
基于Matlab/Simulink 软件在车门限位器主臂曲线上的分析研究
2019-09-11 03:02:18蒋东强姜帆李随江杨建超
汽车实用技术 2019年16期
蒋东强,姜帆,李随江,杨建超
(陕西汽车控股集团有限公司,陕西 西安 710200)
引言
车门的限位器设计包括了限位器的主臂曲线设计,其设计方法多采用分段画圆-单元逼近法,设计准确性与分段数直接相关(分段数越多越准确),设计人员手工绘制过程较为繁琐也容易出错。本文对单元逼近法做以了简要介绍,并由此对限位器的主臂曲线进行了分析研究,推导出了数学方程式,并借助Matlab/Simulink 软件编写了计算程序,建立了曲线求解框图模型,通过信源控制得出了不同形状的主臂曲线,为此类设计工作提供参考依据和方法。
1 单元逼近法
单元逼近法是目前限位器主臂曲线设计时最常用的设计方法。下面以某卡车车门开启角度85°平均分为10 段为例,简要介绍图1 所示单元逼近法求取限位器主臂曲线的过程。
图1 所示限位器主臂曲线绘制过程图。(1)将DE、CF绕A 点旋转10 等份(每一等份旋转角度为8.5°),可以得到D1E1、D2E2…D10E10 和C1F1、C2F2…C10F10。(2)以B 点为圆心,分别以BC、BC1、BC2…BC10 为半径画圆,圆分别与C1F1、C2F2…C10F10 交于点G1、G2…G10,擦除多余线段G1F1、G2F2…G10F10。(3)将C10G10 绕B 点反向旋转,G10 与C9 重合,依次类推得到折线CC10,此间C10 在反向旋转过程中须始终落在最外圆边界上。折线CC10光滑处理后就得到了限位器主臂曲线,当然还应加上BC 段。

图1 单元逼近法
2 方程式推导

图2 分析图
(x1,y1)——限位器盒中心C 点的运动轨迹点 (x,y)——初始位置的限位器主臂曲线上的点 a、b、c——△ABC的边长 E——限位器主臂曲线绕B 点的旋转角度。
通过观察分析图2 我们看到C 点的运动轨迹点,即(x1,y1)都落在了以A 点为圆心b 为半径的圆弧上,且与B点坐标(BX,BY)的距离为a;( x1,y1)点可以从( x,y)以B 点为中心a 为半径旋转E 度角得到。我们可以推导如下方程式:
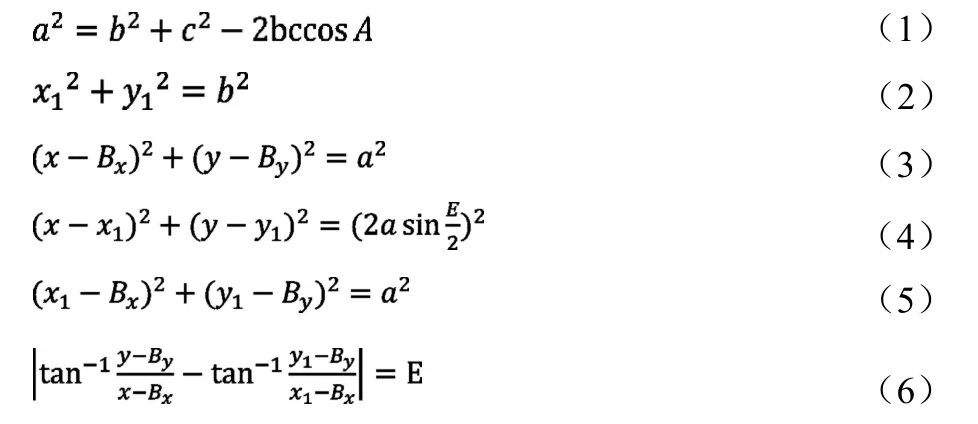
通过方程式(1)、(2)、(3)我们可以得到(x1,y1);(4)、(5)、(6)是限位器主臂曲线(x,y)的必要条件方程。
3 Matlab/Simulink 的编程求解
虽然(4)、(5)、(6)仅是限位器主臂曲线(x,y)的必要条件方程,满足这些方程的曲线有很多,但当我们对角度E 作为单独条件接信号输入,其主臂曲线就只有一条,且主臂曲线形状可由输入信号的改变而变化。输入的信号可以是斜坡信号、正弦信号等,通过改变信号的幅值、频率、比例等参数,可改变主臂曲线线条形状,以避开车门内、外板、玻璃升降器等所占空间,最后确定的主臂曲线应在门闭合时C 点y 轴坐标以上的二维坐标区域中,且当主臂曲线以B 点旋转终了时,即当车门打开到最大角度状态下,主臂曲线不能在旋转过程中扫过铰链旋转中心点A,应保持有一定的距离。
3.1 Simulink 建模
根据方程式(1)、(2)、(3) 、(4)、(5)在Simulink 中建立图3 框图模型。我们以某卡车车门设计参数作为输入:b=83.2;Bx=60;By=39;A=21.9;运行模型。仿真时间应根据车门开启角度确定(一般卡车车门最大开启角度在85°~88°),即AC 初始位置与最终位置的夹角。这里仿真时间定为1.53s,最大步长0.01。

