f(t)小波分解,选择一个合适的小波基函数和合理的小波分解尺度N进行小波分解;②高频系数阈值量化,对分解后各尺度的高频部分选择合适的阈值δ进行处理,所有小于δ的小波系数被划为噪声,它们取0,而超过阈值δ的小波系数的数值被缩减后再重新取值;③信号f(t)小波重构,将分解后各层低频部分和经阈值处理后的高频部分进行小波重构,获得滤波后信号。小波阈值滤波的核心在阈值的选取,它直接关系到降噪的质量。同时小波基函数的选择、分解层数确定等都会影响滤波效果。
3 EMD小波组合滤波法
EMD滤波方法直接舍去高频IMF分量,将低频IMF分量相加完成滤波,该滤波方法会同时去掉有用信号,同时,由于信号间断和信号间相互作用,会引起模态混叠现象,造成一个IMF分量中出现几个不同频率成分,引起EMD分解失败。小波滤波效果和基函数、分解层数、阈值等有关,选择不同的参数得到的滤波效果不同,同时,小波滤波会平滑掉信号突变、局部细节变化等信号中丰富的成分。
针对以上问题,笔者研究了一种EMD联合小波的组合滤波法,该方法的主要思想是先对信号进行频谱变换,若其频率峰值区间多于5个,则为了避免EMD分解出现模态混叠现象,不进行EMD分解,采用小波滤波;若其频率峰值区间少于5个,则先对信号进行EMD分解,得到各个IMF分量,然后判定各个分量是信号主导分量还是噪声主导分量;对噪声主导分量进行小波滤波法处理,提取其剩余信号,滤波时分解层数不小于5层,滤波后进行频谱变换,判断滤波效果,当其频谱峰值接近于0时,滤波完成;同时,对信号主导分量采用小波滤波,滤波时选择对称性、正则性好的小波基函数,分解层数不超过3层,滤波后信号的均方根误差不大于0.1;据此完成所有分量的滤波,将所有处理后的分量合成,得到滤波后的信号。
该方法的关键是将EMD分解后的噪声主导分量和信号主导分量采用不同的小波滤波参数完成滤波,这是由于噪声主导分量其主要成分是噪声,必须去除所有的噪声,要求滤波时增加分解层数,并对滤波后的信号进行频谱变换,判断滤波效果,否则,将含噪信号用于合成最终信号会使信号失真。信号主导分量其主要成分是信号,所含噪声极少,需要保证信号不能被去除,需要减少分解层数,并采用均方根误差评价其滤波前后信号差异。
4 实验分析
采用的实验数据是苏通大桥GPS动态监测数据,苏通大桥是连接苏州和南通的特大双塔双索面钢箱梁斜拉桥,全长8 146 m,为了保证苏通大桥的安全,需要定期对其进行GPS动态监测。监测采用Trimble5700双频GPS接收机,1个基准站位于岸边开阔地带的固定观测墩上,另外在主桥的索塔和跨中位置布设监测站,监测桥梁动态变化,GPS采样频率为10 Hz,卫星高度角为15°。选择跨中高程方向的部分监测数据进行实验分析,原始观测如图1。

图1 原始观测序列Fig. 1 Original observation sequence
可以发现该监测点受各类复杂因素的影响严重,从图中无法获取桥梁的动态变化特性。为了更好的分析信号,对其进行频谱变换,将监测点时域内的时间序列转换为频谱内的频率和振幅,经变换后原始信号的频谱图如图2。
从图2可以发现监测序列频谱范围是0~0.25 Hz,频率的峰值主要集中在0~0.05 Hz,在其它频段无峰值,该信号符合频率峰值区间不多于5个的要求,对其进行EMD分析,得到11个IMF分量和一个残余分量,见图3。

图3 各个IMF分量和残余分量rtFig. 3 Each IMF component and residual component (rt)
EMD分解之后需要判断各IMF分量是噪声主导分量还是信号主导分量,采用能量值法判断准则,计算所有IMF分量的能量值,结果见图4。

