
基于磁力矩器的GEO卫星角动量卸载方法
2019-07-22 00:48:14郭建新郭廷荣高益军
空间控制技术与应用 2019年3期
韩 冬,郭建新,郭廷荣,高益军
0 引 言
低轨小卫星常用磁力矩器与地球磁场相互作用产生力矩,用于卫星的角动量卸载和姿态控制.LEO轨道的地球磁场强度较大,一般为20 000 nT左右,使用小型的磁力矩器就可以产生10-4N·m~10-3N·m的力矩.对于太阳同步轨道,卫星对地定向状态下的地磁场强度周期变化的,可以通过选择合适的位置开启磁力矩器产生合适力矩进行角动量卸载[1]或者使用三轴磁力矩器进行姿态控制[2].对于高轨卫星,由于地球磁场较弱,一般不使用磁力矩器.然而高轨卫星受到的干扰力矩以太阳光压力矩为主,量级一般小于10-5N·m,若采用磁力矩器进行角动量卸载,也可以避免使用推力器卸载时对轨道产生的影响,当对卫星轨道的预报精度要求较高时,可以采用磁力矩器进行角动量卸载.
1 静止轨道的磁场
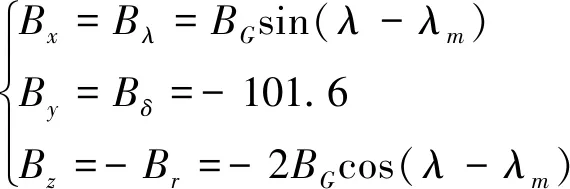
对于地球静止轨道卫星,地理纬度δ为小量,对IGRF地磁场模型取前两阶,并做简化如下:

式中,Br为径向的地磁场分量,Bλ为地理经度方向的地磁场分量,Bδ为地理纬度方向的分量,

式中,R0为地磁半径,a是GEO轨道的半长轴.


地磁场在GEO卫星轨道系分量可以近似为

基于该磁场模型,磁场方向主要在沿Y轴,卫星就不在Y轴安装测力矩器.Z轴的磁力矩器产生的Y方向力矩较小.X轴磁力矩器对Y轴的卸载能力更强.
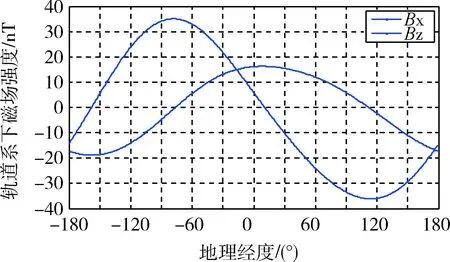
图1 地磁场的XZ分量与定点地理经度的关系Fig.1 The relationship for X/Z components ofmagnetosphere and longitude
GEO的磁场由于高度较高,易受太阳风导致的磁暴事件的影响.当强磁暴发生时,磁层顶部由于受到高速太阳风的剧烈挤压而被压缩到地球同步轨道之内,发生同步轨道磁层顶穿越事件.此时不仅会因所处的磁场环境发生变化而影响姿态,还会因为失去了磁场的保护而使卫星直接受到太阳风的冲击.更加精确的描述静止轨道位置处的磁场可以采用Tyganenko模型[3-4],这个模型是结合磁场观测资料和一定的物理考虑建立起来的半经验模型,模型甚至能够近似磁暴期间的磁场变化情况[5].但是该模型比较复杂,难以用来进行磁卸载策略的设计.这里根据美国GOES卫星磁强计的测量结果[6],验证上述近似磁场强度度的正确性.图2为GOES14和GOES15卫星测量的2019年6月11日至6月13日的磁场强度值.可以看到明显的天周期特性,但是其平均值与上述近似模型的结果都在100 nT左右.磁力矩器工作时产生的力矩也很小,需要靠长时间的积累来产生角动量,磁场强度的周期性变化对积累角动量的影响较小,因此上述近似模型可以用于磁卸载的策略的计算.

