
机器人甲状腺切除手术学习曲线:单个术者的研究
2019-09-06 08:39孙寒星高浩基应夏洋黄海燕李勤裕邱伟华严佶祺
外科理论与实践 2019年4期
孙寒星, 高浩基, 应夏洋, 黄海燕, 吕 恬, 陈 曦, 李勤裕, 邱伟华, 严佶祺
(上海交通大学医学院附属瑞金医院外科,上海 200025)
机器人外科系统应用于甲状腺手术,最早由韩国延世大学Kang等[1]在2007年完成,至今已超过10年。相对于传统的开放手术,机器人手术具有瘢痕隐匿的特点。相比腔镜手术,机器人手术具有三维的视野、灵活的机械关节和精细的操作臂活动度等优势。
本院于2009年引入机器人手术。自2015年5月开展机器人甲状腺手术以来,至今完成机器人甲状腺、甲状旁腺切除、颈侧区淋巴结清扫400余例。全国范围内,同期常规开展这一术式的医院不足10家,超过400例的为数甚少。为探索机器人甲状腺手术的学习曲线,推广这一技术,本研究纳入最初200例双侧腋下乳晕入路(bilateral axillo-breast approach,BABA)机器人手术,进行分析。
资料与方法
一、病例选择
取2015年5月至2017年8月本院行机器人甲状腺切除手术的200例病人。术前均行完善的甲状腺B超及CT检查。手术指征如下:①B超检查提示甲状腺超声影像分级 (thyroid imaging reporting and data system,TI-RADS)3 级,最大径>4 cm;②肿块穿刺细胞学检查为分化型甲状腺癌,最大径<3 cm,且局限于甲状腺内,无周围器官侵犯;③B超检查提示TI-RADS分级4C或5类,最大径<3 cm,局限于甲状腺内,无周围器官侵犯,且病人拒绝穿刺;④术前检查提示无颈侧方(Ⅱ、Ⅲ、Ⅳ、Ⅴ区)或Ⅶ区淋巴结转移或远处转移。手术方式为甲状腺腺叶切除或甲状腺全切除。如为恶性肿瘤,加行中央组淋巴结清扫。所有手术均由同一医师主刀,同组医师辅助完成。在开展机器人手术前,医师已积累了数千例开放甲状腺手术的经验,且短期观摩学习了机器人手术技术。
二、手术过程
手术前,常规在女性病人双侧乳房下黏贴弹力绑带,将乳房上推,乳晕切口抬高,使颈部与镜头臂成角更大,减小手术盲区,扩大手术野。手术流程:穿刺皮下隧道,颈前区建立气腔(8 mmHg),游离皮瓣,固定操作臂,操作台上完成甲状腺切除及淋巴结清扫,撤离床旁机械臂系统,缝合皮肤。
具体手术过程如下。皮瓣游离下界至胸骨切迹,上界约至甲状软骨切迹水平。离断峡部后,以气管为导向,沿表面初步游离甲状腺。Cadiere钳推挡颈前肌群,松解甲状腺外侧界面,直至完全显露上极。将腺体自外向内提拉,游离其后方脂肪结缔组织及环甲间隙,离断上极。辨识甲状旁腺,保留腺体与其血供。游离甲状腺下极。于Zuckerkandl结节内侧、气管外侧疏松组织处钝性分离,寻找喉返神经,明确神经走行。钝性分离神经与腺体间隙,完整显露至入喉处。为避免热损伤,在暴露、保护喉返神经时,选择组织接触面积更小的电剪刀来完成精细解剖,远离神经3 mm以上时可予适当电凝。继在神经内侧,沿气管与甲状腺包膜间隙,锐性分离腺体,直至从气管表面切下。最后清扫中央组淋巴结。首先用电剪刀将气管前淋巴结向患侧游离。随后,钝性分离出外侧胸腺与中央区脂肪组织间隙,向对侧牵拉淋巴结。找到喉返神经,将其与淋巴结精细分离,完成神经全程显露。待神经完全从淋巴结组织分离后,再以超声刀自底部完整切除淋巴脂肪组织,完成清扫。另外,术中如有少量出血,可用小纱布压迫控制。操作尽量选择生理解剖层面,以求术野清晰,出血少。随着技术稳定且手术步骤固化,目前约2/3病例可做到术中无需纱布填入擦拭术野。
