
桥、门式起重机起升高度限位器的配置
2023-03-16 11:09蒋元栋
中国特种设备安全 2023年2期
李 威 黄 斌 蒋元栋
(江苏省特种设备安全监督检验研究院苏州分院 苏州 215031)
起升高度限位器是防止起重机械起升机构取物装置冲顶的重要安全保护装置,其功能可靠与否将直接影响起重机械的安全运行。根据近年来特种设备事故统计和原因分析,在桥、门式起重机使用过程中,由于起升高度限位器配置不当、缺失、损坏和失效等原因引起的事故占比较高。为此,国家市场监督管理总局办公厅于2021年3月10日下发了《市场监管总局办公厅关于开展起重机械隐患排查治理工作的通知》(市监特设发〔2021〕16号,以下简称16号文)[1]。按照16号文要求,对于未配置传动式起升高度限位器的桥、门式起重机,应按时间节点要求再安装(加装)(以下统称加装)一套不同于原配置形式的起升高度限位器,以确保满足“双限位”装置的要求,达到提高设备本质安全之目的。以下笔者就常见的起升高度限位器形式、工作原理等,并结合工作中的实际问题谈一下对配置起升高度限位器的理解。
1 起升高度限位器的形式及其工作原理
1.1 传动式起升高度限位器
传动,即机械之间的动力传递。所谓起重机械的传动式起升高度限位器,首先,此类限位器内部为机械传动形式,通常有螺杆螺母传动式、蜗轮蜗杆传动式及齿轮传动式等。其次,限位器的传动端部件(如螺杆、蜗杆或传动轴等)与起重机起升机构的某一旋转部件(如卷筒轴等)之间通过联轴器、套装等方式直接刚性连接或通过齿轮、链轮链条传动机构等方式间接柔性连接,以此实现动力传递。下面简单介绍几种常见的钢丝绳卷扬式起升机构的传动式起升高度限位器。
●1.1.1 螺杆螺母传动式起升高度限位器
螺杆螺母传动式起升高度限位器(以下简称螺杆螺母式限位器)安装及构造图,见图1。

图1 螺杆螺母传动式起升高度限位器
该限位器的内部为螺杆螺母传动形式,螺杆与卷筒轴之间套装连接以始终实现卷筒与限位器之间的动力传递。具体工作原理分析如下:
当起升机构上升运行时,其卷筒轴带动螺杆螺母式限位器的螺杆并按图1(b)中的红色箭头方向转动,于是限位器的移动螺母在导杆的约束作用下向右侧移动。当吊具(如吊钩、抓斗等)到达上升极限位置时,固定在移动螺母上的螺栓碰触电气开关,于是电气开关动作并切断上升方向动力源,促使起升机构停止上升运行。
●1.1.2 蜗轮蜗杆传动式起升高度限位器
蜗轮蜗杆传动式起升高度限位器(以下简称蜗轮蜗杆式限位器)安装及构造图,见图2。

图2 蜗轮蜗杆传动式起升高度限位器
该限位器的内部为蜗轮蜗杆传动形式,蜗杆与卷筒轴之间套装连接以始终实现卷筒与限位器之间的动力传递。具体工作原理分析如下:
当起升机构上升运行时,其卷筒轴以一定方向(从图2(a)中红色箭头方向看为顺时针)转动并带动蜗轮蜗杆式限位器的蜗杆转动,这时限位器的蜗轮蜗杆机构按一定速比传动运转,同时蜗轮(在限位器内部)转动并带动蜗轮轴上的凸轮转动。当吊具到达上升极限位置时,凸轮碰触电气开关(图中4个电气开关,一般情况下2个控制上升方向,另外2个控制下降方向,具体按图设计接线),于是电气开关动作并切断上升方向动力源,促使起升机构停止上升运行。
●1.1.3 齿轮传动式起升高度限位器
齿轮传动式起升高度限位器(以下简称齿轮传动式限位器)外形及构造图,见图3。