图2 GOES14和GOES15卫星在轨测量的地磁场强度Fig.2 Magnetometer measurements ofGEOS 14 and GEOS 15
2 磁卸载方法
GEO卫星的干扰力矩具有轨道周期特性,周期变化的角动量可以由动量轮吸收,是不需要卸载的.只有长期积累的角动量需要卸载.因此,可以每天进行一次卸载规划,根据当前需要卸载的角动量确定后续一天的卸载计划.
若沿卫星的X轴安装磁力矩器,其产生的本体系的力矩为:
[M0 0]T×[BxByBz]T=
[0 -MBzMBy]T
其中M为磁力矩器的磁矩.
Z轴的磁力矩器产生的本体系的力矩为:
[0 0M]T×[BxByBz]T=
[-MByMBx0]T.
假定X轴磁力矩器的磁矩为400 Am2,磁力矩器工作,产生的Y轴力矩约为1.2×10-5N·m,产生的Z轴力矩约为4.0×10-5N·m.累计一天,Y轴每天最大卸载能力为1.0 N·m·s,XZ平面内每天的最大卸载能力为2.2 N·m·s.但两个方向的卸载能力不可能同时达到最大值.
下面对磁棒的卸载开关控制律进行推导.忽略姿态偏差、轨道倾角的影响,沿卫星星体X轴方向安装的磁力矩器产生的力矩在惯性系为:
沿卫星星体Z轴方向安装的磁力矩器产生的力矩在惯性系为:

式中,α是卫星的赤经,此处所述的惯性系与卫星过春分点时刻的轨道系重合.X轴磁力矩器和Z轴磁力矩器产生力矩相比,在XZ平面内大小相同,仅在相位上差90°.Y方向产生的力矩分别与Bz和Bx有关.
从上式可以看出,Y轴需要卸载的角动量能够唯一确定磁力矩器正向通电还是负向通电,两个磁力矩器在Y方向上的力矩大小分别与Bz/Bx相关.在此基础上,可以选择磁力矩器工作的“赤经”来满足XZ方向的卸载力矩需求.X/Z两个磁力矩器在XZ平面上的力矩相同,只是相位相差90°.因此下面基于X轴磁力矩器单独工作,对卸载方法进行讨论.
磁力矩器采用开关设计,只要开启,其产生的磁矩就是最大磁矩.每个磁力矩器有正向通电、反向通电和关三种状态.通过调节开关时间,可以得到需要的力矩和角动量累积量.设磁力矩器在开启时刻的相对赤经为αON,关闭时刻的相对赤经为αOFF,则对X轴磁力矩器惯性系下的力矩进行积分得到磁力矩器工作产生的角动量为:
其中ωe为地球自转角速度.
设当前需要卸载的角动量为ΔH=[ΔHxΔHyΔHz]T.将X轴和Z轴的产生的卸载角动量分别与需要卸载的角动量相反,得到XZ平面的卸载方程:


其中arctan2(y,x)函数表示反正切函数,但其结果的取值范围为[-π,π).
将Y轴产生的卸载角动量与所需卸载角动量相反,得到Y轴方向的卸载方程:

首先,根据ΔHy确定磁力矩器的正负通电状态:
然后,根据XZ平面内的角动量卸载方程可以得到:
或
两组解分别对应磁力矩器工作时间小于半圈和大于半圈.为了兼顾Y轴的卸载,可以从两个解中选出对Y轴卸载较为有利的一组解.对两组解分别计算卸载完成后Y轴剩余的“角动量”即|αOFF-αON-2αy|,并取该值较小的一组解.
磁力矩器第一次通电弧段:
磁力矩器第二次通电弧段:


综上所述,磁力矩器每天的工作模式有四种,如图3所示.模式A和模式B均为一次通电,模式A的通电时间小于半个轨道周期,模式B的通电时间大于半个轨道.模式C和模式D均为正负两次通电,模式D的两次通电各半个轨道周期,模式C第一次通电时间为半个轨道周期,第二次通电随时间小于半个轨道周期.
这四种模式下,对XZ平面和Y方向的卸载能力是不同的.图4给出了在两个磁力矩器同时工作的情况下的卸载能力范围、卸载工作模式的对应关系.每一天的磁卸载产生的角动量对应图中模式A/B/C/D曲线上的某一点.坐标横轴和纵轴表示每天的干扰角动量累计量.当干扰角动量在模式B和模式C两条线围成区域以下时,磁卸载能自动在四个模式之间自动切换,完成三轴角动量卸载.在模式B/C两条线以上区域时,只有XZ方向的角动量可完全卸载,Y方向的角动量将逐渐累积.当每天累计角动量在D区时,两个方向的角动量都不能完全卸载,都将逐渐累积.当每天累计角动量在D区时,会出现卸载模式始终在D模式下运行.此时XZ平面内卸载较多,Y方向不进行卸载.Y方向也有可能累计较快.此时可以通过引入XZ平面内的卸载比例系数kxz,使得XZ平面内在一圈内可以卸载量为kxzαx和kxzαz,同时对Y轴又产生了一定的卸载作用,这样可以调节三轴角动量的增长速度.图中左上角的四个圆点表示某GEO卫星在光压力矩作用下每天的角动量积累量,在不同的季节有不同的值.四个点均在区域B中,说明磁力矩器可以实现卸载,并且一般都工作在模式B下.
