
浅水效应对船舶的影响及经验估算方法
2019-07-10 07:14张伟
船舶与海洋工程 2019年3期
张 伟
(上海惠生海洋工程有限公司,上海 201210)
0 引 言
对于在浅海、内河和港口等浅水区域航行的船舶而言,浅水效应是普遍存在的现象。以往的船舶因尺度较小、航速相对较低,浅水效应一般没有给其安全航行和操纵性带来特别大的影响,因此浅水效应没有引起普遍关注。
近几十年来,随着经济全球化的迅猛发展,国际货运需求量不断增加,船舶逐渐朝大型化和快速化方向发展。在此情况下,船舶在港口等浅水区域遭受的浅水效应越来越显著,不仅影响其安全航行和操纵性,而且对其功率和经济性有重要影响。由此,浅水效应得到港口、航道相关方和船东等越来越多的重视。
1 浅水效应
对于存在浅水效应问题的航道,通常根据航道的特点将其分为2类:对于仅水深受限制的航道,称其为浅水航道,如浅海区域和湖面宽广的湖泊等;对于水深和宽度都受限制的航道,称其为限制航道,如内河和运河航道等。
由于航道尺寸的限制,船舶在浅水航道或限制航道中航行时会出现下沉及纵倾变化、阻力增加和操纵性变差等现象。本文主要对下沉及纵倾变化和阻力增加这2种浅水效应进行分析。
1.1 下沉和纵倾变化
当船舶在深水中航行时,船体周围的水流呈三维空间的流动;当船舶在浅水航道或限制航道中航行时,由于航道受限,船体周围的水流因受到挤压而加速流动,由伯努利方程可知,船体周围的流体压力会随之减小,从而导致船舶下沉。
此外,由于艏、艉的形状不同,艏、艉压力场的分布和变化情况也不同,从而导致船舶在下沉的同时发生纵倾变化。船舶的纵倾发生变化通常与船舶的初始纵倾和方形系数CB有关。BARRASS[1]根据船模试验和实船观测结果得出以下结论。
1) 对于初始纵倾为0的船舶:当CB> 0.7时,艏倾;当CB< 0.7时,艉倾;当CB= 0.7时,无纵倾变化。
2) 对于初始纵倾不为0的船舶:当初始状态为艉倾时,艉倾加剧;当初始状态为艏倾时,艏倾加剧。
这种以CB= 0.7为分界描述船舶纵倾问题所得结论在工程上是不恰当的,但可为定性描述纵倾的变化情况提供参考。总体来说,根据伯努利方程,当水流速度增大时,船体周围水流的压力会相应地减小。因此,可根据该原理认为浮心位置在船中前时船舶可能发生艏倾,浮心位置在船中后时船舶可能发生艉倾,这与BARRASS[1]的结论是一致的。
1.2 阻力增加
船舶在浅水航道或限制航道中航行时会出现下沉和纵倾变化的现象,同时船体兴波作用会增大,导致船舶受到的阻力比在深水中大。随着浅水效应的加剧,这种现象通常会更加明显。
1) 黏性阻力。船舶在浅水航道或限制航道中航行时,由于船体周围水流的速度增加,同时船舶下沉导致其湿表面积增大,使得船舶受到的摩擦阻力比在深水中航行时受到的摩擦阻力大。此外,由于船体周围的水流与船体的相对运动速度增大导致压力减小较快,船体表面形成较大的压力梯度,因此黏压阻力也有所增大。
2) 兴波阻力。通过船模试验和实船观测发现:在浅水区域航行的船舶遭受的阻力先随着航速的增加而急剧增大,然后从某个特定的航速点开始随着浅水效应的加剧(航速继续增加或吃水继续下降)而从阻力峰值降下来。该现象与波浪理论对浅水效应的分析中描述的现象基本一致,主要是由兴波阻力变化引起的。
影响兴波阻力的主要参数是水深弗劳德数FrH。根据波浪理论,通常依据FrH船速划分为3个区段[2],即:亚临界速度区,FrH< 1.0;临界速度区,FrH=1.0附近;超临界速度区,FrH> 1.0。