三、统计学处理
采用统计软件SPSS 22.0分析数据。计量资料用x±s表示,均数间比较应用t检验。三组间基本临床资料比较应用单因素方差分析 (One Way Anova)。率的比较用卡方检验。P<0.05为差异有统计学意义。

图1 手术学习曲线
结 果
一、学习曲线
分析了最初200例机器人手术。通过移动平均(moving average,MA)的方法,弱化变量干扰,对手术时间加以分析,突出其变化趋势(见图1)。其中10台手术为一平均组(移动平均项数为10)。随着机器人甲状腺切除手术量的累积,手术时间在明显降低后趋于平稳,进入平台期。约35例处,手术时间有明显缩短的趋势,维持在110~130 min;约80例处,又有明显缩短的趋势,维持在80~100 min保持稳定。可见初步学习曲线为35例,在积累至80例手术后,趋于稳定。
二、临床数据
根据对MA手术时间的分析,将接受甲状腺切除或加中央组淋巴结清扫的病例分为A组(前35例),B组 45例(第 36~80例)和 C组 120例(第 81~200例)。对各组临床基本资料进行比较(见表1)。三组性别、年龄差异无统计学意义。B和C组术后住院时间及术中出血量明显少于A组。其中,出血量是依据术中填塞使用纱布数量,间接计算。单块纱布以5 mL血量计。三组间手术时间递减,从最初的 (145.6±42.6)min,逐渐下降到中期平台(116.2±29.2) min,最终稳定于平台期(88.2±26.1)min,组间差异有显著统计学意义。这证实了之前通过手术时间曲线所做的推断。三组间肿瘤最大径有差异,但无统计学意义。值得注意的是,三组间单侧与双侧腺叶切除的构成比例差异有统计学意义,C组(85∶35)中甲状腺未全切与全切的比例远高于A(30∶5)、B(40∶5)两组。按常理,甲状腺全切除的手术时间要长于单侧切除。然而,C组的手术时间明显低于其他两组。三组间肿瘤良、恶性比例差异无统计学意义(P=0.240)。虽然恶性肿瘤手术相比于良性结节,增加淋巴结清扫的时间,但对于三组平均手术时间及手术时间变化趋势,这一影响有限,因此仍可按此分组合并计算。恶性肿瘤术中淋巴结清扫数量在组间依次递增,A组 (2.7±1.2)枚,B组(3.9±3.7)枚,C 组(5.6±3.9)枚,差异有统计学意义,提示淋巴结清扫的程度可能有赖于手术经验的积累(见表2)。术后短期并发症发生主要包括声音嘶哑、低血钙、术后出血和术区积液等(见表3)。其中,声音嘶哑在各组中均有个例,多为暂时性,仅1例永久性。同样,在行甲状腺全切除的病例中,术后低血钙多为暂时性,但有1例为永久性。无术后出血病例。术后积液各组均仅有1~2例。
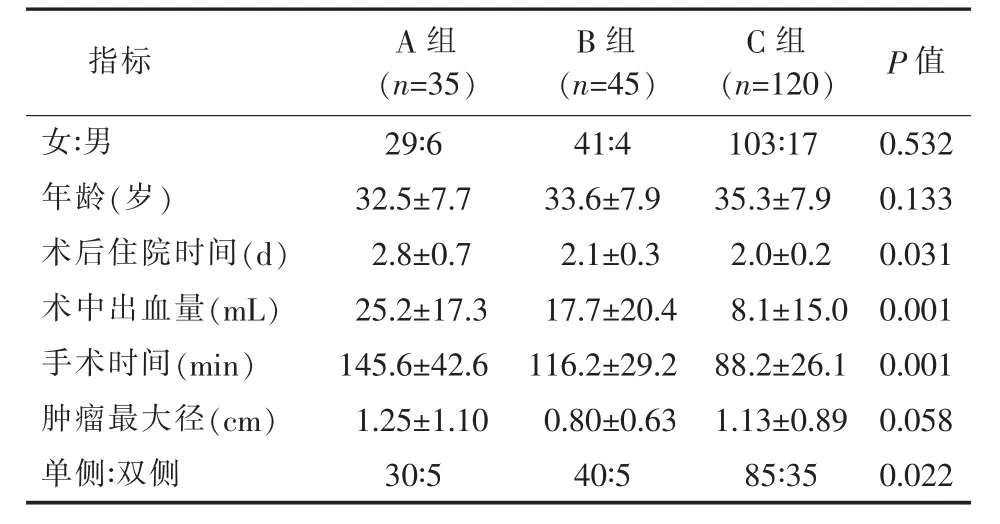
表1 临床资料
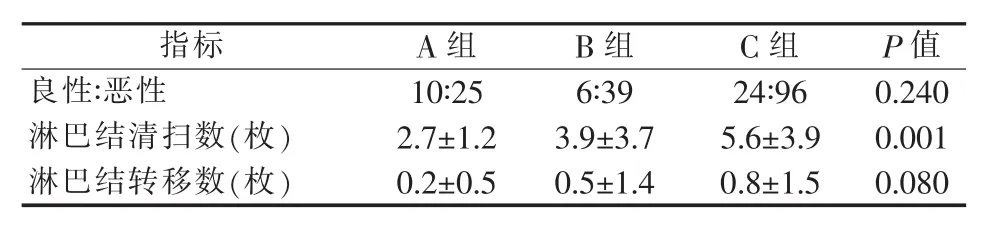
表2 淋巴结清扫
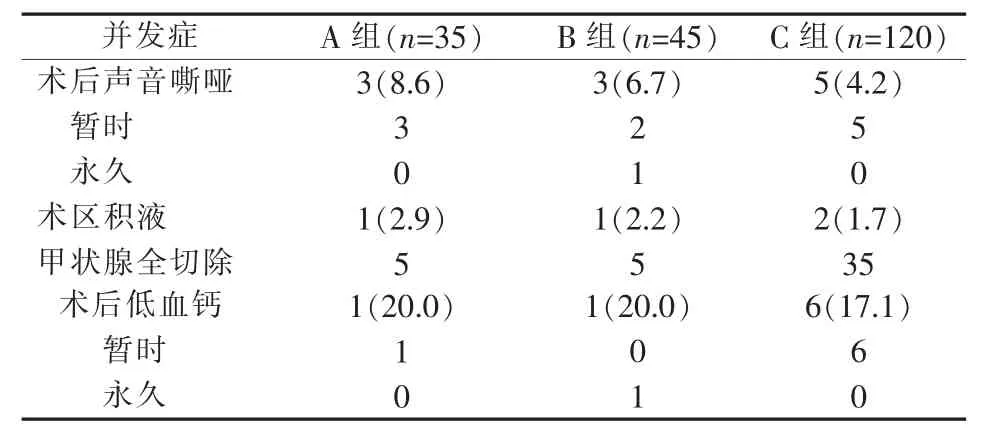
表3 术后短期并发症[n(%)]
讨 论
