
基于垂向定位与灰度投影的地铁扣件定位方法
2019-07-25 00:37王宇桐许贵阳周素霞
铁道建筑 2019年6期
王宇桐,许贵阳,周素霞
(1.北京建筑大学 机电与车辆工程学院,北京 100044;2.北京建筑大学 城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
钢轨扣件是联结钢轨与轨枕的重要零件[1]。一旦出现扣件缺失、断裂、不完整等扣件异常状态,会给轨道行车安全带来重大隐患,甚至出现重大安全事故。近年来,大部分地铁线路仍然采用人工巡检方式进行日常轨道扣件检查,但是人工巡检具有效率低、易疲劳等缺点,随着计算机与人工智能技术发展,采用技术装备检测代替人工检测作业已成为必然趋势[2-3]。
自21世纪初期以来,我国在轨道检测中引入计算机视觉和图像处理技术和设备,使用轨检车对轨道进行周期性检测,拍摄轨道扣件图像,再采用图像处理技术自动判断扣件状态,逐渐替代人工巡检,成为一种新的主流扣件检测方法[4-5]。
在扣件定位方法中占据主流地位、应用最为广泛的是十字交叉定位法[6-7]。扣件在有砟轨道上具有显著的位置特征,即扣件都安装在轨枕上,处于轨枕与钢轨的交叉位置,这两部分在道床上天然构成了一个十字结构,可以作为确定扣件相对位置的基准。图1为有砟轨道扣件。但由于拍摄时车辆与轨道的平顺性较差,钢轨与轨枕无法与图像边界保持垂直,因此扣件与图像边界的相对位置时刻都在变化。

图1 有砟轨道扣件
一些学者在十字交叉定位法的基础上进行了发展。万超[8]提出了一种改进的十字交叉定位法,即根据先验信息初步确定扣件位置,再先后分别对扣件水平及垂直位置进行定位,可以有效提升定位效率;刘甲甲[9]提出了一种对称定位方法,由于扣件安装时两两关于钢轨左右对称,所以先用十字及枕肩对单侧扣件进行定位,再根据对称性定位另一侧扣件,定位准确率较高。