当船舶在亚临界速度区的浅水中航行时,其兴波阻力随着浅水效应急剧增大;当船舶开始进入超临界速度区时,其兴波阻力反常地出现减小的情况。
对于浅水效应而言,遇到的实际情况通常是在亚临界速度区航行的问题。因此,这里主要分析亚临界速度区内的浅水效应问题。
2 浅水效应发生的条件
由上述分析可知,船舶在进入浅水航道或限制航道时可能会遭受浅水效应。船模试验和实船观测结果表明:对于浅水航道,影响浅水效应的因素主要是水深和航速;对于限制航道,影响浅水效应的因素除了水深和航速以外,还有航道宽度。
2.1 水深
水深是影响浅水效应的主要因素之一,通常用水深吃水比H/T来衡量不同尺度船舶的浅水效应。国际航运协会(The World Association for Waterborne Transport Infrastructure, PIANC)[3]以H/T为参数对浅水效应进行划分,其中:深水,H/T> 3.0;中深水,1.5 <H/T< 3.0;浅水,1.2 <H/T< 1.5;超浅水,H/T< 1.2。
此外,PIANC描述了船舶在不同情况下遭受的浅水效应程度:在中深水情况下,浅水效应开始显现;在浅水情况下,浅水效应变得非常明显;在超浅水情况下,由于船底的水流几乎全部被阻滞,导致浅水效应成为船舶操纵的主要影响因素。
应指出,上述划分方式存在一定的局限性,但作为一种初步划分和定量衡量水深对浅水效应影响的方法,还是有一定的参考意义的。
2.2 航速
航速是影响浅水效应的另一个主要因素。对于同一艘船,即使水深相同,在不同航速下受到的浅水效应也是不同的。浅水效应可能在高航速下很大,而在低航速下很小或没有。对于不同船型而言,由于设计航速不同,导致其受到的浅水效应不同。由此可知,简单地采用H/T来衡量所有船型的浅水效应是不太合理的。
BARRASS[1]根据船模试验和实船观测结果,引入水深影响系数FD来描述各类型船舶进入浅水区域的时间,有

式(1)中:T为船舶吃水,m;k为与船型有关的恒定值。
不同船型对应不同的水深影响系数,其中:对于超大型油船,FD=5.68T;对于杂货船,FD=7.07T;对于客船,FD=8.25T;对于客滚船,FD=9.20T;对于利安得级巡洋舰,FD=12.04T。当船舶航行至水深小于对应于该船型的FD的水域时,已进入浅水区域,需开始考虑航速对浅水效应的影响。
上述结论很好地体现了航速对浅水效应的影响。由于不同船型的航速有所不同,其水深影响系数也不相同,因此在考虑浅水效应时除了需考虑水深的影响以外,还需考虑航速的影响。
2.3 航道宽度
对于在航道宽度受限的限制航道中航行的船舶,除了考虑水深和航速对浅水效应的影响以外,还需考虑航道宽度对浅水效应的影响。BARRASS[1]引入宽度影响系数FB来描述各类型船舶进入宽度受限区域的时间,有

式(2)和式(3)中:b为船宽,m;CB为方形系数;k为与船型有关的恒定值。
不同船型对应不同的宽度影响系数,其中:对于超大型油船,FB= 8.32b;对于杂货船,FB= 9.50b;对于沿海拖船,FB= 12.69b;对于利安德级巡洋舰,FB= 13.75b。当船舶航行至航道宽度小于对应于该船型的FB的水域时,已进入宽度受限区域,需开始考虑航道宽度对浅水效应的影响。
由上述结论可知,不同船型的宽度影响系数是不同的,这是不同船舶的航速不同导致的,再次表明航速对浅水效应有重要影响。
2.4 浅水效应发生的条件
