
野 外 巡 检 机 器 人 的 控 制 器
2019-09-03 11:33胡秀敏何志琴杨睿婉
实验室研究与探索 2019年8期
胡秀敏, 何志琴, 钞 凡, 杨睿婉
(贵州大学 电气工程学院, 贵阳 550025)
0 引 言
在20世纪80年代,在日本、美国等西方国家对巡检机器人的相关研究不断展开[1-2]。经过不断研究,国外已有一定的巡检机器人技术。在1999年,国内开始研究巡检机器人,到目前为止,巡检机器人在工业、快递行业都有广泛应用。
据不完全统计,有20多家制造商都在开发机器人[3-6],而机器人最重要的模块是运动控制器。当巡检机器人在有坡度及转角时,会出现速度缓慢、运行不够平稳等,本文基于此情况对控制器进行研究。
1 控制器设计
1.1 控制器主要功能
控制器分为横向控制和纵向控制两种,分别控制机器人的运动速度与转向。其控制系统结构见图1。要使巡检机器人在山地环境中,在保证一定负载和自发性情况下,稳定有效完成巡视检查工作。须使控制器的后轮对电机进行控制,通过调整电机速度,完成对机器人速度的控制。该设计具有以下特点:
(1) 满足安装方便。巡检车体有一定的大小和承重范围,所以控制器的尺寸和重量要尽可能小;
(2) 要有一定实时性。在后轮驱动且前轮实现速度差的过程中,耗时要尽量小;

