全驱动AUV系统路径跟踪设计与实现
2019-09-02 12:19姚金艺曾庆军周启润朱志宇包灵卉
水下无人系统学报 2019年4期
姚金艺, 曾庆军, 周启润, 朱志宇, 包灵卉
全驱动AUV系统路径跟踪设计与实现
姚金艺, 曾庆军, 周启润, 朱志宇, 包灵卉
(江苏科技大学 电子信息学院, 江苏 镇江, 212003)
针对全驱动自主水下航行器(AUV)水下搜救和回收等应用需求, 提出一种基于全球定位系统(GPS)、多普勒计程仪(DVL)、光纤惯导和深度计及航路点跟踪的AUV路径跟踪控制系统。结合自主研发的“探海Ι型”AUV样机, 介绍了AUV分布式系统组成结构、基于MOOS库的软件开发设计以及基于PC104总线架构开发的硬件设计, 并针对AUV系统的路径跟踪功能, 阐述了航路点跟踪原理及以GPS、DVL、光纤惯导和深度计为基础的导航算法, 并设计了比例-积分-微分(PID)路径跟踪控制器, 最后进行了路径跟踪湖试, 经过对试验曲线的分析, 验证了该方法的有效性, 为今后进一步优化路径跟踪探明了一条可行的技术途径。
自主水下航行器; 路径跟踪; 比例-积分-微分控制器; 航路点跟踪
0 引言
随着科技不断发展, 自主水下机器人(auto- nomous undersea vehicle, AUV)成为人类进行海洋探索的重要工具, 在军事和民用领域中朝着更为自主、更长的作业时间、更高的隐蔽性、更强大的数据交互能力的趋势前进[1-2]。而路径跟踪作为AUV的重要功能, 对于AUV是否能够精准完成规定使命, 顺利进行回收布放等任务具有重要意义[3]。
目前, 世界上已经有十几个国家在执行多种用途的AUV研制计划, 有的甚至已经可以定制并商业化运作。国内外针对AUV路径跟踪控制问题, 特别是欠驱动 AUV 路径跟踪问题的高水平研究主要集中在最近10年时间。目前针对AUV路径跟踪问题, 大多将三维路径进行解耦, 分成水平面和垂直面进行分别控制。Lapierre等[4-5]针对AUV的水平面路径跟踪问题, 基于虚拟向导建立路径跟踪误差方程, 基于反步法设计艏向控制器。