图3 齿轮传动式起升高度限位器
该限位器的内部为齿轮传动形式,限位器上的齿轮与起升机构卷筒轴上的齿圈啮合传动(图中略),以始终实现卷筒与限位器之间的动力传递。具体工作原理分析如下:
起升机构工作时,卷筒轴转动并带动齿轮传动式限位器的内部齿轮减速机构按一定速比传动运转,同时限位器齿轮减速机构上的凸轮也随之转动。当吊具到达上升极限位置时,凸轮碰触电气开关,于是电气开关动作并切断上升方向动力源,促使起升机构停止上升运行。
1.2 非传动式起升高度限位器
若将上述分析中起升高度限位器的内部为机械传动形式,且起升机构工作时能始终实现卷筒与限位器之间动力传递的起升高度限位器定义为“传动式起升高度限位器”,那么不满足该定义的起升高度限位器则可称之为“非传动式起升高度限位器”。与传动式起升高度限位器相比,非传动式起升高度限位器最显著的特点是:当吊具未到达上升极限位置时,该限位器始终处于静止状态。下面简单介绍几种常见的钢丝绳卷扬式起升机构的非传动式起升高度限位器。
●1.2.1 断火式起升高度限位器
断火式起升高度限位器(以下简称断火式限位器)外形及安装图,见图4。

图4 断火式起升高度限位器
断火式限位器通常安装固定在起升电机上,其工作系统主要包括导绳器、推杆、撞块及断火式限位器4个功能部件。具体工作原理分析如下:
起升机构作上升方向运行时导绳器由左向右方向水平移动,当吊钩滑轮组接近上升极限位置时,导绳器开始碰触固定在推杆上的撞块并促使推杆缓慢向右侧移动,从而使推杆推动断火式限位器开始进入动作行程。当吊钩滑轮组再次上升一定距离(CD15-6D型电动葫芦约为600 mm)后,断火式限位器被推杆推动而完全动作并切断起升电机的两相动力电源(即断开两相火线,故称“断火”),于是起升机构停止上升运行。
●1.2.2 重锤式起升高度限位器
重锤式起升高度限位器(以下简称重锤式限位器)外形及安装图,见图5。

图5 重锤式起升高度限位器
该限位器由电气开关、重锤及细钢丝3个部件组成,电气开关通常固定在起升钢丝绳(静绳)上,重锤空套在起升钢丝绳(静绳)上并通过细钢丝与电气开关固定连接。具体工作原理分析如下:
当起升机构作上升方向运行且吊钩滑轮组接近上升极限位置时,吊钩滑轮组的外壳左侧上部开始碰触重锤并将其向上抬升,此时电气开关因细钢丝松弛便失去了重锤的拉力而复位,于是电气开关动作(其常开触头恢复断开状态)并切断上升方向动力源,促使起升机构停止上升运行。
●1.2.3 压板式起升高度限位器
压板式起升高度限位器(以下简称压板式限位器)外形及安装图,见图6。