图3 框图模型
3.2 Matlab 中的曲线图表
在command window 窗口输入以下命令,得到限位器盒中心点(x1,y1)曲线图见图4。
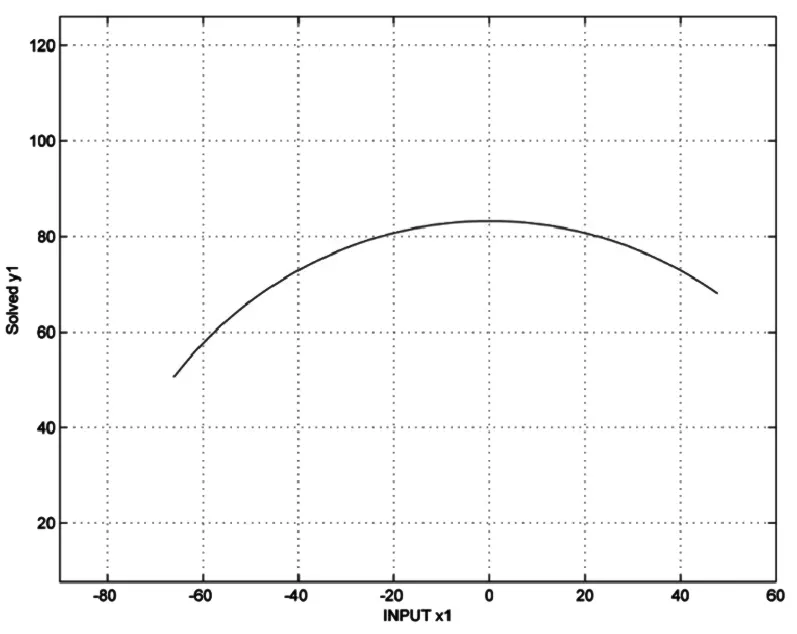
图4 x1~y1曲线图
plot(simout(:,5),simout(:,6))
axis([-90 60 40 90])
axis equal
xlabel('INPUT x1')
ylabel('Solved y1')
grid on
在command window 窗口输入以下命令,得到E 角度以正弦信号作为输入的限位器主臂曲线图5。
plot(simout(:,7),simout(:,8))
axis([-40 70 40 180])
axis equal
xlabel('INPUT x')
ylabel('Solved y')
grid on

图5 x~y 正弦信号主臂曲线图

表1 参数值
通过查看矩阵simout 的参数值表1,我们看到限位器主臂曲线(x,y)是从x 轴47.812 开始到1.5019 结束,结束点过于接近A 点的y 轴,即限位器主臂曲线在车门闭合状态下的位置可能会碰到门外板,而这正是我们设计时应避免的情况。我们将E 角的正弦信号的幅值由1 调整到1.2,将频率由1 调整到0.9,再次运行程序得到调整后的限位器主臂曲线图6。

图6 x~y 正弦信号主臂曲线图
通过矩阵simout 参数值表2,我们看到限位器主臂曲线(x,y)是从x 轴47.812 开始到22.352 结束,结束点远离了A点的y 轴。同样,我们根据车门内板、玻璃升降器等在车门内占据的位置调整E 角度正弦信号参数,进而调整曲线形状避免干涉。
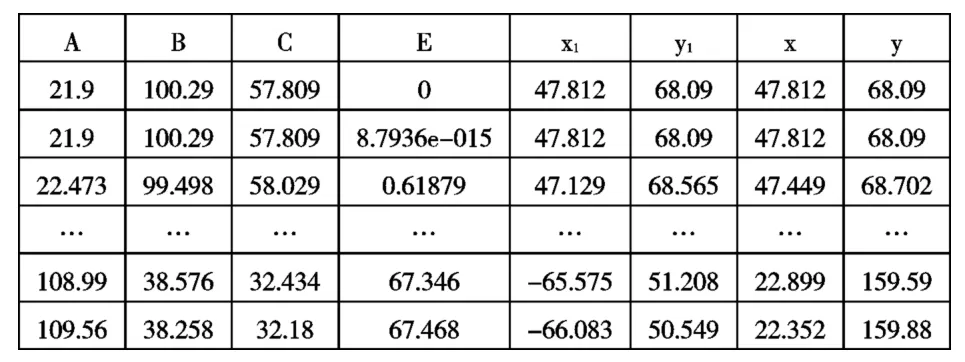
表2 参数值
3.3 更改E 角度信号源类型
我们更改图3 框图模型的E 角度信号源类型,将正弦信号更改为斜坡信号,建立新的框图程序,如图7。