Oh等[6]采用视线引导法对航路点跟踪建模, 通过求解线性约束优化问题来提高路径跟踪控制器性能。边信黔等[7]采用滑模变结构控制方法进行AUV路径跟踪控制器设计, 并考虑了AUV模型参数不确定性和海流干扰的影响。上述研究可以看出, 当前对于AUV的路径跟踪研究主要集中在二维平面内, 绝大部分还停留于理论研究阶段, 能真正应用于实际系统只是少数。
文中结合自主研发的“探海Ⅰ型”AUV样机, 介绍了其结构和软硬件设计, 并且针对路径跟踪功能, 阐述了航路点跟踪原理[8], 以全球定位系统(global positioning system, GPS)、多普勒速度计程仪(Doppler velocity log, DVL)、光纤惯导和深度计为基础的导航算法与比例-积分-微分(proportion-integral-derivative, PID)控制器设计, 最后进行湖试, 验证了路径跟踪功能。
1 全驱动AUV系统结构及原理
“探海Ⅰ型”AUV系统主要由水面设备和水下设备组成, 水面设备由光端机(水上)、无线数传设备、光滑环、光纤绞盘和岸基控制单元等组成。水下部分为AUV实体, 主要包括艏段, 艏部推进段, 电子舱段, 艉部推进段和主推进段5部分。AUV的结构平面图如图1所示。
AUV控制系统分为甲板单元和水下部分, 甲板单元的硬件设备主要包括水面控制箱(光端机和无线数传设备)、监控计算机以及水密光纤套组, 甲板单元的主要作用是:
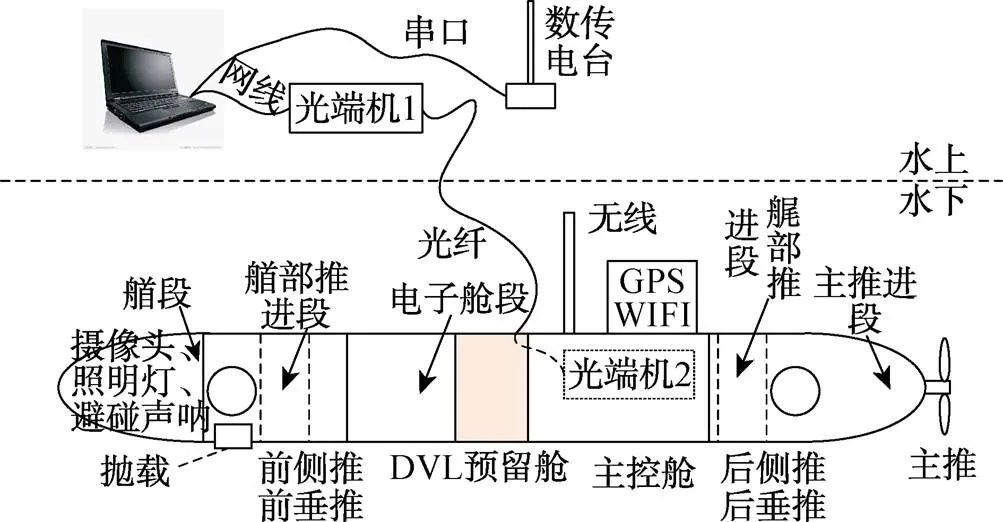
图1 “探海Ι型”自主水下航行器结构平面图
1) 将AUV采集到的视频图像和声呐图像、AUV的航向姿态、地理方位、漏水检测和电源状态等在甲板单元上显示出来;
2) 将上位机的控制指令下达给下位机, 完成AUV的自主任务。
水下部分分为自动驾驶单元、运动控制单元、导航单元与信息测量单元。
