
DIS辅助验证牛顿第二定律并分析a-F图像的误差率
2019-08-20 06:33:10陈鸿翔
物理通报 2019年8期
陈鸿翔
(湖州市菱湖中学 浙江 湖州 313018)
1 实验装置平衡摩擦力
安装好力学轨道,调节T型支撑架端的轨道高度,并将20 mm宽的I型挡光片安装在小车上,调节光电门传感器的位置,使其左右位置和上下位置合适,如图1所示.
将小车放置到轨道的不带滑轮的一端,轻推小车,观察小车通过两个光电门的挡光时间,当发现两时间非常接近(如图2所示),则说明已经平衡摩擦力.

图2 小车通过两个光电门的挡光时间
2 测量传感器无法采集的实验数据
实验当中所用到的器材如图3所示,其中牵引小车的小桶质量m0,小车质量M,两个光电门之间的距离l均无法利用传感器读出,因此,需要在实验当中利用天平与刻度尺加以测量并记录在表1中.其中配重片的质量每片约为50 g,可在具体使用时再用天平测量.
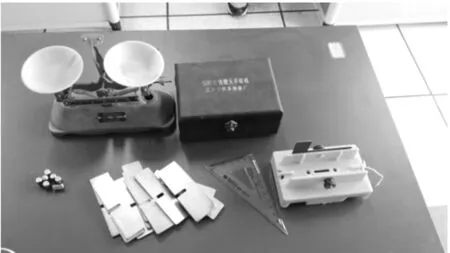
图3 本实验所用到的实验器材
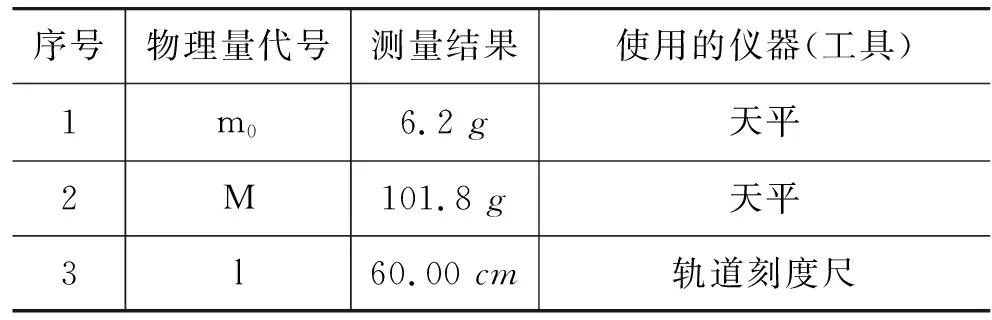
序号物理量代号测量结果使用的仪器(工具)1m06.2 g天平2M101.8 g天平3l60.00 cm轨道刻度尺
3 实验的具体操作
将两个光电门依次接在采集器的1,2通道,将采集器连接电脑,设置相关参数,然后依次在小桶中增加砝码,利用细绳牵引小车在轨道上运动,并在通用软件界面下,用计算表格记录实验数据,在计算表格中,增加所需要的变量,并输入已知的和表格1中需要直接测量的数据,如图4所示.

图4 计算表格记录数据采集器的数据以及输入的变量
将计算表格中采集到的实验数据导入Excel表格当中,利用计算公式,分别计算出不同砝码牵引下的细绳拉力F(取当地重力加速度g=9.794 m/s2)与之对应的小车加速度a.
4 数据处理与分析
在小车上增加配重片,使小车质量M达到约为砝码与砝码桶m最大质量的5倍.取小车质量M=0.181 8 kg,记录数据如表2所示.

表2 增加配重片测量实验数据
根据表格中的数据可以作出当
时小车加速度a与小车受到拉力F的图像关系如图5所示,并给图线添加线性趋势线同时显示趋势线方程.