在地铁线路上,近几年大量使用整体道床替代了传统的有砟轨道,结构上产生了巨大变化。鉴于城际铁路与地铁在线路情况、运行速度、运营特点等诸多方面都有较大差别,为了使新型轨道巡检仪适用于地铁整体道床,提出了一种基于垂向定位与灰度投影的地铁扣件定位方法。
1 轨道检测设备
1.1 传统轨检车
传统轨检车是由车体及车载轨道状态检测设备组成,车体结构一般分为司机室、观察室、检测室3部分[10]。车载检测设备由于近几年中国铁道科学研究院集团有限公司的大力研发,皆为自动化检测设备,检测范围涵盖了道床区域内可见的多种成分的外观状态。在运行速度方面,城际铁路检测线路长度较大,现役轨检车的车辆速度下限为120 km/h,上限为400 km/h,涵盖了从低速货运到高速客运的不同检测速度要求。图2为城轨综合检测车。

图2 城轨综合检测车
1.2 新型轨道巡检仪
跟城际铁路相比,地铁线路普遍运行距离较短、速度较慢,对轨检车的运行及检测速度没有非常高的要求,这使得轨检车无需装载体积庞大、沉重的内燃机组或变压器等一系列动力装置,而是可以选择轻便环保的动力电池组作为动力来源。在结构方面,地铁线路多在城市地下,为封闭式环境,线路情况与城际轨道相比较为简单,外物侵占轨道限界的情况非常少见,这使得地铁轨道巡检仪可以省略许多在传统综合检测车上存在的结构,使用开放式车体、模块化构架,可以根据地铁实际线路情况选用合适的组件进行检测,见图3。

图3 新型轨道巡检仪