图6 压板式起升高度限位器

图6 压板式起升高度限位器(续)
该限位器由电气开关、压板及U形螺栓等部分组成,限位器整体通过U形螺栓固定在起升钢丝绳(静绳)上。具体工作原理分析如下:
当起升机构作上升方向运行且吊钩滑轮组接近上升极限位置时,吊钩滑轮组的外壳顶部开始碰触压板并继续将其向上顶压呈水平状态,此时电气开关因受压板顶压作用而动作(其常闭触头断开)并切断上升方向动力源,促使起升机构停止上升运行。
2 起升高度限位器的配置
2.1 对16号文关于“双限位”要求的理解
16号文要求:对于未配置传动式起升高度限位器的桥、门式起重机,应按时间节点要求再加装一套不同于原配置形式的起升高度限位器,以确保满足“双限位”装置的要求,达到提高设备本质安全之目的。同时,可能考虑传动式起升高度限位器可靠性高、电气触头多、易实现电气控制的原因,未对已配置此类限位器的桥、门式起重机提出额外加装第二套限位器的要求。但值得注意的是,16号文提出了仅配置非传动式起升高度限位器时的数量和形式要求(即“双限位”装置要求),却未明确提及相应电气控制要求。笔者认为在提高起升高度限位可靠性方面,对电气控制的要求[2]是必不可少的。如果忽视电气控制要求,那么加装限位器的工作也有可能达不到预期效果。例如:若将2个限位器的电气触头串接在同一断路装置中,则当该断路装置发生因触头粘连等故障而导致通断功能失效时,起升高度限位将仍然失效[3](具体电气分析略)。因此,建议在起升高度限位的改进设计中参照GB/T 6067.1—2010《起重机械安全规程 第1部分:总则》[4]中9.2.1条关于起升高度限位器的规定予以执行。即:“起升机构均应装设起升高度限位器。当取物装置上升到设计规定的上极限位置时,应能立即切断起升动力源。在此极限位置的上方,还应留有足够的空余高度,以适应上升制动行程的要求。在特殊情况下,如吊运熔融金属,还应装设防止越程冲顶的第二级起升高度限位器,第二级起升高度限位器应分断更高一级的动力源。”同时,建议特检机构在开展相关检验[5-7]工作时能关注确认。
2.2 起升高度限位器形式选配
起升高度限位器形式多样,在实际加装过程中具体选配何种形式的限位器尤为关键。下面以目前广泛使用的CD型钢丝绳电动葫芦(原配置单一断火式限位器)为例,分析选配加装限位器的形式问题。
●2.2.1 加装重锤式限位器
CD型钢丝绳电动葫芦(原配置单一断火式限位器)加装重锤式限位器,见图7。
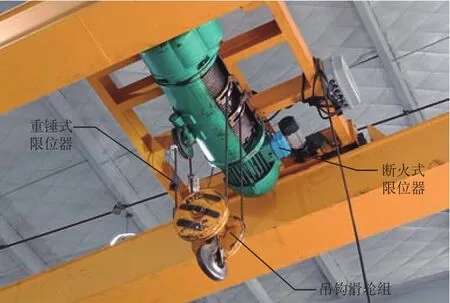
图7 加装重锤式起升高度限位器
在原配置单一断火式限位器的CD型钢丝绳电动葫芦上加装一套重锤式限位器,并将其作为第一级限位器(通常控制上升接触器线圈回路的电源),断火式限位器作为第二级限位器(控制起升电机的两相动力电源,其功能相当于电源刀开关)。具体动作过程及保护原理分析如下:
当起升机构作上升方向运行且吊钩滑轮组到达第一起升高度设定位置时,第一级重锤式限位器动作并间接通过上升接触器切断起升电机的三相动力电源,促使起升机构停止上升运行。若第一级重锤式限位器失效(包括上升接触器主触头粘连等原因)导致吊钩滑轮组继续上升到达极限位置时,第二级断火式限位器动作并直接切断起升电机的两相动力电源,此时起升机构停止上升运行,从而防止吊钩滑轮组冲顶。
●2.2.2 加装压板式限位器
CD型钢丝绳电动葫芦(原配置单一断火式限位器)加装压板式限位器,见图8。