图5 小车质量M是砝码最大质量m的5倍时的a-F图
通过趋势线线性方程的斜率k=4.326 2可以获得小车质量的实验值为M′=0.231 kg.将获得的小车质量的实验值代入到质量的相对误差率的公式当中,可得到在小车质量M是砝码最大质量m的5倍条件下的相对误差率
η=27.15%
可见为了提高本实验的精确度,需要加大小车质量与砝码质量的倍数.因此,在实验过程中可以对小车质量M与砝码最大质量m的倍数取10倍、15倍、20倍、25倍关系下的a-F图像.在实验过程中可以通过增减小车上的配重片来改变小车的质量M,并在不同的倍数关系下进行多次实验,从而记录下多组数据如表3所示.
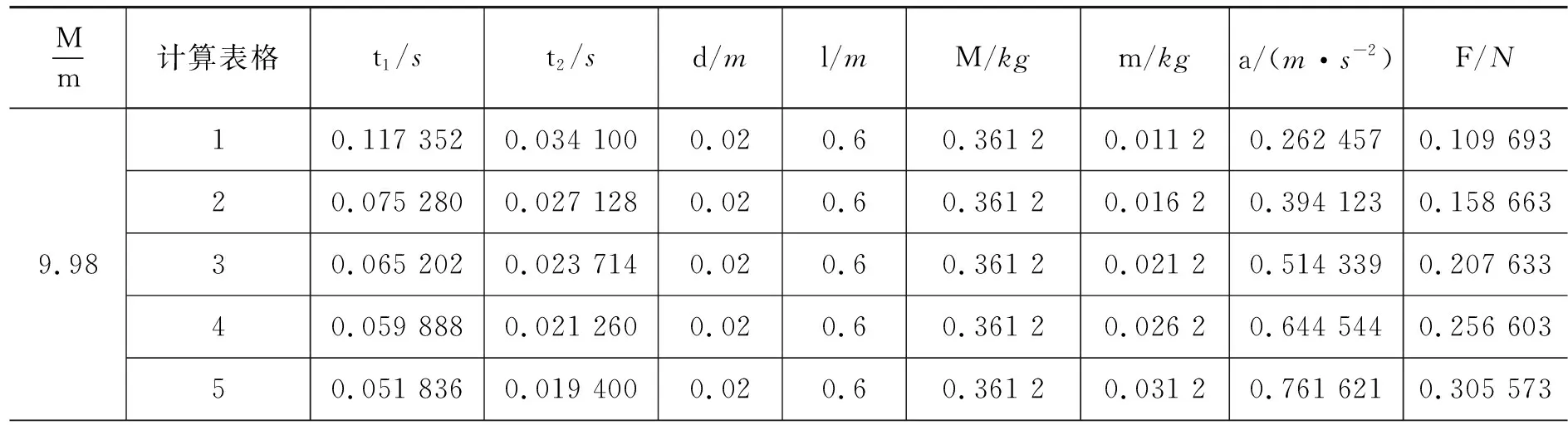
表3 改变小车质量与砝码质量的倍数实验数据

续表


图6 不同M与m比值下小车的a-F图像
在图像当中添加各条图线的趋势线方程,并从各条趋势线方程的斜率当中获得小车质量的实验值M′,并和小车质量的实际值M代入到质量相对误差率η的公式中计算出相对误差率,将记录的数据与计算得到的结果记录到表4中.


表4 相对误差率结果
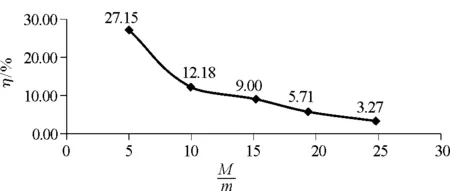
图7 小车质量相对误差率随倍数变化的关系图
5 结束语

猜你喜欢
小学生学习指导(低年级)(2023年10期)2023-10-28 06:34:46
小学生学习指导(低年级)(2023年4期)2023-05-09 11:52:54
小学生学习指导(中年级)(2022年9期)2022-09-30 03:15:40
健康大视野(2020年1期)2020-03-02 11:33:53
科技创新与应用(2019年26期)2019-10-24 08:49:44
数学小灵通(1-2年级)(2018年6期)2018-06-28 03:15:36
电脑知识与技术(2017年2期)2017-04-25 13:32:31
新高考·英语进阶(高二高三)(2016年4期)2016-09-19 08:16:50
中小企业管理与科技·中旬刊(2016年6期)2016-06-20 14:51:04
数学大王·中高年级(2015年6期)2015-06-26 02:57:20