本文使用的地铁轨道检测设备为北京某公司设计制造的新型轨道巡检仪,该检测仪由电动巡检小车和轨道状态巡检系统两部分组成。
电动巡检小车由4个小型轨道轮、车体和2个座椅组成;巡检系统由1台主机和2台高清线阵图像扫描模块组成。
巡检仪工作时需要有1~2名操作人员搭乘、操作巡检车前进至被检区间开始检查。本文使用的智能巡检系统采集速度可达20 km/h,总重量约为 3 000 kN。
该巡检系统有如下特点:
1)动态采集轨道表面数据;
2)海量图像数据实时压缩存储及显示加速技术;
3)搭载精确定位技术,里程定位精度0.3 m;
4)高清图像采集,像素分辨率最高可达0.3 mm;
5)系统检测功能齐全,可覆盖整个轨道结构表面;
6)采用轻量化、结构化设计,操作简单方便,可快速拆装。
在国内,新型轨道巡检仪目前还处于初步普及阶段,近两年在国家环行铁道试验基地、宁波地铁、天津地铁等多个线路进行实际检测应用,取得了良好的检测效果。检测结果表明,新型轨道轨检仪可在动态条件下对轨道及周边表面状态进行连续图像采集,采集速度极快,定位精准,操作简便,可靠性高,可为地铁安全运营提供一种高效、自动、智能的检测手段。
2 整体道床扣件定位特点
整体道床是指钢轨下铺设轨道板作为基础的轨道结构,用一体化的轨道板替代有砟轨道上的轨枕、防爬器、防爬撑和碎石道床等,具有良好的平顺性、稳定性及使用寿命,近几年在地铁线路上被大量使用,见图4。可见,整体道床在进行扣件定位时,只有钢轨这一个固定的竖直方向上的相对坐标,无法构成十字交叉定位体系,无法使用传统扣件定位方法进行定位。
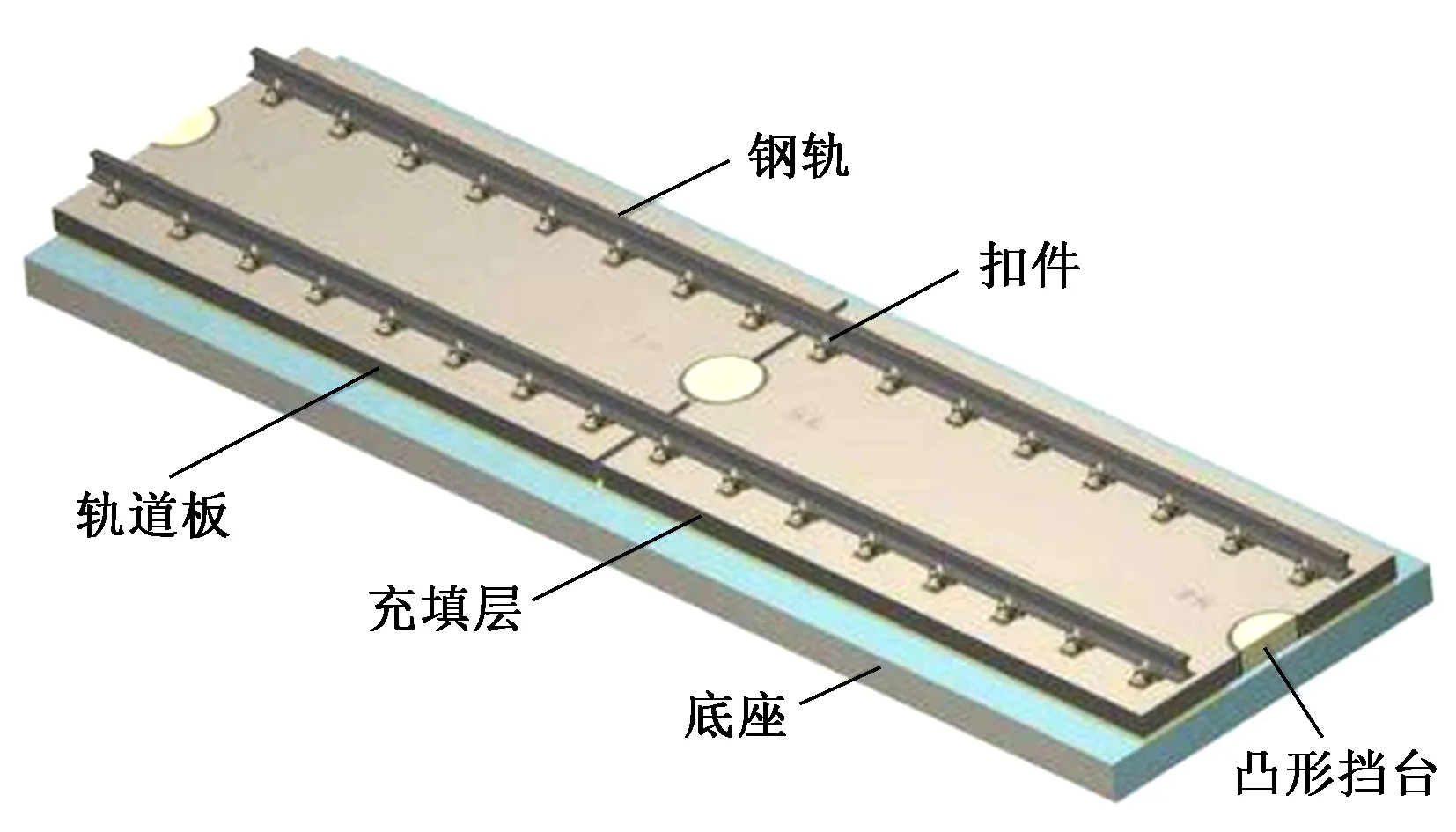
图4 整体道床结构