图1 控制系统结构图
(3) 具有独立性。各部分硬件模块化,能实现扩展,便于后续相应功能调整;
(4) 具有直观性。为了使系统调试与监控更加方便,设计良好的交互界面;
(5) 具有抗干扰性。由于实际运行道路崎岖,应考虑抗干扰能力;
(6) 具有自发性。使用电磁传感器规划路线,机器人能自发巡检;
(7) 具有便捷性。为了巡检方便和安全,使用蓄电池提供动力。
(8) 具有容错性。能及时自动纠正运行中的路径偏差。
1.2 自适应PI控制器设计
为了提高系统的速度环的抗干扰能力,在转速环采用自适应模糊PI调节器的闭环策略。自适应模糊PI控制器原理如图2所示。自适应模糊PI控制的基本思想是按照专家经验,找出比例(Kp)、积分(Ki)、误差e以及误差的变化率ec四者之间的关系。PI参数应该满足下面规则[7-9]:
(1) 在系统刚开始运行时候,误差e的绝对值比较大,为了使系统能快速响应,且保证消除积分饱和影响,则KP此时的值很大,同时,要控制超调量的干扰,所以Ki等于零;
(2) 在系统进入稳定状态的前一个时间段,此时误差的绝对值大约是误差最大值的一半,考虑到系统响应速度以及超调量大小,要保证Ki的值在一定范围里,尽可能小,但也不能太小,尽量居中;
