
基于多重UKF的粗太阳敏感器标定算法研究
2019-07-22 00:49:22张银,韩冬,胡迪
空间控制技术与应用 2019年3期
张 银,韩 冬,胡 迪
0 引 言
粗太阳敏感器(简称粗太敏)由多个电池片组成的模拟式太阳敏感器,其具有结构简单,质量轻,体积小,空间视场大等优点,因而在一些卫星项目上得到广泛使用.但作为具有大视场的光学器件,粗太敏存在易受杂光干扰,测量精度较低等缺点.文献[1]对皮卫星上使用粗太敏进行了姿态估计和标定算法研究,但其采用EKF算法进行姿态估计,对卫星动力学方程和粗太敏模型进行了线性化处理,没有考虑杂光干扰模型的非线性特点.文献[2]对低轨卫星的地球反照情况进行分析,并针对此种干扰采用磁强计对粗太敏进行了干扰分析较正.由于磁强计本身的测量精度有限,因此其对粗太敏的较正精度也不高,另外对于地球同步轨道卫星来说,粗太敏安装背离对地面,因此在轨运行后地球的反照对其的影响几乎可以忽略.
UKF(unscented Kalman filter)是一种非线性滤波器,可以对非线性系统进行滤波.如文献[3]采用UKF对微小卫星进行姿态确定算法研究,并建立了卫星入轨后的几种工作模式.文献[4]采用自适应UKF对MEMS陀螺进行空中在线标定,最后从姿态确定的角度可以看出,其动态误差小于2°,提高了MEMS陀螺的精度.
考虑粗太敏杂光干扰模型的非线性特点以及提升测量精度,本文采用星敏感器和UKF算法实现对在轨陀螺漂移误差的估计,进一步对粗太敏进行实时标定.由于粗太敏是多电池片结构,采用UKF标定时,需要对粗太敏的每一片电池片进行了滤波估计.本文采用多重UKF联合滤波结构,第一重滤波器完成对陀螺漂移估计,第二重滤波器实现对粗太敏每一块电池片的估计,最终实现姿态确定.
1 数学建模
1.1 卫星运动方程
考虑带有动量轮的卫星动力学方程如下所示:

式中I是卫星的惯量矩阵,ω=[ωxωyωz]是卫星本体角速度,h是动量轮的角动量,Tc是卫星控制力矩,在此指喷气控制力矩,Td是光压等其他外力导致的干扰力矩.
采用四元素描述的卫星运动学方程如下所示:

1.2 广义罗德里格参数
广义罗德里格参数(generalized rodrigues parameters,GRPs)定义为[5]