自动驾驶单元主要包括主控系统和电源管理系统两部分。主控系统为PC104工控主板, 其作为整个AUV的控制核心和枢纽, 主要完成各传感器信息的采集、处理和传输, 并接收各种指令, 控制AUV完成相应任务。主控系统与甲板单元和各设备之间的连接如图2所示。
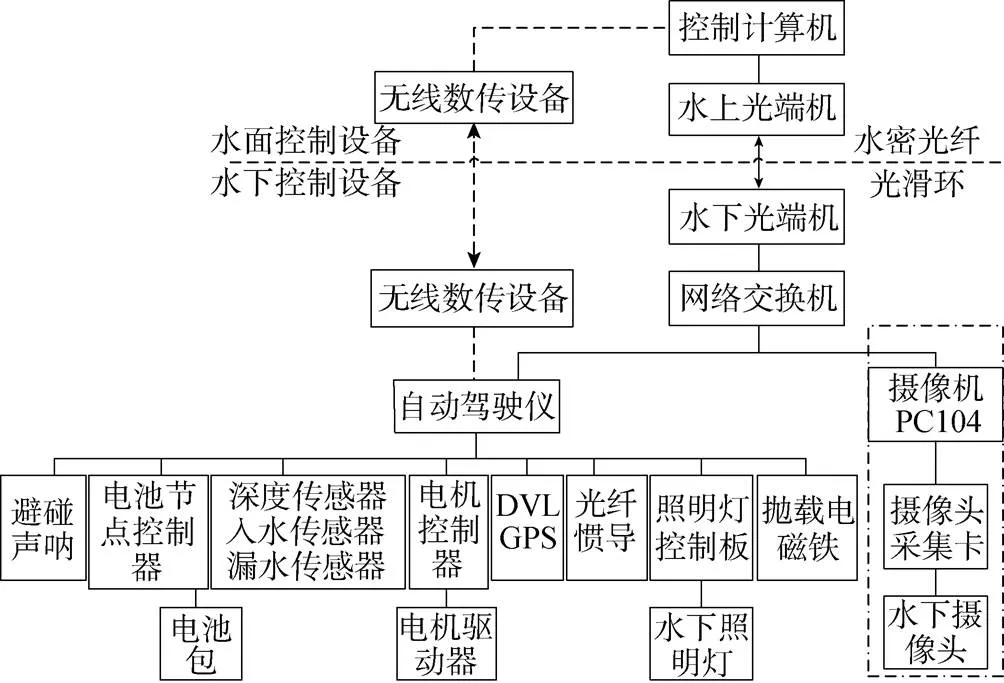
图2 AUV设备连接图
AUV实体样机如图3所示。导航单元以光纤惯导为核心, 通过串口通信接收DVL、深度计和GPS信息, 获取AUV 当前的位置信息, 进行数据储存或发送至主控单元; 此外, 导航单元还可以从主控单元接收传感器的设置信息或导航定位需要的数据, 进行自身校准或转发给相应传感器。

图3 AUV实体样机
文中软件系统基于嵌入式PC104架构, 使用MOOS库进行应用开发。MOOS是麻省理工大学开发的专门为水下机器人设计的C++开源软件架构,具有星型拓扑结构、模块化和分布式的特点。软件系统主要包括中央控制单元MOOSDB、传感器数据采集单元、PID运动控制单元、pHelm行为控制单元和岸基控制单元, 各单元主要功能如图4所示。
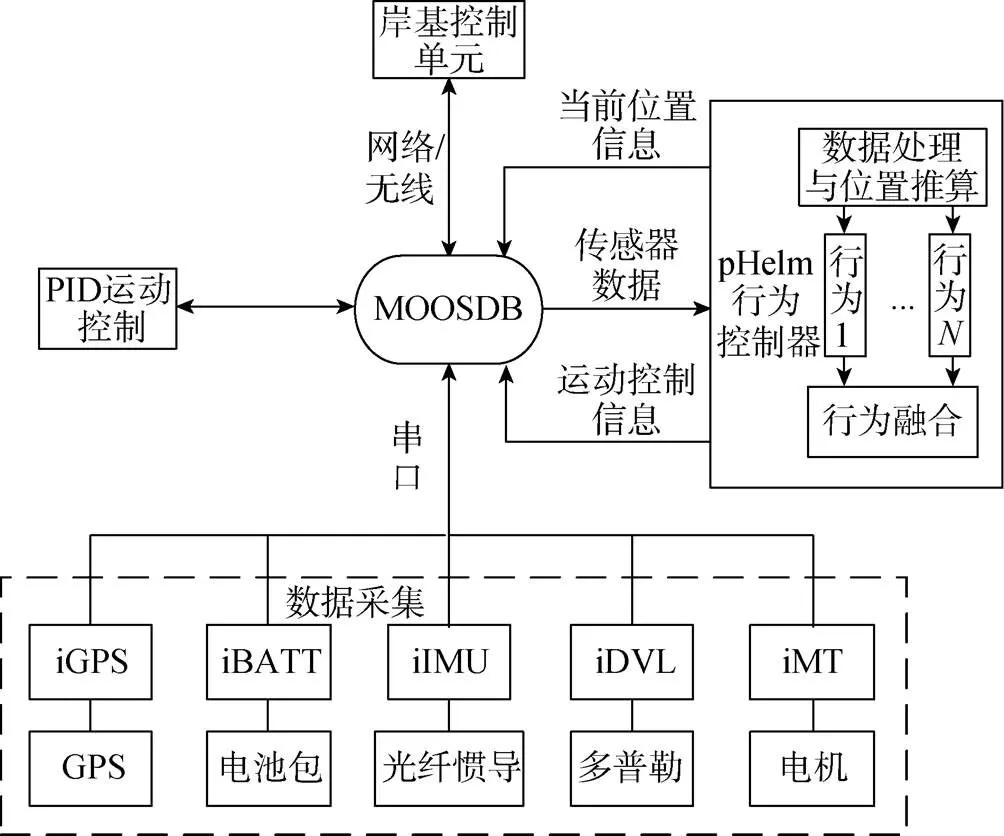
图4 AUV软件系统结构图
1) 中央控制单元MOOSDB: MOOSDB是整个MOOS软件系统的核心, AUV在运行时的所有数据均存于此数据库, 任何需要特定数据的应用软件通过订阅此数据库即可获取相应信息。
2) 传感器数据采集单元: 主要对GPS地理坐标采集、光纤惯导姿态和加速度信息采集、DVL三轴速度采集和深度计深度采集以及电机转速信息等数据的采集, 为AUV实现运动控制和位置推算等功能提供数据。
3) PID运动控制单元: PID控制单元通过订阅pHelm行为控制单元期望航向、期望速度和期望深度等信息, 采用控制算法, 输出相应的AUV各推进器转速。
4) pHelm行为控制单元: 根据从中央控制单元获取传感器数据信息计算得到AUV当前的位置信息, 并将AUV不同的运动行为信息进行融合。