整体道床同时具有有砟轨道不具备的特点:一体化轨道板灰度值高度一致,与表面光滑的钢轨形成高度反差,并且变化非常明显,定位钢轨边缘效率和准确率较高。由于轨道平顺性良好,轻便的新型轨道巡检仪在合适的巡检速度下具有极高的稳定性,拍摄时不出现振动,使得图像成像时不出现偏移,钢轨与图像左右边界时刻保持平行且距离固定,使用单个垂直坐标结合扣件先验信息就能定位扣件位置。
3 新型扣件定位办法
基于新型巡检仪与地铁整体道床的结构特点,在此提出一种结合灰度投影和垂直定位的扣件定位方法。本文所用图片皆由新型轨道巡检仪拍摄于北京地铁某线,具体步骤详述如下。
3.1 确认扣件先验信息
根据大量轨道图片信息,确定扣件在当前拍摄距离下的大小、大致出现区域及缺陷类型等先验信息。
3.2 对图像进行压缩处理
新型轨道巡检仪搭载的高清线阵图像扫描模块拍摄的图片每张分辨率为 4 096×4 096 像素,大小约为1.4 MB/张,对于扣件定位以后的定位区域提取等工作过于清晰,极大地增加了运算量和运算时间,大大降低了扣件定位的效率。本文在不影响定位准确性的前提下将原始图像的大小降到约为520 kB/张。
3.3 对处理后的图像进行预处理
高斯模糊在图像处理中是一个低通滤波器,可以减少图像噪声以及降低细节层次,增强图像效果,便于后续处理。
边缘检测作为图像分割的主要算法,是图像处理的重要步骤之一[11-12]。边缘作为图像的基本特征之一,指图像中像素灰度发生跳跃式变化的那些像素点。对图片进行边缘检测能够大幅减少除所需信息外的图片数据,准确保留图像中需要的重要信息。
本文对原始图像及压缩后图像在高斯模糊后用Sobel算子和Canny算子进行了边缘检测,对图像中扣件部分局部放大后效果见图5。