图7 框图模型
在command window 窗口输入以下命令,得到E 角度以斜坡信号作为输入的限位器主臂曲线图8。
plot(simout(:,7),simout(:,8))
axis([-40 70 40 180])
axis equal
xlabel('INPUT x')
ylabel('Solved y')
grid on
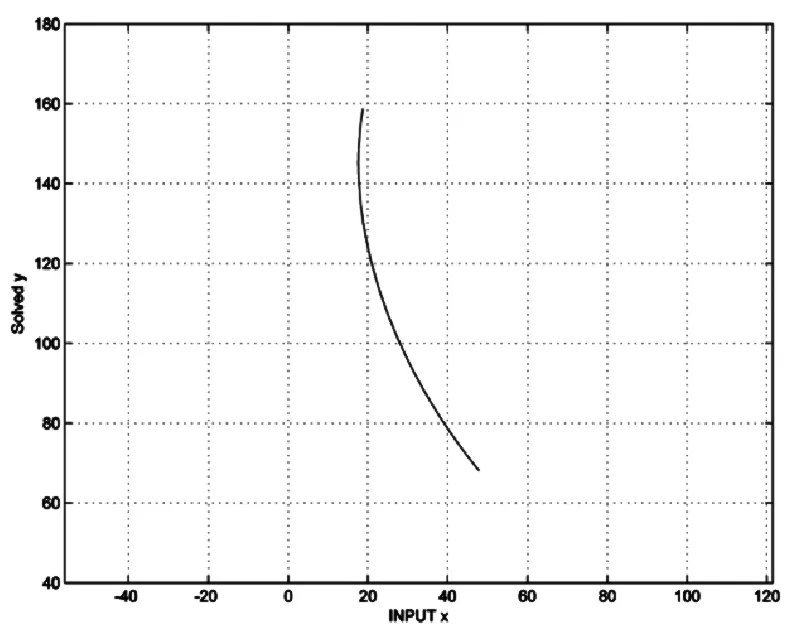
图8 x~y 斜坡信号主臂曲线图
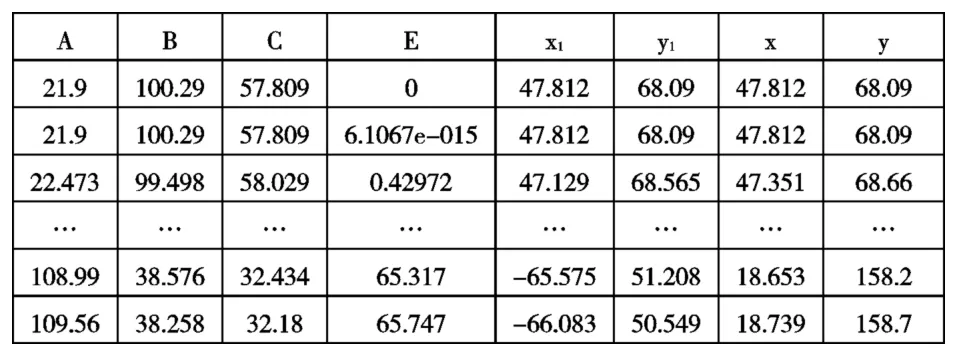
表3 参数值
通过查看矩阵simout 参数值表3,我们看到限位器主臂曲线(x,y)是从x 轴47.812 开始到18.739 结束。同样,调整斜坡信号的比例值也可以得到不同形状的限位器主臂曲线。
4 结论
应用数学软件Matlab/Simulink 编写的限位器主臂曲线程序,当知道车门旋转铰链中心点A,限位器旋转中心点B,以及限位器盒中心点C,三点布置位置和设计要求车门最大开启角度的情况下,可以快速准确地求解出车门限位器主臂曲线,并通过改变主臂曲线绕B 点旋转角度E 的输入信号参数,可调整主臂曲线的形状,避开车门内部玻璃升降器、车门内、外板等零件,以达到最终确定下一条满足设计意图的限位器主臂曲线。本文给予了这类设计问题建立了数学模型,借助计算机高效的运算效率提高了此类设计工作的效率。
猜你喜欢
装备制造技术(2023年8期)2023-10-24 07:35:58
中国特种设备安全(2023年2期)2023-03-16 11:09:08
机械工程与自动化(2021年6期)2022-01-18 03:02:08
数理化解题研究·高中版(2021年11期)2021-12-16 06:45:17
初中生学习指导·提升版(2021年3期)2021-09-10 07:22:44
汽车零部件(2021年2期)2021-03-05 01:38:56
汽车实用技术(2020年12期)2020-10-21 04:14:03
Chinese Chemical Letters(2019年12期)2020-01-14 07:54:30
中学生数理化·高一版(2018年4期)2018-05-08 09:52:00
广西科技大学学报(2016年4期)2016-11-21 09:34:28