5) 岸基控制单元: 即上位机监控界面系统, 主要通过光纤、WIFI和无线数传电台3种通信方式对AUV进行设备监控和任务使命下达。
2 基于航路点的AUV路径跟踪
2.1 AUV坐标系构建

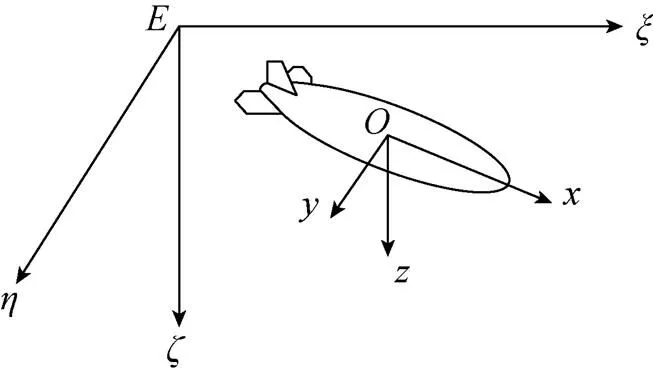
图5 AUV坐标构建图
表1列举了AUV位置分量、角度分量、线速度分量、角速度分量、力分量和力矩分量在相应坐标系下的符号含义。
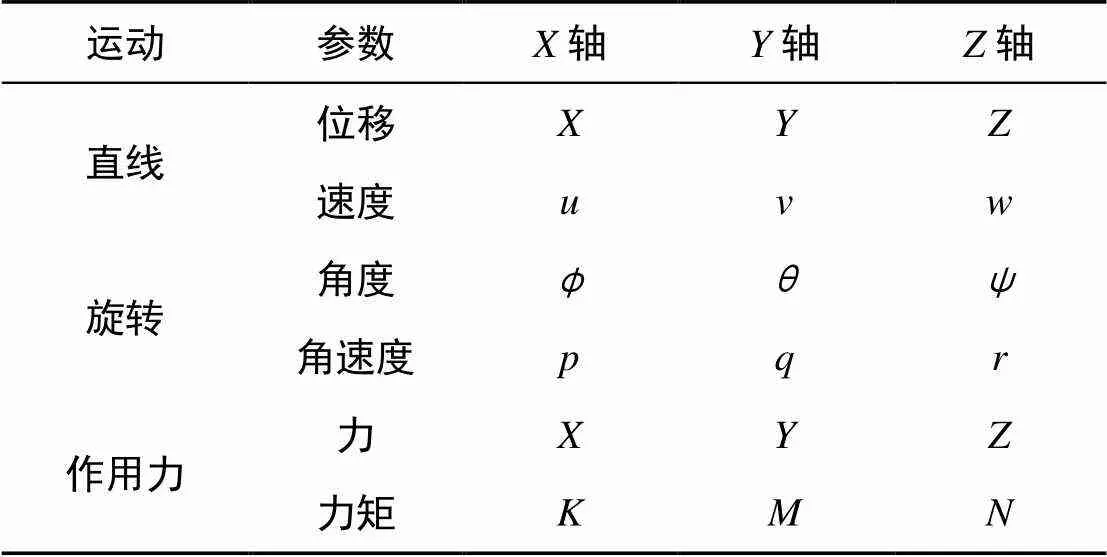
表1 AUV运动参数定义

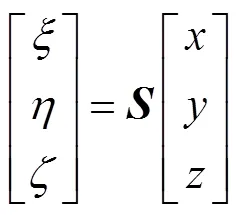
得到旋转变换矩阵
可以将动坐标系坐标转化到大地坐标中, 即
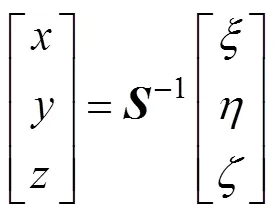
反变换后得
2.2 基于航路点路径跟踪原理
每一条使命路径由若干个航路点构成, 这些航路点在-平面内定义。如图6所示, 使命的基本目的是同一系列坐标系航迹点。捕获半径是指AUV在捕获半径内意味着到达目标点, 足够接近半径指在此半径内AUV可以通过减速等一系列决策以达到目标点。
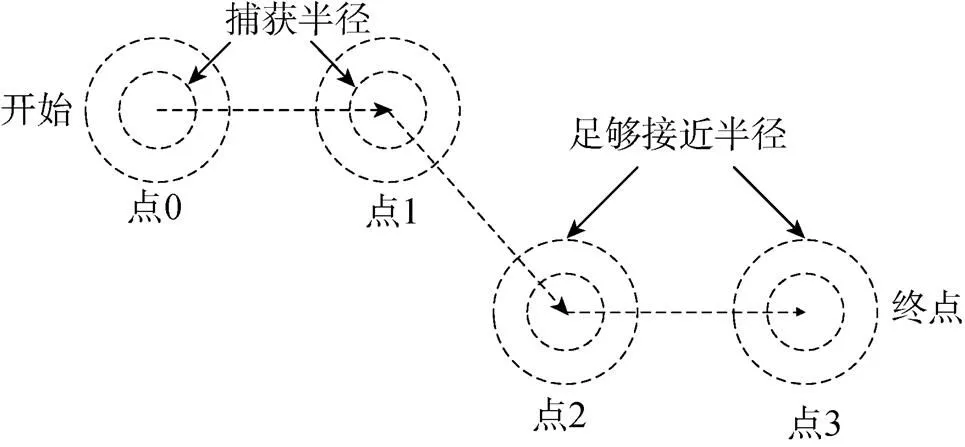
图6 航路点跟踪原理图


与传统的航路点控制算法相比, 文中采用的路径跟踪控制算法根据横向距离实时切换跟踪航路点, 在应对海流干扰时具有较好的路径跟踪能力。
2.3 PID路径跟踪控制器
AUV要想实现路径跟踪功能, 需要对水下推进器有较为精确的控制能力, 必须实现推进器的闭环控制。综上所述, 文中AUV采用PID作为路径跟踪控制器, 如图8所示。

图8 比例-积分-微分控制框图
欠驱动AUV的路径跟踪控制主要将AUV解耦为水平面和纵平面控制, 通过设计艏向、深度、速度控制器输出舵机舵角和推进器转速。而全驱动型AUV将控制量分为平移控制量(轴、轴、轴)、转矩控制量(轴、轴), 其中在航路点跟踪模式下启用轴速度控制、轴深度控制、轴转矩纵倾角控制和轴转矩航向角控制。
