
基于Solidworks 的曲柄圆滑块机构仿真分析
2019-08-05 01:46姜慧君金丽琼毛京兵李金禄谭跃进
中国设备工程 2019年12期
姜慧君,金丽琼,毛京兵,李金禄,谭跃进
(合肥通用机械研究院有限公司 压缩机技术国家重点实验室,安徽 合肥 230031)
一般活塞式压缩机中的传动方式多采用曲柄连杆机构,该机构具有技术成熟、加工方便等优点,但也存在着运转过程中惯性力不好平衡、机组振动大且不好消除的缺点。随着人们对设备振动噪音越来越多的关注,减振降噪的要求也越来越高。曲柄圆滑块机构就是为了改善设备的振动噪声而在曲柄连杆机构的基础上改进得来的,此传动机构消除了二阶惯性力,减小了设备的振动。本文就是通过采用Solidworks里的Motion 插件,对该机构进行运动学仿真分析,得到机构的运动规律。
1 Solidworks Motion 仿真分析基本流程
Solidworks Motion 是Solidworks premium 版本里的一个功能强大的仿真计算插件,它使用计算能力强大的动力求解器,可以在计算中添加材料属性和质量及惯性,可用于精确模拟和分析装配体上的运动状态,还可使用它描述模拟结果供进一步分析。
Solidworks Motion 仿真分析的基本流程首先是对机构进行建模,得到装配体后通过对模型添加定义和约束,并对其施加力和驱动,建立一个完善的接近于真实的系统,进行分析仿真,最后处理分析结果并得出结论。
2 曲柄圆滑块机构原理分析
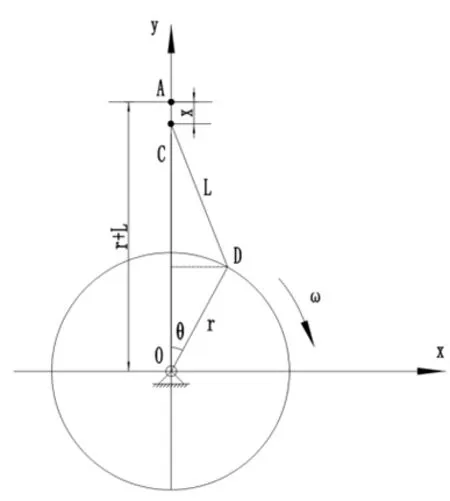
图1 曲柄连杆机构原理图
常见的曲柄连杆机构中有个重要的参数叫曲柄连杆比λ,为曲柄半径r 与连杆长度l 的比值,即。在活塞式压缩机中,曲柄连杆比对活塞的运动学影响很大。通常连杆比λ 的取值是在1/3 ~1/6,值越小表示连杆长度越长,压缩机活塞轴向方向所需的空间越大;值越大表示连杆长度越短,机构紧凑,但活塞上所承受的侧向力会越大。曲柄连杆机构的原理图如1。
一般曲柄连杆机构活塞的运动规律为:

式中,r 为偏心距,θ 为曲轴转角。
曲柄圆滑块机构是从曲柄连杆机构演变而来。当λ 的值变为1 时,曲柄和连杆的长度相等,机构就演变成了曲柄圆滑块机构。曲柄圆滑块机构的原理图如图2。
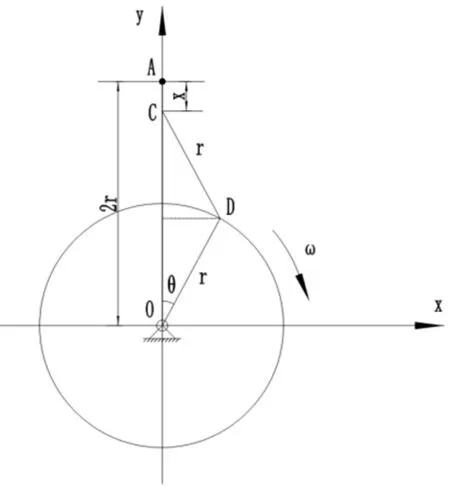
图2 曲柄圆滑块机构原理图
在曲柄圆滑块机构中,由于连杆比λ 为1,则:
其中ω 为曲轴旋转角速度。
3 曲柄圆滑块机构运动学仿真