图8 加装压板式起升高度限位器
在原配置单一断火式限位器的CD型钢丝绳电动葫芦上加装一套压板式限位器,并将其作为第一级限位器,断火式限位器作为第二级限位器。对比图7与图8加装限位器的情况,压板式限位器与重锤式限位器的电气控制原理一致,所不同的是压板式限位器整体安装固定在起升钢丝绳(静绳)上且位置相对靠下,而重锤式限位器的电气开关安装固定在接近起升钢丝绳(静绳)的尾端且重锤空套在钢丝绳上。由此从图8加装情况来看,当第一级压板式限位器失效导致吊钩滑轮组继续上升且未能到达第二级断火式限位器动作位置时(从设计考虑,不同等级的限位器之间应保留一定的动作距离),压板式限位器的部件(包括电气开关、U形螺栓等)就已经卡入滑轮组,这时有可能造成滑轮破损、滑轮罩壳开裂及起升钢丝绳折弯等破坏性后果,因而增加了事故隐患和风险点。反观图7中的加装情况,若第一级重锤式限位器失效导致吊钩滑轮组继续上升时,重锤能沿起升钢丝绳(静绳)向上滑动提升,此时吊钩滑轮组及起升钢丝绳等均不会受损;当到达上升极限位置时,第二级断火式限位器动作并促使起升机构停止上升运行,从而防止吊钩滑轮组冲顶。
● 2.2.3 选配建议
基于以上分析比较,建议对原配置为单一断火式限位器的电动葫芦,加装重锤式限位器为宜;同时其他仅配置单一非传动式起升高度限位器的起升机构也应根据实际情况,因地制宜选配加装相应形式的限位器。
2.3 对环链电动葫芦起升高度限位要求的探讨
以环链电动葫芦作为起升机构的桥、门式起重机也较为常见,尤其以桥式起重机居多。部分环链电动葫芦产品设计采用电气+机械方式的起升高度限位来实现起升机构吊具防冲顶功能,例如KITO、DEMAG及KONECRANES等公司相关型号的环链电动葫芦。下面以KITO公司ER2系列环链电动葫芦为例做相应分析。
●2.3.1 杠杆式起升高度限位器
KITO公司ER2系列环链电动葫芦的杠杆式起升高度限位器(以下简称杠杆式限位器),见图9。

图9 杠杆式起升高度限位器
该杠杆式限位器为电气式、非传动式起升高度限位器,其工作原理类似于前述的压板式限位器。当吊具到达上升极限位置时,通过吊具上部的缓冲弹簧或者衬垫将限位杆向上方顶压,于是安装在葫芦本体内部的电气开关动作并切断上升方向动力源,促使起升机构停止上升运行,从而防止吊具冲顶。
●2.3.2 摩擦离合器
KITO公司ER2系列环链电动葫芦的内部构造图及摩擦离合器图,分别见图10和图11。

图10 ER2系列环链电动葫芦内部构造图

图11 摩擦离合器
该摩擦离合器为机械式,亦称安全离合器,它兼具超载保护功能。按照生产单位的产品设计技术文件说明,当吊具到达上升极限位置时,若上述杠杆式限位器失效等原因导致电动葫芦可能发生过卷时,吊具紧贴在葫芦本体底部外壳产生较大的力致使摩擦离合器机构空转,此时的提升动力便不能带动负载滑轮转动,即吊具无法继续上升,从而起到防止吊具冲顶、保护电机以及机构的作用。
按照JB/T 5317—2016《环链电动葫芦》[8]中5.4.1条规定:“环链葫芦应具有行程限位功能,可采用机械或电气的方法。当起重吊钩上升或下降至极限位置或设定的位置时,行程限位功能应自动停止起重吊钩在原方向上的运动,但并不影响起重吊钩向相反方向的运动。”由此可见,将上述机械式摩擦离合器作为起升高度限位器的一种形式,符合JB/T 5317—2016的要求,但并不符合16号文的要求,因为16号文中提及的限位器均为电气式限位。
笔者认为,若环链电动葫芦设置了符合JB/T 5317—2016要求的能够防止起升机构冲顶的机械式摩擦离合器,则应当等效作为起升高度限位器的一种予以考虑,但更有待于商榷。
3 结束语
总局办公厅16号文对加强起重机械使用安全管理具有重要推动作用。生产单位应考虑不断提高起重机械本质安全,特检机构应对起升高度限位器的符合性作出确认,使用单位应做好起重机械日常检查与维护保养[9]工作,从而确保起重机械安全运行。
猜你喜欢
汽车零部件(2022年7期)2022-08-03
初中生学习指导·中考版(2022年4期)2022-05-12
湖南电力(2021年4期)2021-11-05
电子乐园·上旬刊(2021年8期)2021-05-16
汽车零部件(2021年2期)2021-03-05
中国特种设备安全(2021年9期)2021-03-02
汽车实用技术(2020年12期)2020-10-21
初中生学习指导·提升版(2020年5期)2020-09-10
广西科技大学学报(2016年4期)2016-11-21
石油化工建设(2015年2期)2015-12-01