2.4 AUV航位推算
AUV路径跟踪依赖于航位推算。AUV水下航位推算系统包含光纤惯导的姿态数据采集和处理、深度计测量、水平经纬度推算。其中水平经纬度的推算采用AUV入水点经纬度坐标作为初始状态, 以AUV航向、速度和传感器采样时间作为依据, 从而推出其在水下的位置。其中深度通道采用AUV深度计测量值。
首先计算AUV在GPS大地坐标系下的位移增量

地球几何形状为椭球体, AUV的位移增量在纬线圈和子午圈中近似表示为一段圆弧, 通过除以曲率半径可以得到经纬度增量。其中, 纬线圈可以看作正圆, 并随纬度增加而变小, 子午圈是一个扁平的椭圆, 长半轴为, 短半轴为。
(8)
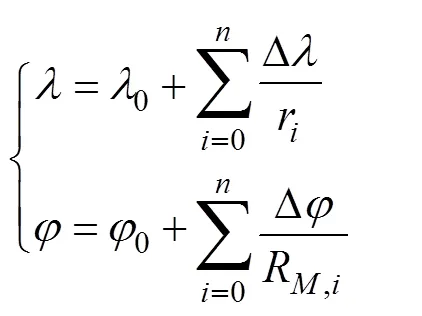
结合式(1), 在t(> 0) 时刻, AUV在水下的经纬度可表示为[10]
3 AUV路径跟踪湖试
为验证所研制的“探海Ⅰ型”AUV能否满足设计要求, 进行了相关湖试试验。试验地点选择为某天然湖泊, 试验水域的水深范围5~40 m, 湖底较平坦, 湖水流速不大于2 kn, 试验条件较好。
3.1 水面路径跟踪试验
给定水面轨迹, 依赖航位推算系统进行水面路径跟踪试验, 设定AUV整个使命航速恒定为0.8 kn, 使命时间1 500 s, 初始位置GPS经纬度为(120.317741, 31.109846), 起始航迹点GPS经纬度为(120.319405, 31.109317), 目标航迹点GPS经纬度为(120.319405, 31.109317), 回收航迹点GPS经纬度为(120.317 655, 31.109 634), 如图9所示, A为起始点、B为回收点、C为目标航路点。
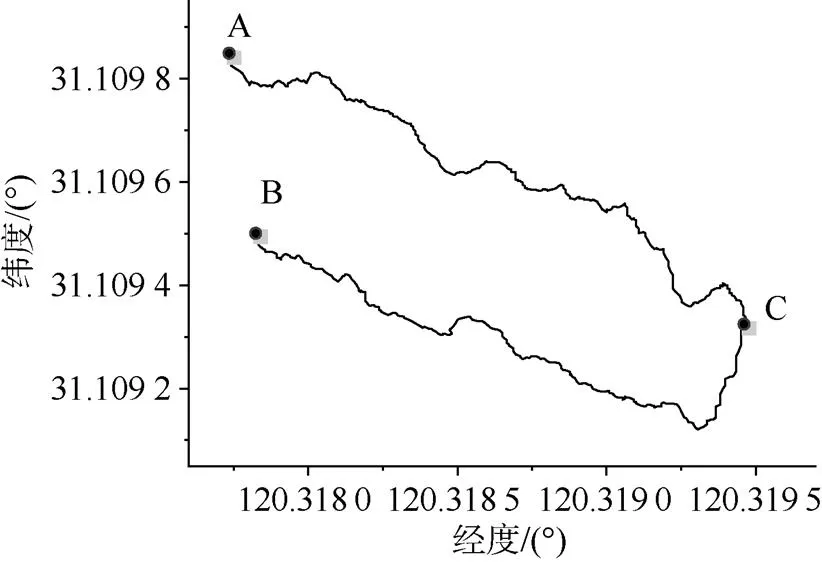
图9 水面航迹全球定位系统曲线