Solidworks Motion 是Solidworks 里的一个功能强大的插件,在对装配体添加约束、驱动及作用力后可以用于分析求解装配体的状态,可以得到机构的运动学仿真。
3.1 建模
建模得到曲柄圆滑块活塞机构的三维装配图,见图3。
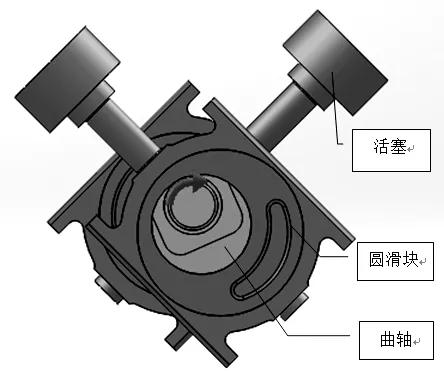
图3 曲柄圆滑块机构装配图
3.2 添加配合及驱动
在对圆滑块、曲轴及活塞施加定位及约束后,对曲轴施加一个“马达”,模拟机构的运转。
3.3 选择“结果和图解”,确定要分析计算的参数
在Motion 插件里选择“结果和图解”命令后,再选择“位移/速度/加速度”选项,依次选取子类别中的“线性位移”“线性速度”“线性加速度”,再选取Y 分量,对其中一列活塞选取顶部进行分析,可以得到活塞的位移曲线,速度曲线和加速度曲线。
3.4 仿真分析结果
为了便于分析,将曲轴的转速设定为6r/min,分析的时长选取为15s 即1.5 个周期。在Solidworks 的Motion 模块里进行结果分析,依次得到活塞的位移、速度和加速度随时间的图解。
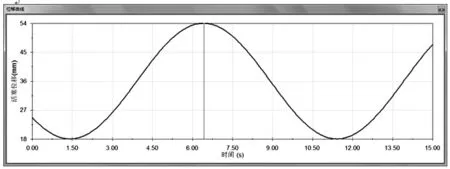
图4 活塞位移曲线
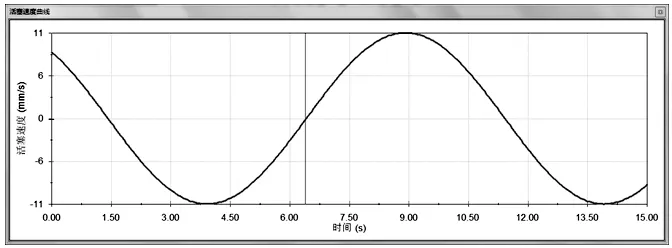
图5 活塞速度曲线
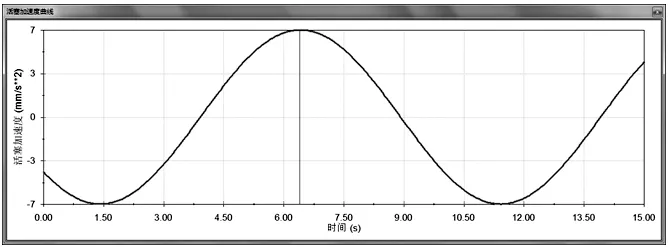
图6 活塞加速度曲线
由活塞的位移速度及加速度曲线可以看出来,活塞的运动规律为一个简谐运动,与前面的公式推导结果保持一致。3 个曲线的周期相同均与曲轴的旋转周期相同。当活塞到达上止点时,此时位移达到最大值,速度为零,加速度达到最大值;当活塞运动到行程中点处,此时速度达到最大值,加速度为零;当活塞运动到下止点时,此时位移达到最小值,速度为零,加速度达到最小值。
4 结语
本文采用Solidworks 里的Motion 分析模块对曲柄圆滑块机构进行建模及运动学仿真分析,得到曲柄圆滑块机构的运动学特性。该方法也可以用于其他四杆机构、复杂机构的运动学分析,相较于数学原理分析,采用计算机仿真分析得出的结果更形象直观。
猜你喜欢
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
电子制作(2019年15期)2019-08-27
重型机械(2019年3期)2019-08-27
新商务周刊(2017年5期)2017-10-16
科学家(2015年12期)2016-01-20
海军航空大学学报(2015年1期)2015-11-11