(3) 在系统即将进入到稳定状态时候,这个时候误差已经很小了,为了使系统稳定运行,且保持良好的响应速度与抗干扰能力,要适当增加Kp、Ki的值。
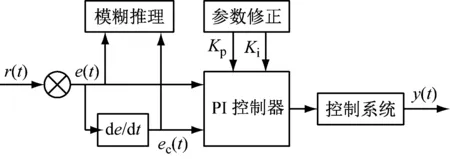
图2 自适应模糊PI控制器原理图
模糊子集设定为{NB,NM,NS,ZO,PS,PM,PB},其中,NB表示负大、NM表示负中、NS表示负小,ZO表示零,PS表示正大、PM表示正中、PB表示正小。模糊论域设定为[-3,-2,-1,0,1,2,3]。根据PI控制器的工作原理和以上控制规则就可以设计出模糊控制的规则表,见表1、2。
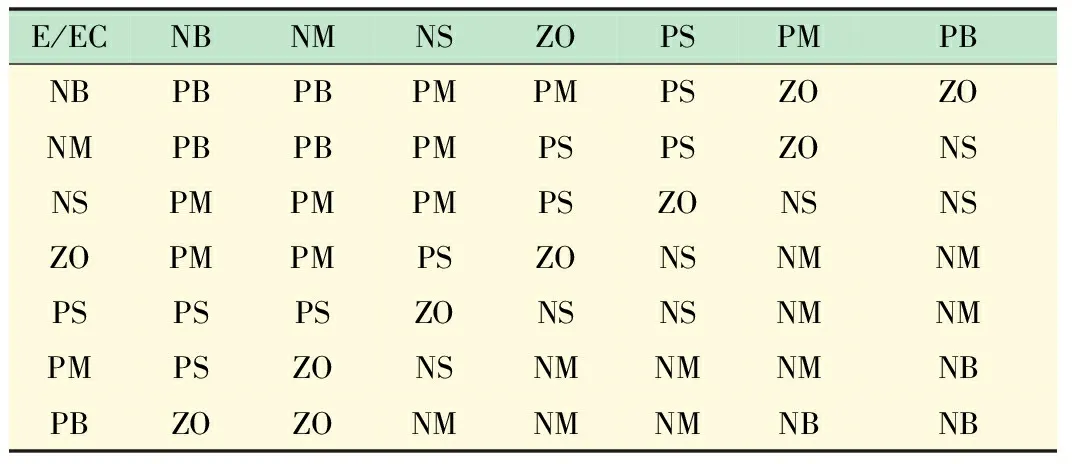
表1 Kp模糊控制规则表
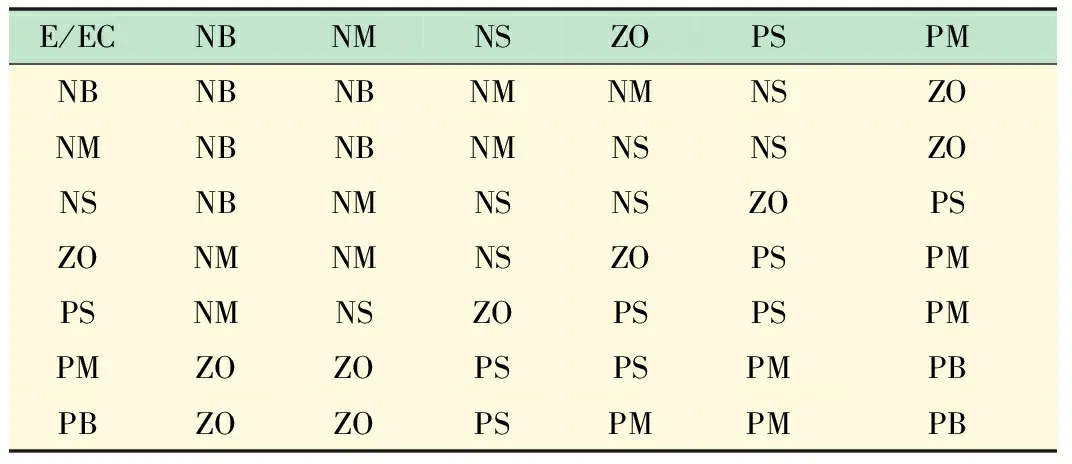
表2 Ki模糊控制规则表
1.3 模块化设计
1.3.1 硬件模块化
巡检机器人运动控制系统硬件由5大部分构成,即MK60DN512ZVLQ10、电磁、速度控制、动力电源和驱动系统算箅模块。各个部分分别完成了主要数据处理、路径规划、差速检测反馈、提供电源、动力驱动功能[10-12]。硬件框图如图3所示。
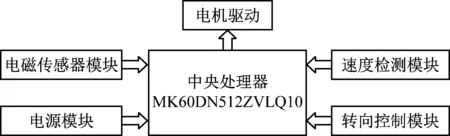