图中, AUV根据GPS经纬度信息逐渐接近预设航迹点, 具体实现方法是通过航路点算法得到期望航向角, 将其作为PID闭环控制的输入进行路径跟踪控制, AUV期望航向与实际航向如图10所示, 水面路径跟踪试验部分试验数据如表2所示, AUV总体上完成了水面航迹跟踪任务, 但由于试验当天天气造成GPS导航精度变差和湖面水流干扰, 航迹存在一些波动, AUV不能较好地沿着直线朝C点行进。
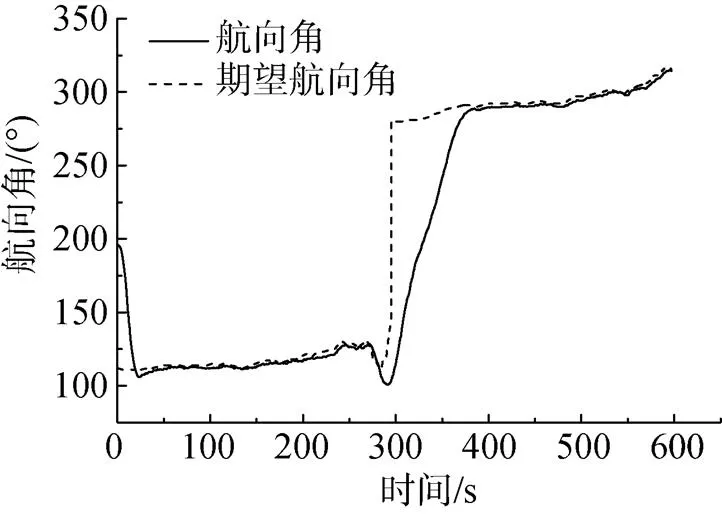
图10 期望航向与实际航向的对比曲线图
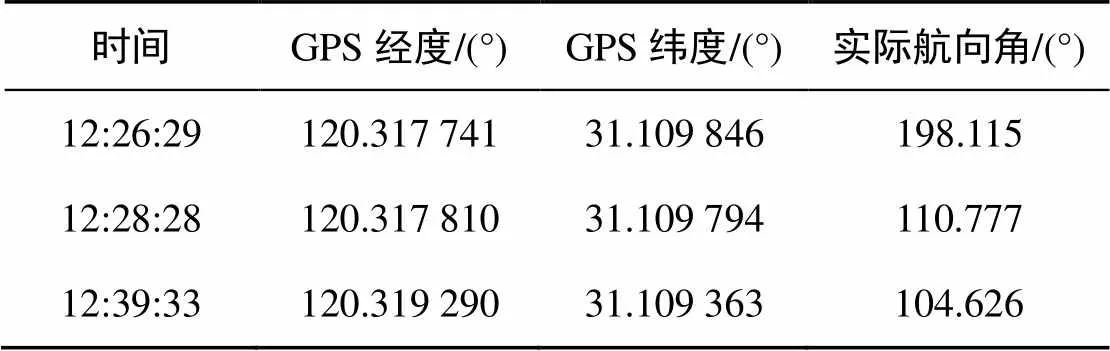
表2 水面路径跟踪试验部分数据
3.2 水下路径跟踪试验
在上位机中给定巡航中心点和运动图形, 如图11所示, 依赖航位推算系统进行水下路径跟踪试验。使命规划: AUV航速0.8 kn, 下潜深度3 m, 初始位置GPS经纬度为(120.317 474, 31.109 632), 起始航迹点GPS经纬度为(120.318199, 31.109 256),回收航迹点GPS经纬度为(120.317 421, 31.109 615),巡航图形为六边形, 巡航中心位置为(120.318199, 31.109 256), 自主导航时间为600 s。根据航位推算出的经纬度画出巡航轨迹如图12所示。图13为航迹的二维平面图, 图中不包含回收曲线。表3为部分试验数据, 可以看出AUV进行自主巡航的稳定性很高, 巡航使命结束浮出水面返回回收点的过程中, 湖面起风, 水流波动较大, 导致AUV存在部分轨迹杂乱。另外由于AUV自身的稳心所带来下潜时的晃动, 使得深度跟踪存在一定的波动。但是总体上使用航路点跟踪方法进行AUV水下路径跟踪的路径辨识度较高。
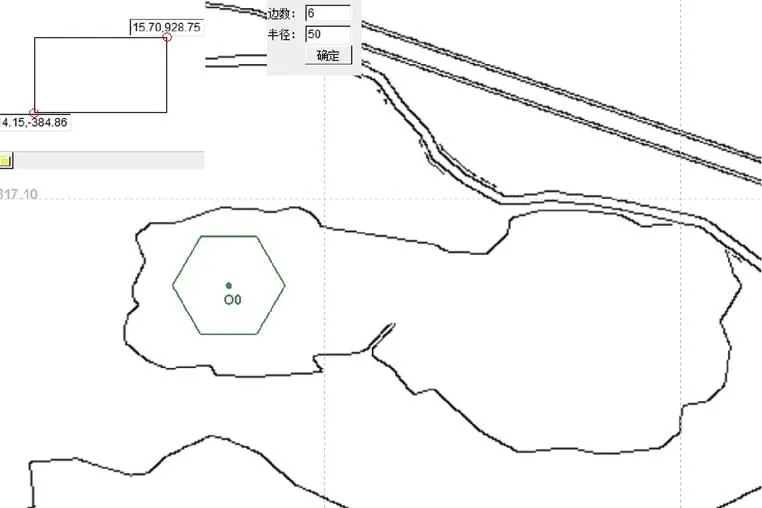
图11 上位机航迹规划界面图
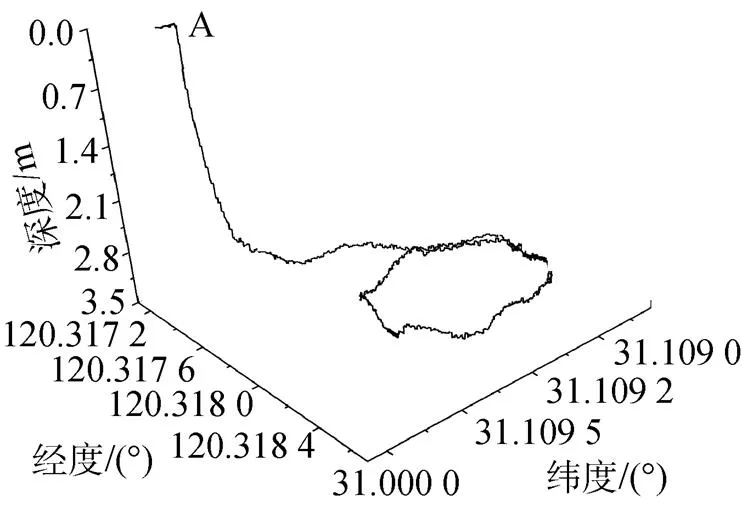
图12 水下六边形自主巡航经纬度轨迹
在AUV执行路径跟踪使命时, 通过GPS、光纤惯导、深度计和DVL多种传感器进行航位推算, 同时采用航路点跟踪和PID控制器作为路径跟踪控制, 较好地解决了AUV导航精度不够和洋流干扰的问题。