机器人能提供术者更清晰的视野、更灵活的操作体验以及更精细的解剖视角。尽管如此,机器人甲状腺手术的推广仍存在一系列顾虑,包括昂贵的手术费用、较高的准入门槛、不确定的学习周期,及对手术安全性、根治性的担忧等因素。
一、学习曲线
目前,机器人甲状腺手术已在国际上多个中心广泛开展。对于手术技术的学习曲线,多有报道。Lee等[2]的多中心研究表明,对于富有腔镜经验的术者,度过全甲状腺切除及单侧腺叶切除的学习曲线,分别需50例及40例的机器人手术实践。Kim等[3]根据单个术者经验报道,对于无腔镜经验的术者,度过机器人甲状腺切除的学习曲线需40例。
本研究发现机器人甲状腺切除术的学习曲线为35例。在手术量达到80例时,手术效率将进一步提升,并维持手术时间稳定在(88.2±26.1)min。值得一提的是,前15例手术在半年时间内完成,第二年完成68例,剩余117例在9个月内完成,提示手术频率不断提高。结合术者自身体会,对手术熟练度的提升帮助较大。
二、临床数据
本研究200例,病理检查结果为恶性160例。其中T1期156例,T2期4例,肿瘤直径均<3 cm。均行中央组淋巴结清扫,为(4.7±4.0)枚。共86例见淋巴结转移,阳性率53.8%。以笔者的体会,淋巴结清扫数量与术者手术经验密不可分。本研究三组间淋巴结清扫数的显著差异,证实了这一点。Kim等[3]在报道中也提出相似的观点。
除淋巴结清扫,术中对甲状旁腺、胸腺的辨认及保护,也与术者的经验相关。本研究发现,前80例中,有10例(12.5%)标本中找到甲状旁腺组织,3例(3.8%)有胸腺组织。后120例中,仅有8例(6.7%)有甲状旁腺组织,2例(1.7%)有胸腺组织。
术后近期并发症发生方面,接受双侧腺体全切除的病例,共8例发生术后低血钙。其中7例通过静脉或口服补钙,血钙及甲状旁腺素(parathyroid hormone,PTH)水平短时间恢复正常。另1例,术后近1年,连续复查PTH均明显偏低。11例出现术后声音嘶哑。暂时性病例基本在1~2个月内恢复。另有1例,术后声音嘶哑持续6个月以上,仍未完全恢复。术中发现该病人肿瘤侵犯背侧包膜,紧贴神经。术中为了将肿瘤从神经表面分离,耗时良久,不排除对神经主干及其分支造成不可逆的损伤。另4例出现术后甲状腺术区积液,予以穿刺抽液引流。所引出液体均呈浆液性,考虑可能为淋巴液积聚。结合本研究数据和术者经验,术后声音嘶哑、低血钙与术中神经、甲状旁腺的识别和保护密不可分。该术式开展早期,术后并发症发生率较高,随着学习曲线的推移,并发症发生率呈下降趋势。
三、机器人甲状腺手术的影响因素
Lee等[2]通过多中心研究,提出度过机器人全甲状腺切除及单侧腺叶切除的学习曲线,分别需50例及40例手术实践。这一数据与本研究结果有差异。手术入路不同可能是数据差异的原因之一。相比于单侧腋下入路 (transaxillary approach,TA),BABA的观察角度更符合解剖习惯,手术操作空间更大,操作钳不会相互干扰。尤其是对于对侧甲状腺的切除,TA条件下,操作空间受到气管的限制,增加手术难度,可能导致学习曲线的延长。虽然BABA需要的trocar数量多,但笔者在实践中发现,长穿刺隧道、小截面积的条件下,出血风险并未明显增加。