图3 硬件框图
1.3.2 软件模块化
巡检机器人系统软件根据功能分成了4个部分,主要是电磁传感器部分、速度控制部分、转向实现部分、车体保护部分[13-16]。软件整体框架图如图4所示。
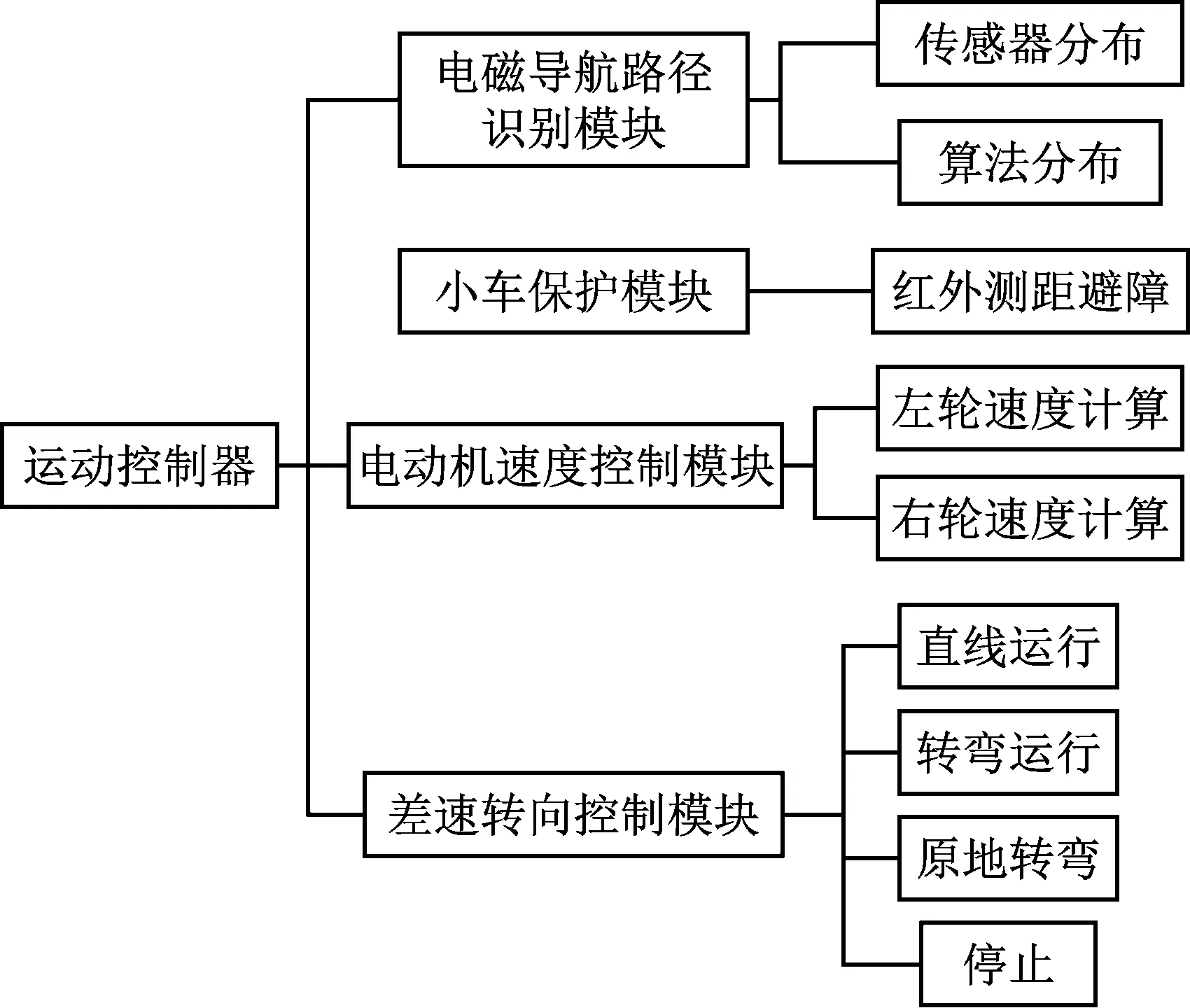
图4 软件整体框架图
2 真结果分析
2.1 前轮差速仿真
当输入量角度δ为斜坡函数,这里取δ=15t进行仿真实验。车轮速度变化如图5所示,其中,v2、v1是前侧左右轮速度,v3、v4是后侧左右轮速度。
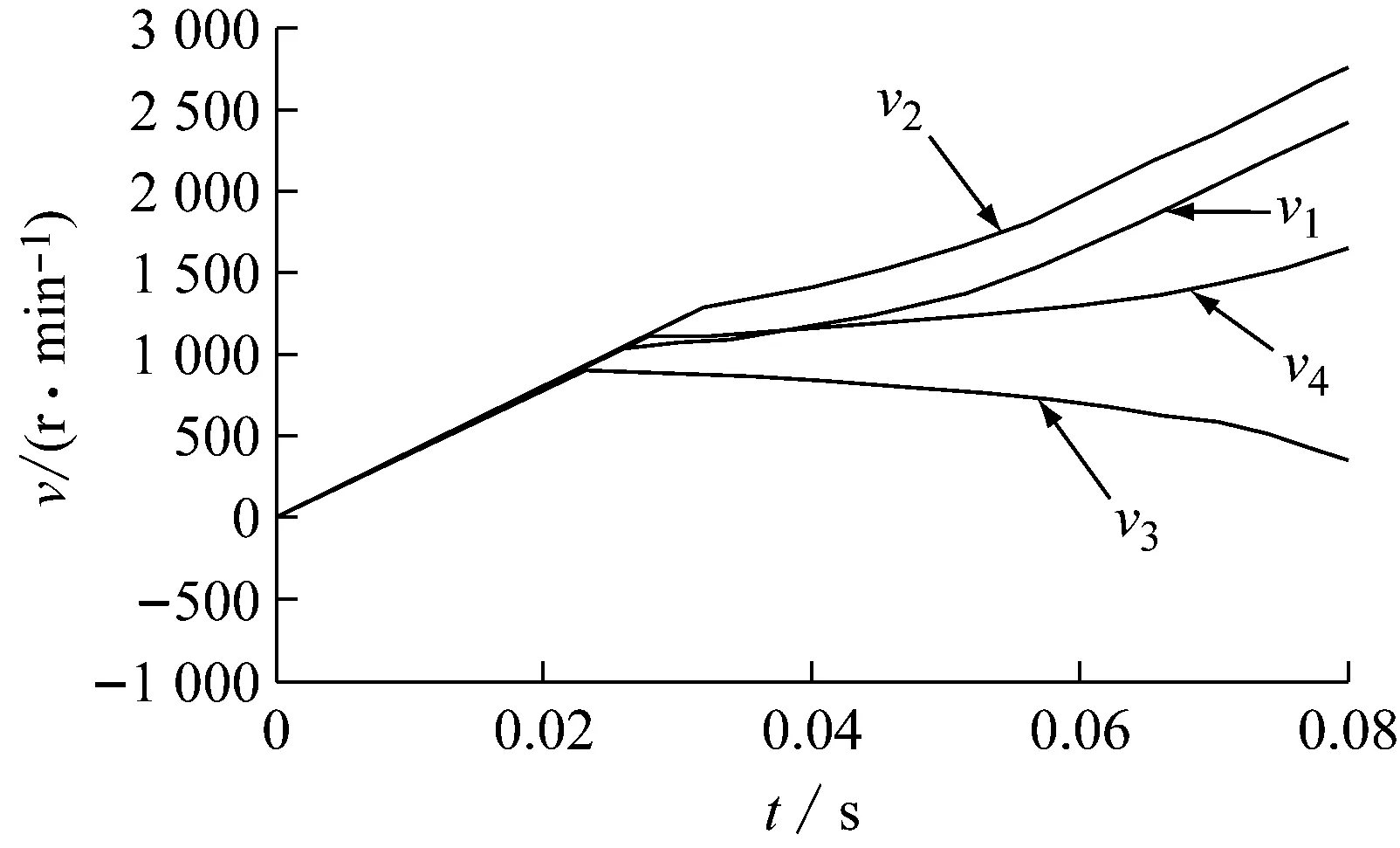
图5 4车轮速度变化
由图5可知,随着时间增加,v2、v1、v4逐渐增大,v3逐渐减小,但v4增加比较缓慢,这是由于随着δ角的增加,巡检车的转向半径越来越小,左右驱动轮间的差值越来越大才能满足转向需求。
这个时候,对相应的左边和右边调速系统的相电流、转矩和绕组反电动势仿真波形如图6所示。
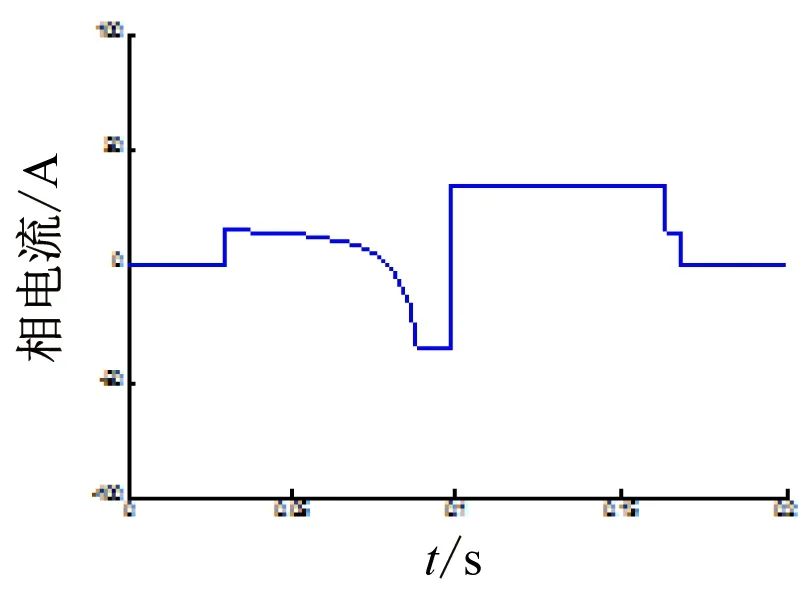
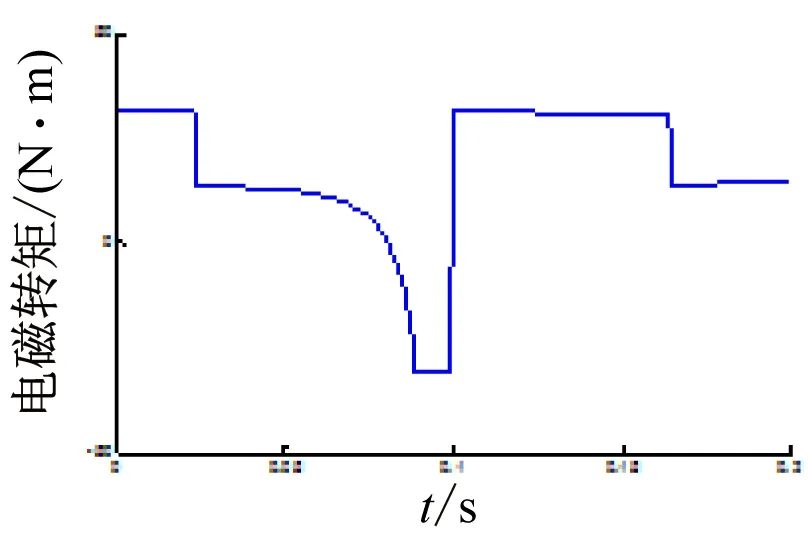
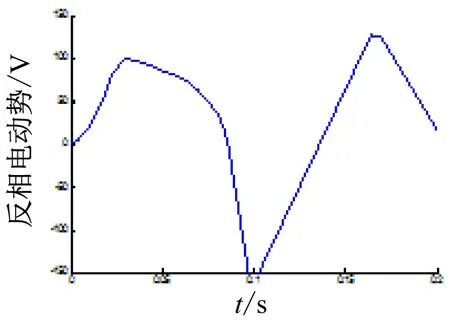