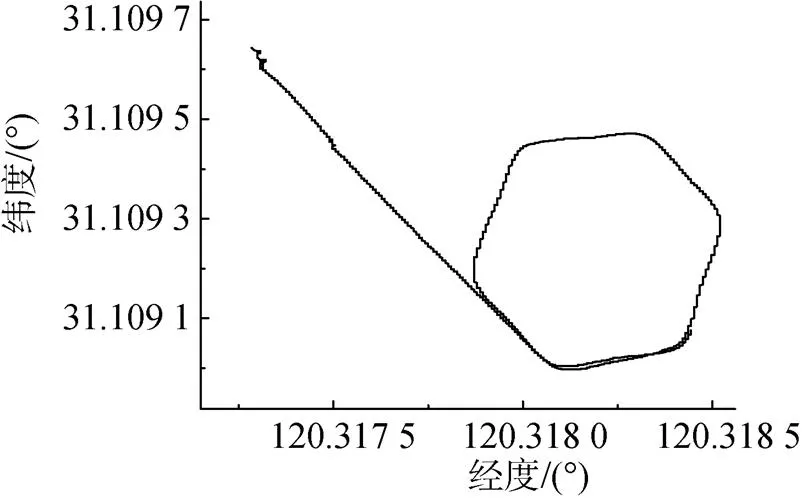
图13 水下六边形自主巡航经纬度轨迹二维平面图

表3 水下路径跟踪试验部分数据
4 结束语
路径跟踪作为AUV的重要功能, 一直是国内外研究的热点。文中通过光纤惯导、深度计、GPS和DVL等硬件设备, 以航路点跟踪原理为基础, PID作为路径跟踪控制器, 实现了“探海Ⅰ型”AUV的路径跟踪功能, 并且通过湖试, 对航路点跟踪原理、导航算法以及控制器的有效性进行了验证。试验结果表明, 以PID作为控制器的航路点路径跟踪能够较好地完成路径跟踪任务。当前AUV采用常规的PID控制器, 今后将采用先进的智能控制方法来提高AUV路径跟踪效果; 在路径跟踪应用方面, 会将此AUV应用于目标探测、回收等实际任务需求, 并且开展对欠驱动AUV路径跟踪的研究工作。
[1] 王芳, 万磊, 李晔, 等. 欠驱动AUV的运动控制技术综述[J]. 中国造船, 2010, 51(2): 227-241.Wang Fang, Wan Lei, Li Ye, et al. A Survey on Development of Motion Control for Underactuated AUV[J]. Shipbuilding of China, 2010, 51(2): 227-241.
[2] 钟宏伟. 国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25(4): 215-225.Zhong Hong-wei. Review and Prospect of Equipment and Techniques for Unmanned Undersea Vehicle in Foreign Countries[J]. Journal of Unmanned Undersea Systems, 2017, 25(4): 215-225.