目前,机器人甲状腺手术的常见入路,除TA、BABA外,还包括耳后入路(retroauricular approach,RA)。经RA机器人手术较少报道。Kandil等[4]的初步经验为单侧甲状腺切除手术时间约145 min,合并颈部提拉术时,约156 min。同样的术式,Mohamed等[5]报道的手术时间约115 min。
Song等[6]研究机器人甲状腺手术时间的影响因素,认为体质量指数和淋巴结清扫是影响手术时间的重要因素。肿瘤大小对手术时间影响并不显著。就笔者体会,肿瘤体积大时,手术操作的空间相对减小,会对牵拉和暴露造成一定的难度。过度的牵拉和频繁的翻动,易使腺体出血。若无法明确出血位置并及时止血,将影响手术视野,需额外花费时间清理术野。因此,对于体积较大的肿瘤,在Zucherkandl结节内侧找到神经后,以神经为引导,自下向上突破,游离腺体,可能是较合适的方法。
在机器人手术中,术者牵拉或夹持组织,缺少“力反馈”。对组织牵拉、夹持程度的判断,只能通过画面中组织的变形程度,也就是“视觉力反馈”。这一改变,在手术学习之初,术者可能不太适应。学习曲线初期的A组病例,出血量显著高于后两组,证实了这一点。随着手术经验的积累,在逐渐适应该特殊力反馈后,术者能通过组织的形变程度,准确判断组织受力情况,及时做出调整,避免误伤。这能提升手术的安全性和流畅度,缩短手术时间。
四、机器人手术与腔镜手术的比较
目前,国内报道的经BABA腔镜甲状腺切除术的学习曲线介于20~60例[7-10]。各研究组间差异较大。Lee等[11]对腔镜下TA和RA比较后认为,RA的手术时间及学习曲线更短,其学习曲线为50例,而TA为80~90例。腔镜手术在微创的同时,费用易被接受,适于推广,但也有不足之处。
与腔镜甲状腺手术相比,机器人手术有特定优势。这一点,相关文献已有报道[12]。首先,操作钳的多关节活动系统比手指关节更灵活,能轻易提拉靠近镜头侧位置较深的淋巴脂肪组织。同时以第二关节,推挡气管、腺体等邻近结构,利于清扫。Lee等[13]的研究认为,机器人手术解决了普通腔镜甲状腺手术的器械限制,淋巴结清扫数量优于普通腔镜。其次,震颤滤过系统过滤掉操作者手部的颤动,利于神经周围的精细解剖。最后,机器人手术中术者同时控制3把操作钳,通过其中2把“对抗”牵拉,稳定地暴露操作部位,避免助手配合过程中的意外。操作中,较合理的方式是保持“牵拉平衡”。通过不断微调,使2把钳子始终扩展出近圆形的暴露区域,保证暴露面积最大化,同时将操作处置入区域中心,以有效减少误伤。
本研究表明,对于已有丰富甲状腺手术经验的外科医师,具备开展机器人甲状腺手术的可能性。机器人甲状腺切除手术,需约35例手术积累,来度过学习曲线。通过约80例手术积累,将达到稳定和高效。
猜你喜欢
中华骨与关节外科杂志(2022年1期)2022-08-31
天津医科大学学报(2021年4期)2021-08-21
心电与循环(2021年1期)2021-02-05
——扶镜手
腹腔镜外科杂志(2020年8期)2020-12-13
文苑·感悟(2019年12期)2019-12-23
养生保健指南(2019年11期)2019-12-17
文苑(2019年23期)2019-12-05
读写月报(语文教育版)(2019年12期)2019-09-10
读者·校园版(2019年17期)2019-08-13
恋爱婚姻家庭·养生版(2017年5期)2017-05-04