从仿真图形中可以看出,在起始阶段,左边和右边的相电流都是大于零的值,这是因为在开始阶段,左右两边驱动轮的速度都是在逐渐增大的。在时间为25 ms时候,左边驱动轮的相电流以及电磁转矩开始不断减小,右边的驱动轮则相反,相电流以及电磁转矩开始增加,左右轮之间速度差值越来越大,达到了转向的需求。
2.2 自适应PI控制仿真
速度环采用自适应模糊PI控制,输入为速度偏差值、偏差变化值。自适应PI控制下转矩仿真如图7所示。

图7 自适应 PI 控制下转矩曲线
转速仿真如图8所示,在时间为0.2 s时,突然增加2 N·m的负载,如图9所示,自适应PI控制器能及时恢复平衡稳定。由图 8、9可知,在某一时刻突然增加负载,自适应模糊PI控制能立即响应,维持稳定,具有更好的抗干扰能力,符合本设计的要求。
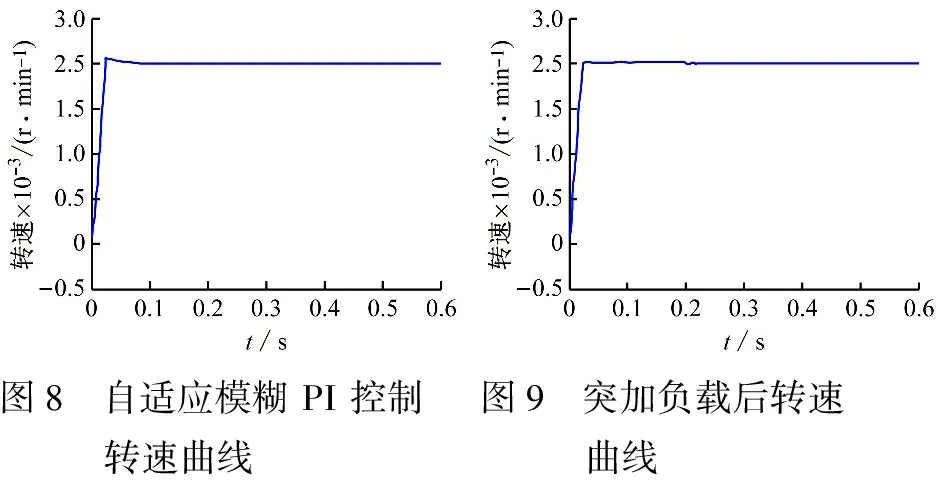
图8 自适应模糊 PI 控制 转速曲线图9 突加负载后转速 曲线
3 实验测试
本系统的测试在室内环境下进行。具体巡检车调试平台如图10所示。

图10 巡检车调试平台
选择半径分别为1 m、3 m进行测试,测试结果如图11、12所示。由图11、12可见,如果巡检机器人的速度越小,在转向时,误差就小,反之亦然。但误差是在一定小范围,不影响系统行径,能满足性能要求。