[3] 赵朝闻, 张淞, 李辉. 基于超短基线的AUV自主对接流程及算法[J]. 鱼雷技术, 2016, 24(3): 166-171.Zhao Chao-wen, Zhang Song, Li Hui. Autonomous Abutting Joint Flow and Control Algorithm for AUV Based on Ultra-short Baseline[J]. Torpedo Technology, 2016, 24(3): 166-171.
[4] Lapierre L, Soetanto D. Nonlinear Path-following Control of an AUV[J]. Ocean Engineering, 2007, 34(11): 1734- 1744.
[5] Lapierre L, Jouvencel B. Robust Nonlinear Path-following Control of an AUV[J]. IEEE Journal of Oceanic Engineering, 2008, 33(2): 89-102.
[6] Oh S R, Sun J. Path Following of Underactuated Marine Surface Vessels Using Line of Sight Based Model Predictive Control[J]. Ocean Engineering, 2010, 37(2-3): 289- 295.
[7] 边信黔, 程相勤, 贾鹤鸣, 等. 基于迭代滑模增量反馈的欠驱动AUV地形跟踪控制[J]. 控制与决策, 2011, 26(2): 289-292, 296.Bian Xin-qian, Cheng Xiang-qin, Jia He-ming, et al. A Bottom-following Controller for Underactuated AUV Based on Iterative Sliding and Increment Feedback[J]. Control and Decision, 2011, 26(2): 289-292, 296.
[8] 高剑, 李勇强, 李璐琼, 等. 基于航路点跟踪的AUV回收控制[J]. 火力与指挥控制, 2013, 38(8): 103-106.Gao Jian, Li Yong-qiang, Li Lu-qiong, et al. Autonomous Recovery of an AUV Based on Way-Point Tracking Control[J]. Fire Control & Command Control, 2013, 38(8): 103-106.
[9] 严浙平, 宋金雪. 模型辅助和洋流估计下的UUV导航定位方法[J]. 水下无人系统学报, 2017, 25(5): 319-325.Yan Zhe-ping, Song Jin-xue. UUV Navigation and Positioning Method Based on Model-Aided and Ocean Current Estimation[J]. Journal of Unmanned Undersea Systems, 2017, 25(5): 319-325.
[10] 周佳加, 边信黔, 王宏健, 等. 基于小波的无人潜航器航位推算算法研究[J]. 仪器仪表学报, 2012, 33(3): 670-676.Zhou Jia-jia, Bian Xin-qian, Wang Hong-jian, et al. Study on Dead Reckoning Method for Unmanned Underwate Vehicle Based on Wavelet[J]. Chinese Journal of Scientific Instrument, 2012, 33(3): 670-676.
Design and Implementation of a Path Tracking System for Fully Actuated AUV
YAO Jin-yi, ZENG Qing-jun, ZHOU Qi-run, ZHU Zhi-yu, BAO Ling-hui
(School of Electronics and Information, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
Aiming at the application requirements for such as recovery, underwater search and rescue, and so on, a path tracking control system for fully actuated autonomous undersea vehicle(AUV) is proposed based on global positioning system(GPS), Doppler velocity log(DVL), optical fiber inertial navigation, depth gauge and waypoint tracking. The distributed system structure of AUV, the software design based on MOOS, the hardware design based on PC104 bus architecture are introduced according to the independently developed T-Sea I type AUV prototype. The principle of waypoint tracking and the navigation algorithm based on GPS, DVL, optical fiber inertial navigation and depth gauge are discussed, and then a proportion-integral-derivative(PID) path tracking controller is designed. Lake test of path tracking is carried out and the test curves are analyzed to verify the validity of the proposed method.
autonomous undersea vehicle(AUV); path tracking; proportion-integral-derivative(PID) controller; waypoint tracking
TJ630; TB568
A
2096-3920(2019)04-0452-07
10.11993/j.issn.2096-3920.2019.04.014
姚金艺, 曾庆军, 周启润, 等. 全驱动AUV系统路径跟踪设计与实现[J]. 水下无人系统学报, 2019, 27(4): 452-458.
2019-01-17;
2019-03-29.
国防基础科研计划项目(JCKY2017414C002); 国家自然科学基金资助项目(11574120); 江苏省产业前瞻与共性关键技术项目(BE2018103).
姚金艺(1993-), 男, 在读硕士, 研究方向为水下机器人运动控制.
(责任编辑: 许 妍)
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
火力与指挥控制(2022年2期)2022-03-23
导航定位与授时(2022年1期)2022-02-18
数字海洋与水下攻防(2020年5期)2021-01-04
火力与指挥控制(2020年2期)2020-04-02
导航定位与授时(2020年1期)2020-02-18
电子技术与软件工程(2020年7期)2020-02-05
科技资讯(2018年10期)2018-10-26
新课程·中旬(2017年1期)2017-03-27
环球时报(2016-08-01)2016-08-01