q13=b-1(a+q4)ρ(4)
式中,a,b都为标量.当a=1,b=4时,则在小角度误差的情况下,GRPs误差幅值‖δρ‖2就等于姿态误差角φ.这种误差表示的优点是,当δρ作为状态变量,则估计结果无需转化,即可近似欧拉角.其中q13为四元素矢量部分,q4为四元素的标量部分,其满足约束方程‖q‖2=‖q13‖2+‖q4‖2=1.
误差广义罗德里格参数定义为
其中,δq=[δq13δq4]为误差四元数.
1.3 陀螺测量方程
陀螺测量干扰由两部分组成,第一部分是陀螺的漂移误差,第二部分是噪声干扰,因此陀螺测量方程表示如下:
ωgyro=ω+b+d(6)
式中,ω是真实的卫星惯性角速度,b为陀螺的漂移误差,d~N(u,σ)为噪声干扰服从高斯分布.
1.4 粗太敏的测量方程
GEO卫星的粗太阳敏感器一般安装在卫星-Z面(背地面)用于滚动姿态和俯仰姿态的测量,其构型设计如图1所示,其中1、2、3、4电池片的法线与5电池片法向夹角β均为45°,5电池片法向与卫星本体Z轴夹角180°.
五个电池片的理论测量值分别为:
式中Sx、Sy、Sz为太阳矢量在粗太阳敏感器本体坐标系下的单位矢量.其中2片以上电池片即可完成卫星姿态的计算,以1、2、5电池片为例,其定姿算法为:
GEO卫星粗太敏的干扰源主要有两部分,一部分是490 N支架反光,另一部分是卫星表面的多层包覆,其电池片的测量方程可表示如下:
ICSS=Imaxcosα+I490 Ncosβ+Iothercosγ(11)
式中ICSS表示粗太敏实际测量电流值,Imax为粗太敏受太阳光照射时产生的最大电流值,α为粗太敏电池片法线与太阳光线的夹角,I490 N是490 N支架反光对粗太敏电池片的影响产生的电流,β为反射光与电池片法线的夹角,Iother为多层包覆反照光对粗太敏电池片产生的电流,γ为反照光与电池片法线夹角.Imax,I490 N,Iother定义为电池片输出的模型参数,以Icss1,Icss2,Icss3表示,此时电池片的输出为:
Icss=Icss1cosα+Icss2cosβ+Icss3cosγ(12)
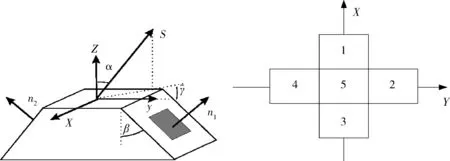
图1 粗太阳敏感器结构图示意图Fig.1 The structure of coarse sun sensor
1.4 星敏测量方程
星敏感器利用拍摄到的星图确定其光轴在惯性空间中的瞬时指向,从而确定卫星的姿态.由星敏感器输出参数可得到载体坐标系相对于惯性坐标系的四元数.则星敏感器测量方程的等效四元数模型为:


2 标定算法设计
2.1 多重UKF标定算法
采用UKF的标定算法分两部分,一部分用于对陀螺漂移进行估计,一部分用于对粗太敏的标定,总体算法结构如下:
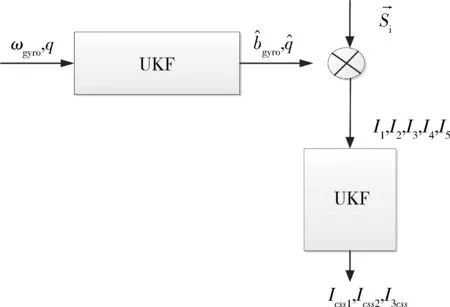
图2 多重UKF标定算法示意图Fig.2 The calibrate algorithm based on multi-UKF method
2.2 UKF滤波算法
直接采用误差修正罗德里格参数表示卫星姿态运动学方程,可能会使计算量增大和复杂度增加.因此在滤波算法在采用四元数进行运动学方程求解,并且始终保持四元数的归一化.
对于第一重UKF估计陀螺漂移并进行姿态预估,其状态量为
x=[δρb](14)
其中ΔP为误差广义罗德里格参数,b为陀螺漂移测量.
对于第二重的UKF标定粗太敏的电池片参数,其状态量为
xI=[I1css1I1css2I1css3I2css1I2css2I2css3…
I5css1I5css2I5css3](15)
式中I1css1,I1css2,I1css3,…,I5css3为五个电池片的侍估参数,参数为常值.
对于第一重UKF定义Sigma点


选取

确定一步预测值:

从而可解算出

陀螺常漂的一步预测值为
根据样本点计算状态均值和方差

测量更新
观测均值和方差

互相关方差的计算公式为

3 仿真结果分析
3.1 仿真工况
经过多种工况的仿真,当粗太敏测量数据在其视场内的分布不均匀时,标定结果会出现较大偏差,这是由于标定模型与多个光照角度相关,而测量数据没有很好的覆盖不同阳光角度.如果设定太阳方向在粗太敏视场内变化较大,此时粗太敏采样的数据在其视场内的分布较为均匀,就可以实现电池片多个系数的标定.
多重UKF在滤波估计过程中需要用到太阳矢量,因此定义仿真时间为北京时间2012年7月26日8:00,仿真卫星的轨道参数为(a,Ω,ω,i,e,f)=(42 126,0,18,0,0,100),卫星姿态初始状态是对日定向,粗太敏正对太阳,仿真中采用姿态轨迹规划,使太阳方向在粗太敏视场中呈现螺旋扫描形式,太阳方向与粗太敏的夹角从0°逐渐增大到50°.从而卫星在空间是翻滚状态,仿真时间20 000 s,滤波周期1 s.当某个粗太敏电池片不可见太阳时,不对其系数进行标定.粗太敏电池片的模型系数设置见下表.

表1 粗太敏电池片的仿真模型系数Tab.1 The simulative coefficient of battery piece of CSS
3.2 陀螺标定结果分析
陀螺进行角速度测量,由于存在陀螺漂移,采用UKF对其进行估计,从而为粗太敏标定提供更为准确的姿态四元数,陀螺标定结果如图3所示,图中只画出了前200 s的仿真结果,到60 s时,陀螺标定趋于稳定.
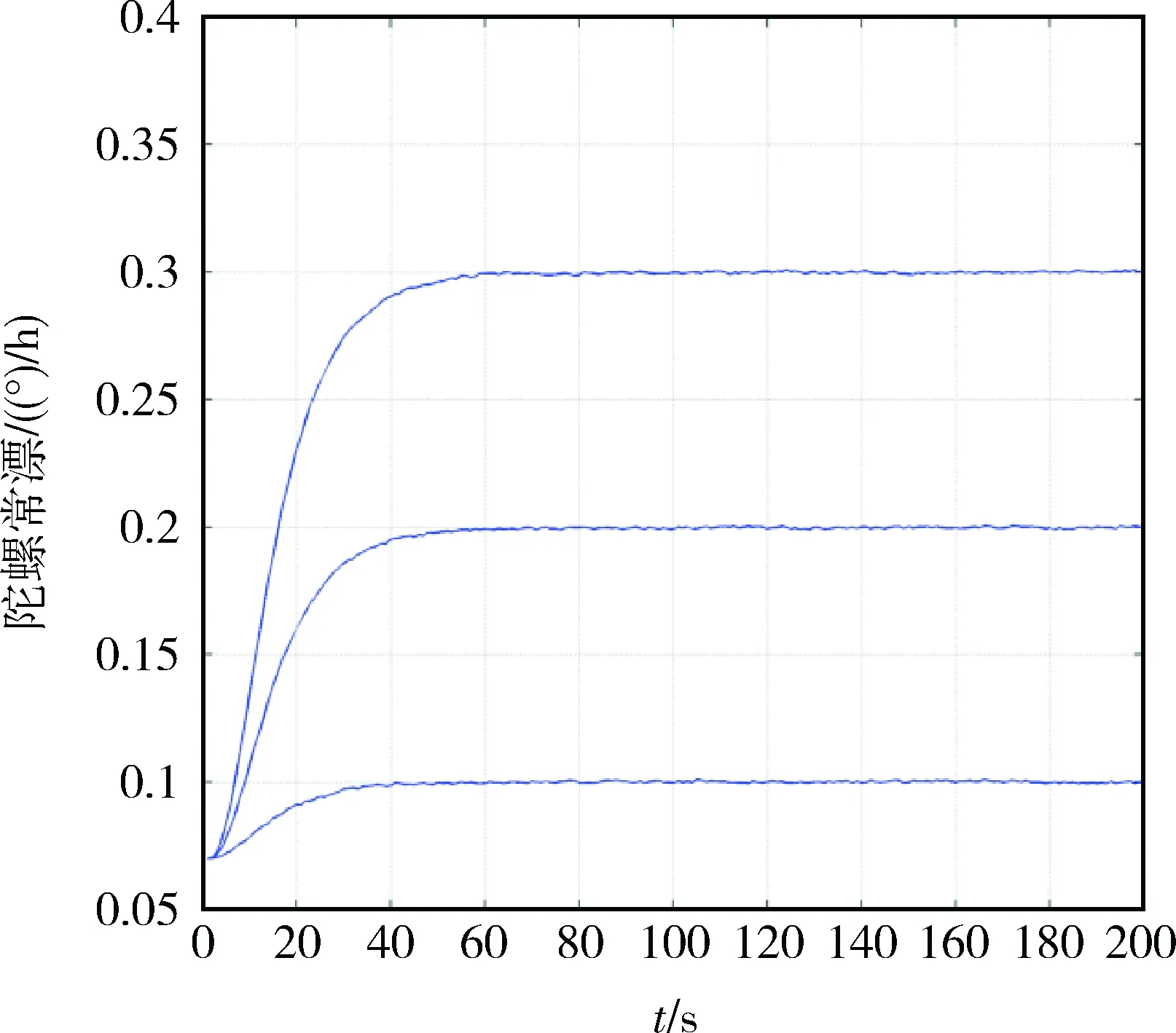
图3 三轴陀螺常漂标定结果Fig.3 The calibrate result of gyro drift
3.3 粗太敏标定结果分析
对五个粗太阳敏感器电池片的模型系数标定结果如下图.在仿真设置的姿态轨迹规划情况下,太阳方向在粗太敏视场范围内出现的角度较为随机且均匀.滤波过称中,电池片不见太阳的情况下,标定系数维持原值.