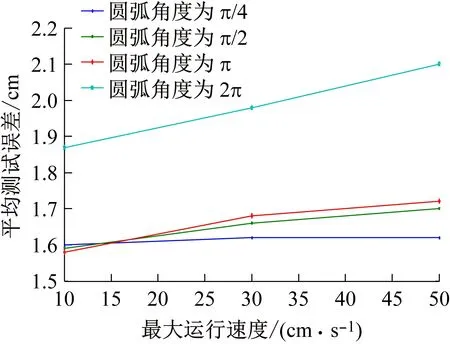
图11 圆弧半径1 m时速度与平均测试误差关系
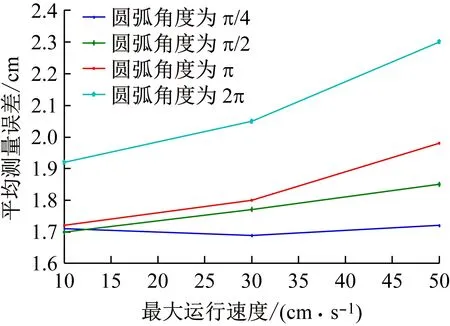
图12 圆弧半径3 m时速度与平均误差关系
4 结 语
对于运行在道路崎岖、环境恶劣中的巡检机器人,根据其具体性能要求,在经典四车轮模型基础上,使用双后轮驱动,前轮实现转速差,实现巡检机器人的稳定运行。在MATLAB平台上进行了仿真,并在模拟车体平台上进行了测试,测试结果表明,本文设计的差速分配方案能满足巡检机器人的性能指标要求。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
电机与控制学报(2022年6期)2022-07-15
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
微电机(2022年1期)2022-03-21
中国新技术新产品(2020年4期)2020-05-05
科技创新导报(2016年27期)2017-03-14
通信电源技术(2016年1期)2016-04-16