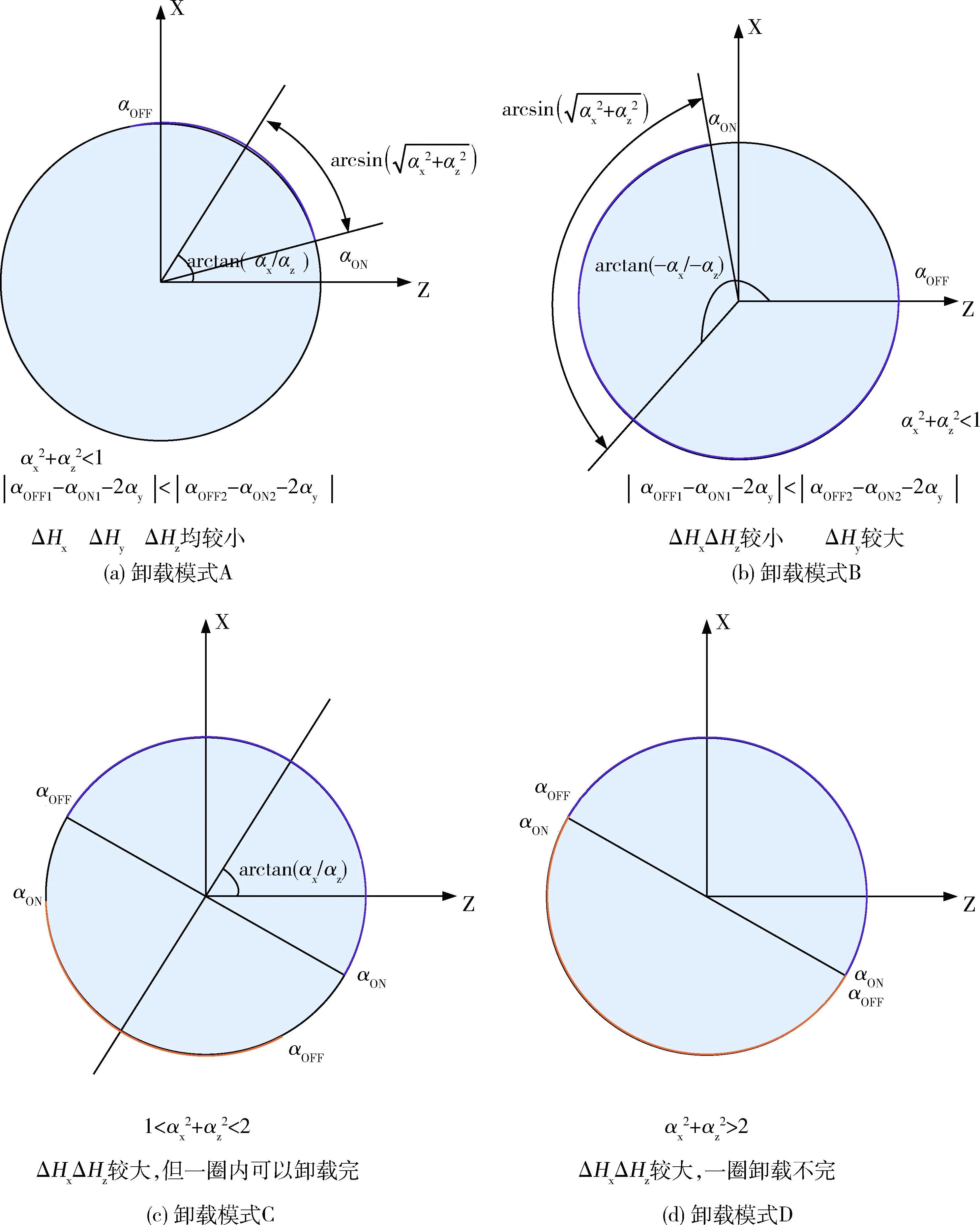
图3 四种角动量卸载工作情况示意图Fig.3 Four kinds of angular momentum unloading modes
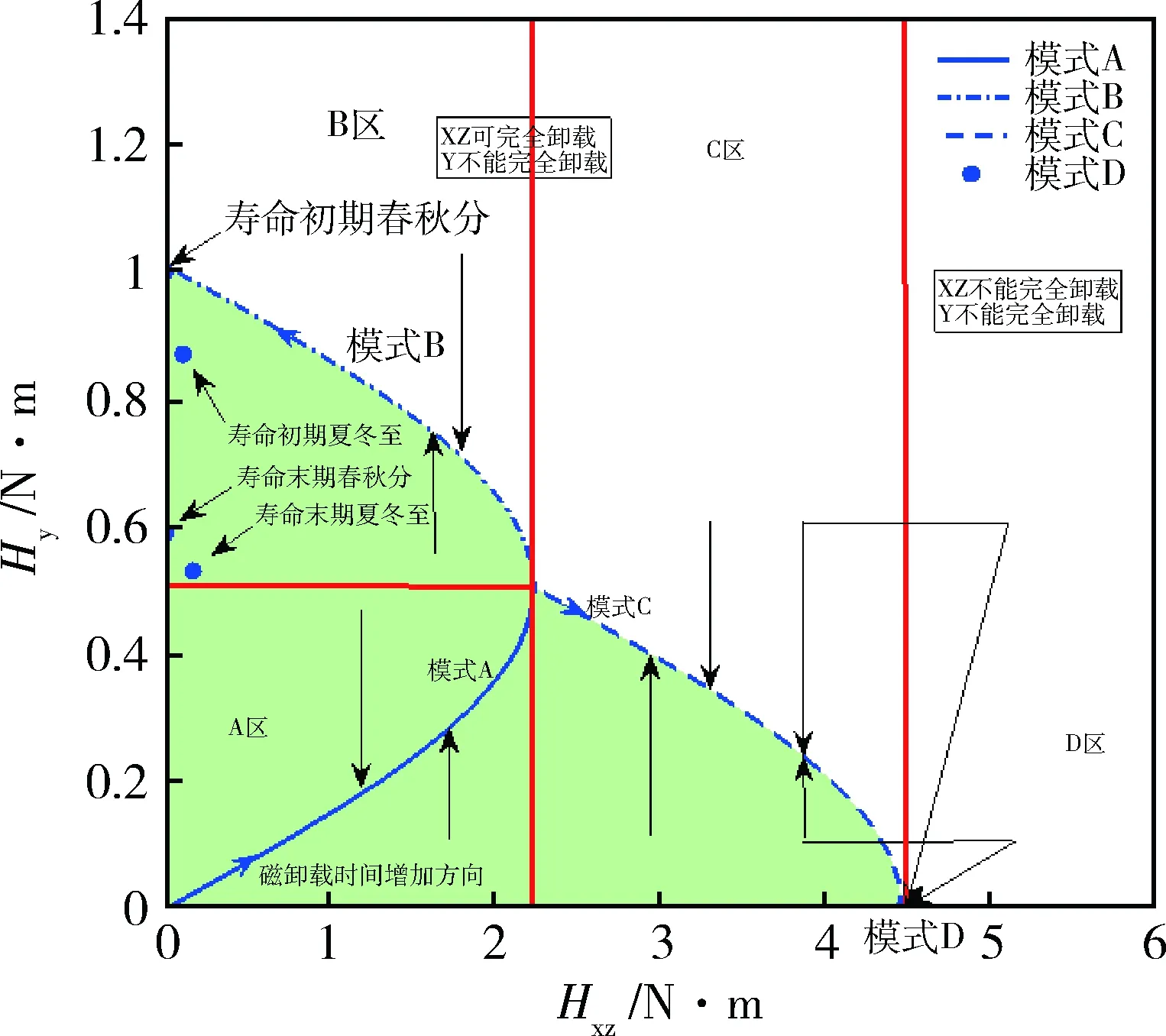
图4 卸载工作区域划分和能力范围Fig.4 Unloading region and unloading scope
3 磁卸载策略仿真
使用以上的卸载策略进行仿真.仿真中,卫星在每天的固定时间进行磁卸载策略计算,根据当前的角动量进行下一次卸载规划.随后的一天中,按照计算结果控制开关磁力矩器.一天后,再根据当时的卫星三轴角动量重新计算卸载策略.
3.1 仿真算例一
卫星本体系下光压力矩包含常值项和周期项,即以下的形式:
Ti=T0+T1icos(u-u0i),其中i=x,y,z
由于是在卫星本体下表示的力矩,其在角动量积累上影响三轴是不同.对于Y轴,常值项引起角动量积累,周期性引起角动量周期变化;对于X轴和Z轴,常值项引起角动量周期变化,周期项引起角动量积累.
仿真算例一的三轴常值项为[0.5 5 0.5],三轴周期项为[10 22 -10],干扰力矩的单位为10-6N·m.在这种设置下,卫星Y轴角动量累积较快.从图6磁力矩器工作弧段看,其工作模式在A和B之间切换,大部分时间工作在模式A,每隔1~2天出现一次模式B.