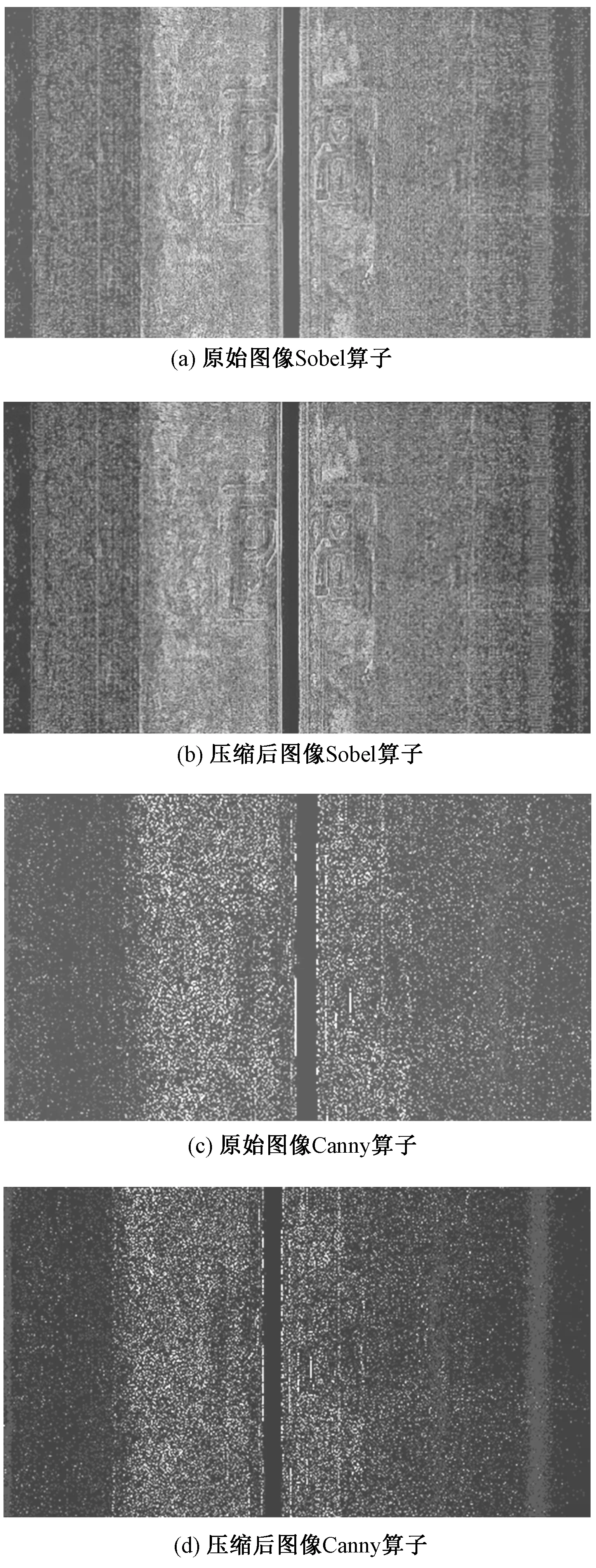
图5 原始图像与压缩后图像的边缘检测
从原始图像与压缩后图像各步对比中可以看出,原始图像与压缩后图像在边缘检测并未出现图片质量上的显著差别,由此可知在定位环节通过合理压缩大小来降低图像运算量,可提高图片处理效率。
由图5(a)、图5(b)可见,一阶Sobel算子得到的边缘信息较多,对钢轨的边缘信息非常敏感,能够准确检测出钢轨轨顶亮面边缘以及实际边缘,同时也能较为准确地显示出扣件的边缘线段,且在二者边缘部分均未出现明显的虚假边缘;由图5(c)、图5(d)可见,二阶Canny算子没有将边缘信息连接成线,钢轨的边缘线出现多处间断,扣件边缘线极不清晰,只是一堆零散的信息点,效果非常不理想。
结合整体道床结构特点可以得出,一体化的轨道板由于材料的高度一致,导致在图像中呈现出的灰度具有连续性,变化极不明显,扣件虽然是金属材料制成,但在工作中不产生摩擦,无法形成类似于钢轨顶端通过与车轮相互滚动及滑动共同作用下产生的一条连续的光带。由于工作环境下灰尘等污染,扣件与轨道板之间的过渡边缘色差较小,未出现灰度阶跃性变化。
对于扣件定位,在平衡运算量、运算速度和保证后续工作如扣件状态识别时的准确率等方面后,需求的边缘精度并不高,不必严格按照扣件外轮廓精准确定扣件位置,能够大致确定扣件位置,定位至距离扣件轮廓3~5 cm甚至更远距离都可接受。
综上所述,Sobel算子在对精度要求不非常高时,能够提供较为精确的边缘方向信息,在此选择Sobel算子进行边缘检测较为合适。
3.4 对预处理后的图像进行投影