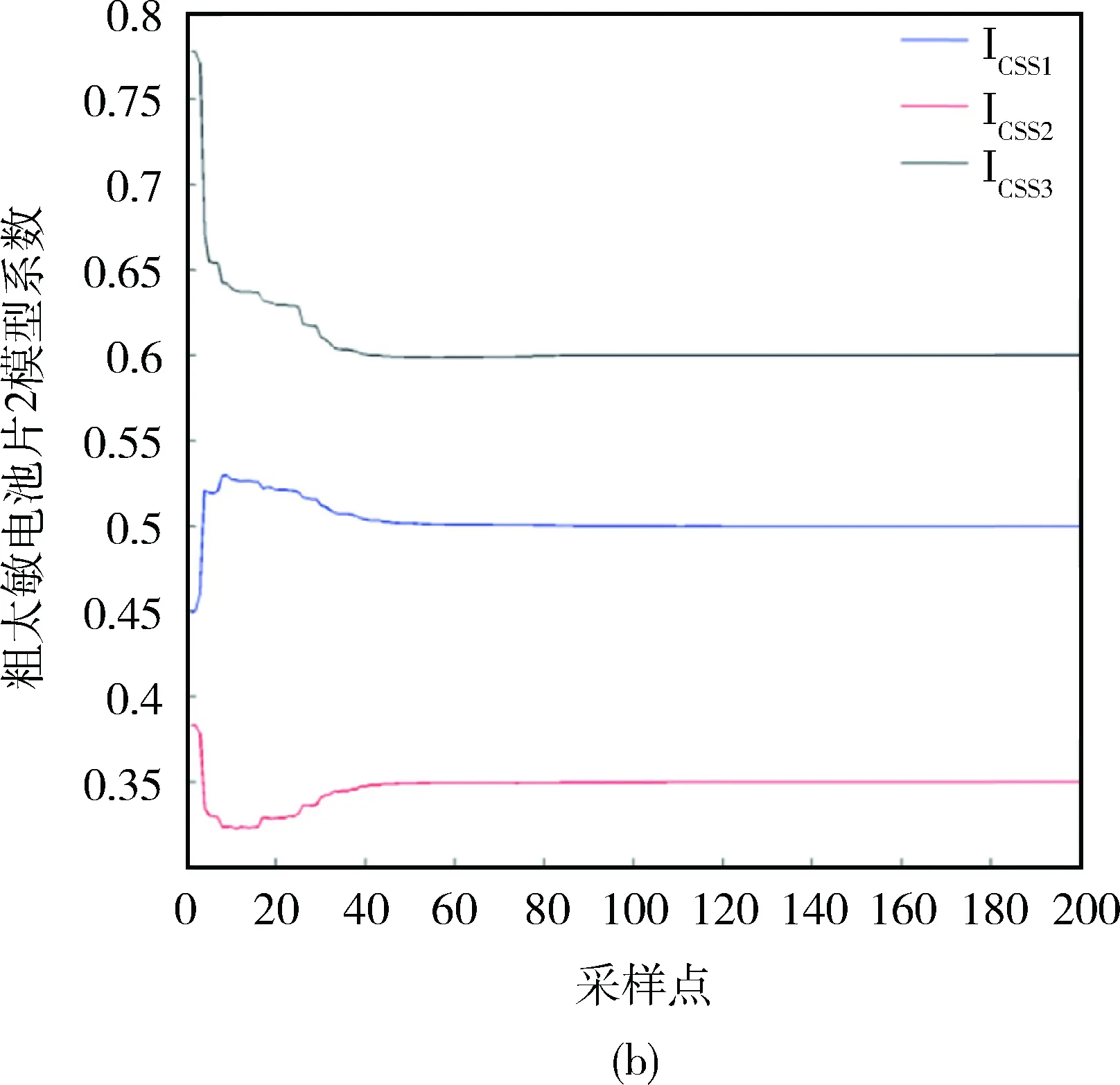
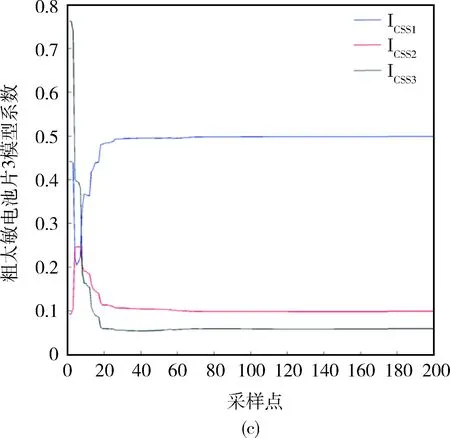
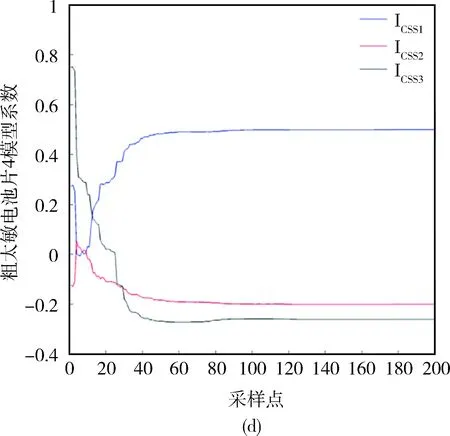
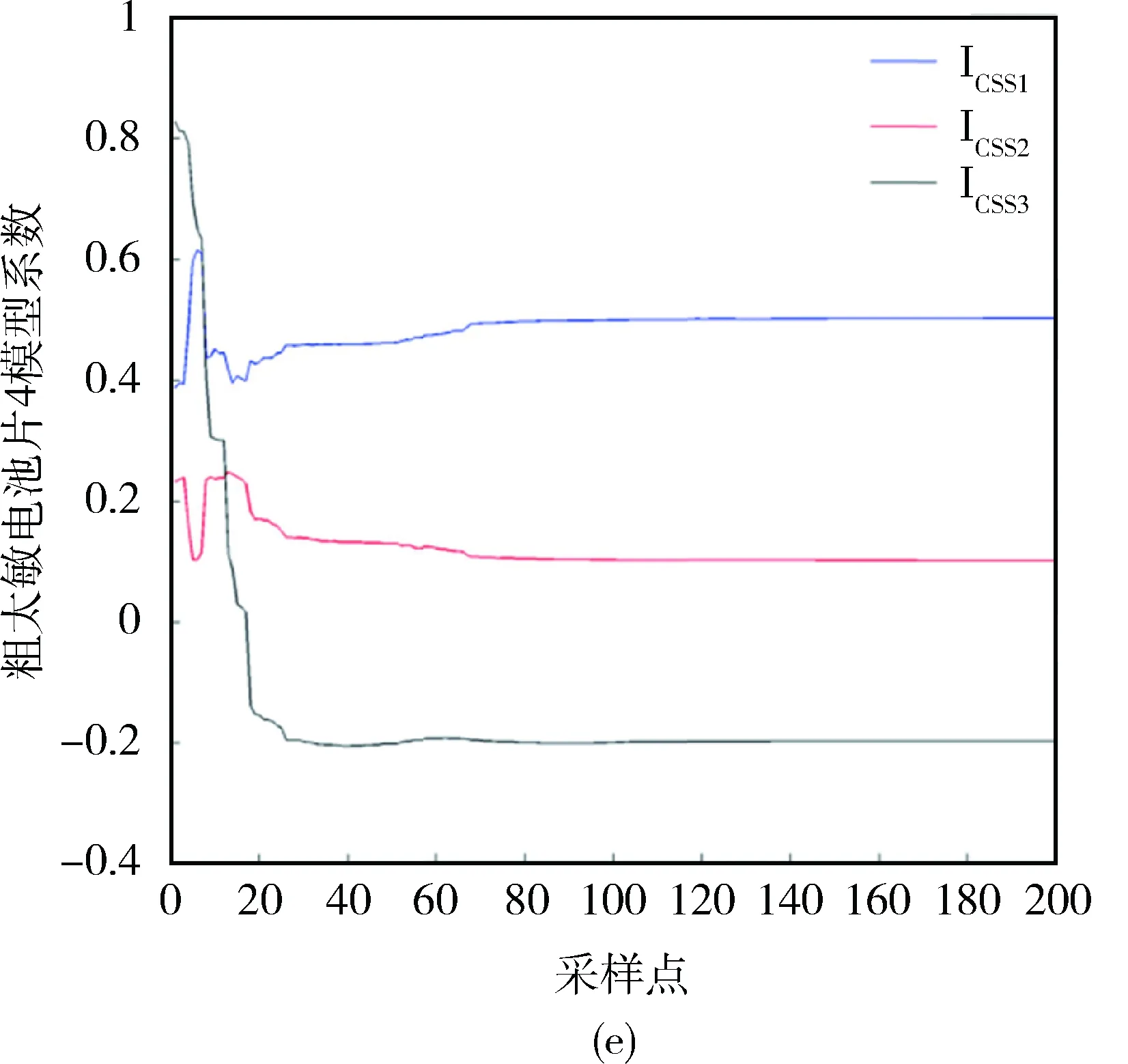
图4 粗太阳敏感器电池片的模型系数标定结果Fig.4 The calibrate result of battery piece of CSS
从图4中可以看出使用多重UFT标定算法,在规划好的姿态巨动轨迹下可以获得较为精确的标定结果.
4 结 论
本文采用多重UKF方法实现了对陀螺漂移标定和粗太敏的标定,通过仿真结果证明,陀螺漂移可以快速完成标定,从而借助陀螺标定结果,修正粗太敏电池片系数.电池片系数标定结果取决于太阳在粗太阳敏感器视场中方位分布情况,当分布较为均匀时,标定结果较好.
猜你喜欢
学生天地(2020年3期)2020-08-25 09:04:16
汽车维修与保养(2020年11期)2020-06-09 05:42:16
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
快乐语文(2018年36期)2018-03-12 00:56:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