图5 仿真算例一角动量变化情况及磁力矩器产生的卸载力矩Fig.5 Angular momentum and the torque madeby magnetorquer of example 1

图6 仿真算例一磁力矩器工作弧段Fig.6 Magnetorquer work arc for example 1
3.2 仿真算例二
仿真算例二的三轴常值项为[0.5 5 0.5],三轴周期项为[40 22 -40],干扰力矩的单位为10-6N·m.在这种设置下,卫星三轴角动量累积较快.当kxz=1.0进行仿真发现磁力矩器始终工作在模式D,导致Y角动量增长较快.将XZ卸载比例kxz设置为0.8,仿真结果如下图所示.磁力矩器工作模式大部分都是模式C.XZ平面内的角动量和Y轴的角动量增长速度比较均匀.仿真60天,XZ平面内的角动量增加到27 N·m·s左右,Y轴角动量增长到13 N·m·s左右.
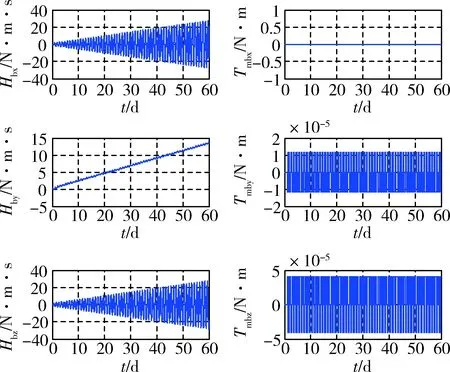
图7 仿真算例二角动量变化情况及磁力矩器产生的卸载力矩Fig.7 Angular momentum and the torque madeby magnetorquer of example 2

图8 仿真算例二磁力矩器工作弧段Fig.8 Magnetorquer work arc for example 2
4 结 论
针对GEO卫星使用磁力矩器进行角动量卸载问题,首先基于近似的地磁场模型分析了同步轨道上磁场的特征.由于地球静止轨道的地磁场强度基本为常值,磁卸载方法与低轨卫星有较大的差别.根据开关式磁力矩器产生力矩的特点,设计了GEO卫星的磁卸载方案.对于中国上空的GEO卫星,采用一个沿卫星X轴安装的磁力矩器,对赤道平面内(XZ平面)的角动量和南北极方向(Y方向)的角动量有四种卸载工作模式.星上每天根据星体角动量积累情况,计算下一天的磁力矩器开关机时间,可以有效的兼顾这两个方向的卸载,从而实现卫星三轴角动量卸载.
猜你喜欢
大学物理(2022年8期)2022-09-15 05:35:44
海洋通报(2020年2期)2020-09-04 09:22:26
成长·读写月刊(2019年1期)2019-01-28 17:53:46
成都信息工程大学学报(2018年4期)2019-01-23 06:57:32
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
探测与控制学报(2015年4期)2015-12-15 15:00:56
新乡学院学报(2015年6期)2015-11-06 08:04:55