投影分为垂直投影及水平投影。对灰度图像进行投影,可以通过观察灰度极值确定被检测出的明显边缘在图像中对应的像素位置,投影结果见图6。

图6 灰度投影结果
结合Sobel边缘检测后图像可以看出,垂直投影图中位于 1 000 像素位置的极点对应的是边缘图中钢轨的亮面位置,左右两极点分别对应边缘图中轨道板反光明显、灰度值发生阶跃性变化的左、右边缘;水平投影图中灰度没有出现明显的极值点,变化没有规律性,与边缘图中扣件与轨道板间灰度变化并不明显的信息相符合。
由此可得,在整体道床上进行扣件定位时可以舍弃水平投影这一步,直接通过将图片灰度投影至y轴确定钢轨位置。
3.5 确定扣件位置
通过灰度图像投影后可以确定钢轨的像素位置,为确定扣件位置找到了一条垂直坐标轴,但是水平方向上的扣件位置无法通过投影确定。但随着科技的进步,新型轨道巡检仪搭载的高清线阵图像扫描模块具备了动态采集功能,可在动态条件下对轨道及周边表面状态进行连续图像采集,即拍摄的前后图像可以无缝拼接。
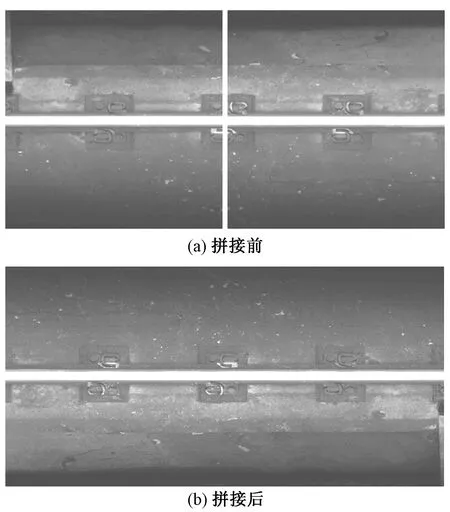
图7 图像拼接前后
在北京地铁某线现场拍摄的图像组中相邻的2幅图像见图7(a),将2幅图片连接后见图7(b),2幅图在连接处被拼接完整,在拼接处没有出现位置偏差。
利用新型巡检仪此特点,结合钢轨这一垂直坐标轴,基于扣件安装间隔距离相同这一背景,在利用扣件先验信息确定首对扣件位置之后,就可以将定位区域往后依次移动,从而确定所有扣件位置,见图8。
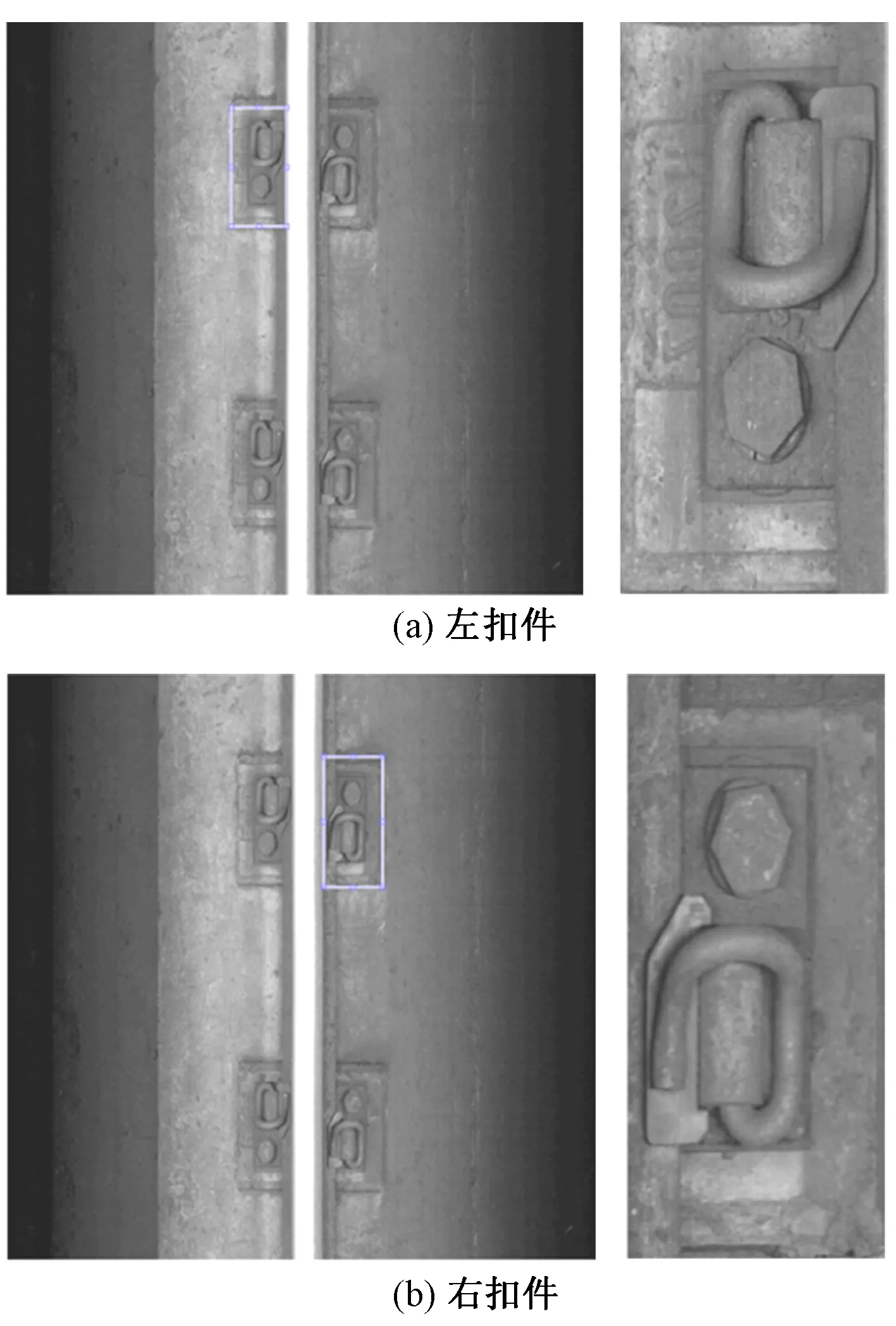
图8 扣件定位
通过测量、计算,可得本组图片中扣件安装位置间隔为 2 160 像素,按照此间隔定位并提取的扣件见图9。