图4 各IMF分量能量Fig. 4 Energy of each IMF component
可以发现第6个分量的能量值增量最大,依据能量判断准则,可以认为前5个分量是噪声主导分量,从第6个分量开始是信号主导分量。对噪声主导分量进行小波滤波处理,滤波时选择去噪效果好的sym12小波基函数[8],进行5层尺度分解,采用自适应阈值准则的全局滤波法,IMF1~IMF5分量小波滤波效果见图5。同时采用信噪比、均方根误差、平滑度指标对其进行滤波效果评价,各分量滤波后各项指标见表1。

图5 噪声主导分量小波滤波效果Fig. 5 Wavelet filtering effect of dominant component of noise

评价指标信噪比均方根误差平滑度IMF179.688.810.01IMF280.734.880.63IMF391.792.920.89IMF4109.771.460.16IMF5129.680.780.50
为了验证其滤波效果,对所有噪声主导分量进行频谱变换,信号的频谱分析可以获得信号各个频率成分和频率分布范围,噪声主导分量频谱中心远离0值,信号主导分量的频谱中心靠近0值,经滤波后的噪声主导分量其频谱中心要0值,图6各分量满足要求。

图6 噪声主导分量滤波后频谱Fig. 6 Spectral image of dominant component of noise after filtered
现对信号主导分量进行小波滤波处理,滤波时选择正则性好的sym3小波基函数,分解尺度为2层,采用自适应阈值准则,为了保证信号不被滤除,要求滤波后信号均方根误差不大于0.1,IMF6~IMF11小波滤波效果见图7,各分量滤波后各项指标见表2。

表2 信号主导分量评价指标Table 2 Evaluation index of dominant component of signal


图7 噪声主导分量滤波效果Fig. 7 Filtering effect of dominant component of noise
将小波滤波后的各个分量与残余分量合成滤波后的信号,这样就完成了信号滤波,同时采用EMD滤波、小波滤波对信号滤波,对比3种滤波效果的好坏,并采用信噪比、均方根误差、平滑度指标对其量化分析,各评价指标见表3,3种滤波效果见图8。

表3 3种滤波方法评价指标Table 3 Evaluation index of three filtering methods
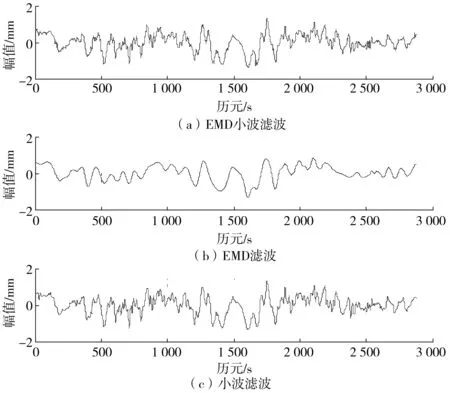
图8 3种滤波方法Fig. 8 Three filtering methods
从图8可以看出传统EMD滤波后信号的细节部分丢失,EMD小波联合滤波和小波滤波效果相当,但从评价指标来看,EMD小波滤波各项评价指标最优,说明采用EMD小波联合滤波方法提高了传统EMD滤波的效果,是一种很好的滤波方法。
5 结 语
EMD仅根据信号自身特性进行信号滤波,能够得到唯一的滤波结果,是一种有效的信号滤波方法。为了提高EMD滤波效果,将EMD联合小波滤波,并采用频谱分析和均方根误差评价指标分别衡量滤波效果,获得了较好的效果。针对笔者提出的EMD小波组合滤波法,在实际应用中可以根据需要确定小波滤波参数和评价指标,以达到更好的滤波效果。研究为提高EMD滤波精度提供参考。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
科技风(2021年19期)2021-09-07
空间科学学报(2021年6期)2021-03-09
电子制作(2019年13期)2020-01-14
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
制造技术与机床(2017年10期)2017-11-28
人民音乐(2016年3期)2016-11-07
空间控制技术与应用(2015年2期)2015-06-05