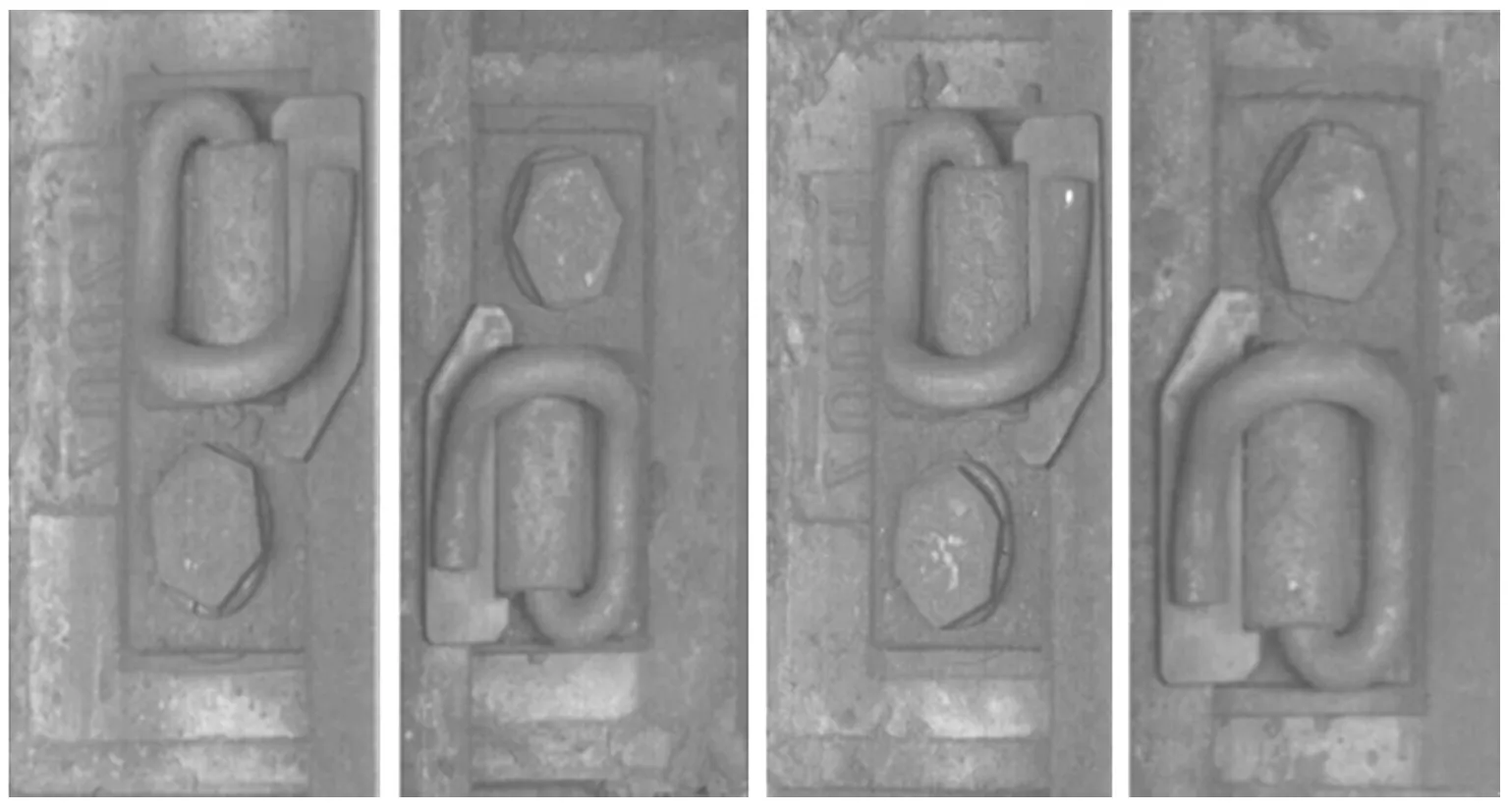
图9 扣件定位试验结果
提取的图像可以明显反映出扣件区域已被准确定位,未出现扣件被截断、遗漏等现象。
4 结论
扣件定位是利用图像自动识别技术检测铁路扣件完好性的重要步骤,可以有效去除图像中的无效信息,有效提高后续工作例如扣件提取、扣件分类等的成功率及效率。主要结论如下:
1)在定位环节可以通过合理压缩图片大小来降低图片运算量,提高图片处理效率。
2)扣件定位所要求的边缘精度并不高,不必严格按照扣件外轮廓精准确定扣件位置,可以定位至距离扣件轮廓3~5 cm,Sobel算子在对精度要求不非常高时,能够提供较为精确的边缘方向信息。
3)在整体道床上进行扣件定位时可以直接通过将图片灰度投影至y轴确定钢轨位置。
4)利用新型巡检仪的动态采集功能,结合钢轨这一垂直坐标轴,可以准确定位所有扣件位置。
试验结果表明,该方法能够较好地过滤图像中的噪声,有效提取地铁整体道床上的扣件,具有较高的效率及准确率。
猜你喜欢
铁道建筑(2022年7期)2022-08-06
军事文摘(2022年8期)2022-05-25
铁道建筑(2022年4期)2022-05-10
铁道勘察(2022年2期)2022-04-19
中国铁路(2022年5期)2022-01-01
铁道学报(2021年8期)2021-09-09
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
铁道建筑技术(2020年11期)2020-05-22
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