划分和衡量浅水效应的方法有很多,根据船模试验和实船观测结果得到的统计分析结果,一般可采用H/T、FrH和B/b等3个无因次参数来判断浅水效应是否发生。当船舶遭受以下3种情况[1,3-4]之一时,就需开始考虑浅水效应是否已发生。式(4)~式(6)中:H为航道水深,m;B为航道宽度,m;T为船舶吃水,m;b为船宽,m;CB为方形系数;υ为船舶航速,m/s;g为重力加速度,m/s2。


3 浅水效应对航行安全的影响
虽然浅水效应是一直存在的,但因以往船舶的尺度相对较小,浅水效应不是很显著,对船舶的影响不是很大,并没有引起广泛重视。然而,近些年随着船舶尺度的不断增大和航速的不断提高,船舶在进入港口和航道时遭受的浅水效应越来越显著,对船舶安全航行的影响越来越大。这种影响导致海损事故(尤其是触底事故)不断发生。
3.1 触底导致案例分析[5]
1992年8月7日,载有1824名乘客和1003名船员的英国籍邮船“伊丽莎白女王2号”在航行至美国的卡蒂杭克岛附近海域时发生触礁事故。此次触礁的主要原因是礁石的存在导致当地海域的水深比海图上标记的水深浅很多。事故调查结果显示,若当时采取适当的措施,该船完全可避免触礁事故的发生。
在发生触礁事故之前,该船吃水约9.8m,礁石在水面以下约10.5m,考虑到当时有一定的涨潮现象,正常情况下该船应该能安全驶过该礁石。但是,为保证船舶准时到达下一港口,该船将航速提高到约25kn。由于该船没有提供与不同浅水效应情况下引起的下沉有关的文件,船长估计该船可能会遭受约0.5m的下沉,而实际情况是船长严重低估了浅水效应的影响。调查结果显示,该船在25kn航速下航行时可能增加了1.5m以上的下沉量(包括纵倾的影响),正是这部分被严重低估的浅水效应导致了此次触礁事故的发生。
类似“伊丽莎白女王2号”的触底事故还有很多。港口当局、船东等对此高度重视,出台了许多法规。例如,美国联邦法规第33条 (CFR33)[6]规定,对于未在整个货油舱长度范围内设置双层底的油船,船东或操船方应提供相应的船底净空隙(Under-Keel Clearance, UKC)指南。对于确保船舶安全航行和安全进出港而言,UKC是一个非常重要的概念。
3.2 船底净空隙UKC
UKC是指通航时船底与水底之间的净空隙。由于该值不仅影响船舶的通航安全,而且影响港口航道的正常运营和经济性,因此逐渐得到船东、操船方和港口等相关方的重视。船舶在浅水区域航行和进出港口时需遵循相关组织机构或港口当局的有关规定,以保证船舶安全航行和进出港。对于UKC的大小,不同组织机构有不同的建议或规定。ICORELS(International Commission for the Reception of Large Ships)[7]提供的船舶在不同海域的UKC建议值dUKC如下。
1) 开敞水域:暴露于强烈和长顺浪或艉斜浪,且航速可能比较高的区域,dUKC/T≈0.2。
2) 等候水域:暴露于强烈和长涌浪的区域,dUKC/T≈0.15。
3) 航道:暴露于强烈和长涌浪的区域,dUKC/T≈0.15。
4) 航道:较少暴露于涌浪的区域,dUKC/T≈0.10。
5) 操纵和停泊水域:暴露于涌浪的区域,dUKC/T≈0.10~0.15。
6) 操纵和停泊水域:遮蔽区域,dUKC/T≈0.07。
值得注意的是,在考虑UKC时,除了要考虑静态影响因素以外,还需考虑动态影响因素,如回航和风压引起的横倾、船舶六自由度运动等,以及浅水效应引起的下沉和纵倾。
PIANC[8]将UKC的各静态影响因素和动态影响因素划分为水面影响因素、船舶影响因素和水底影响因素等3类(见图1)。
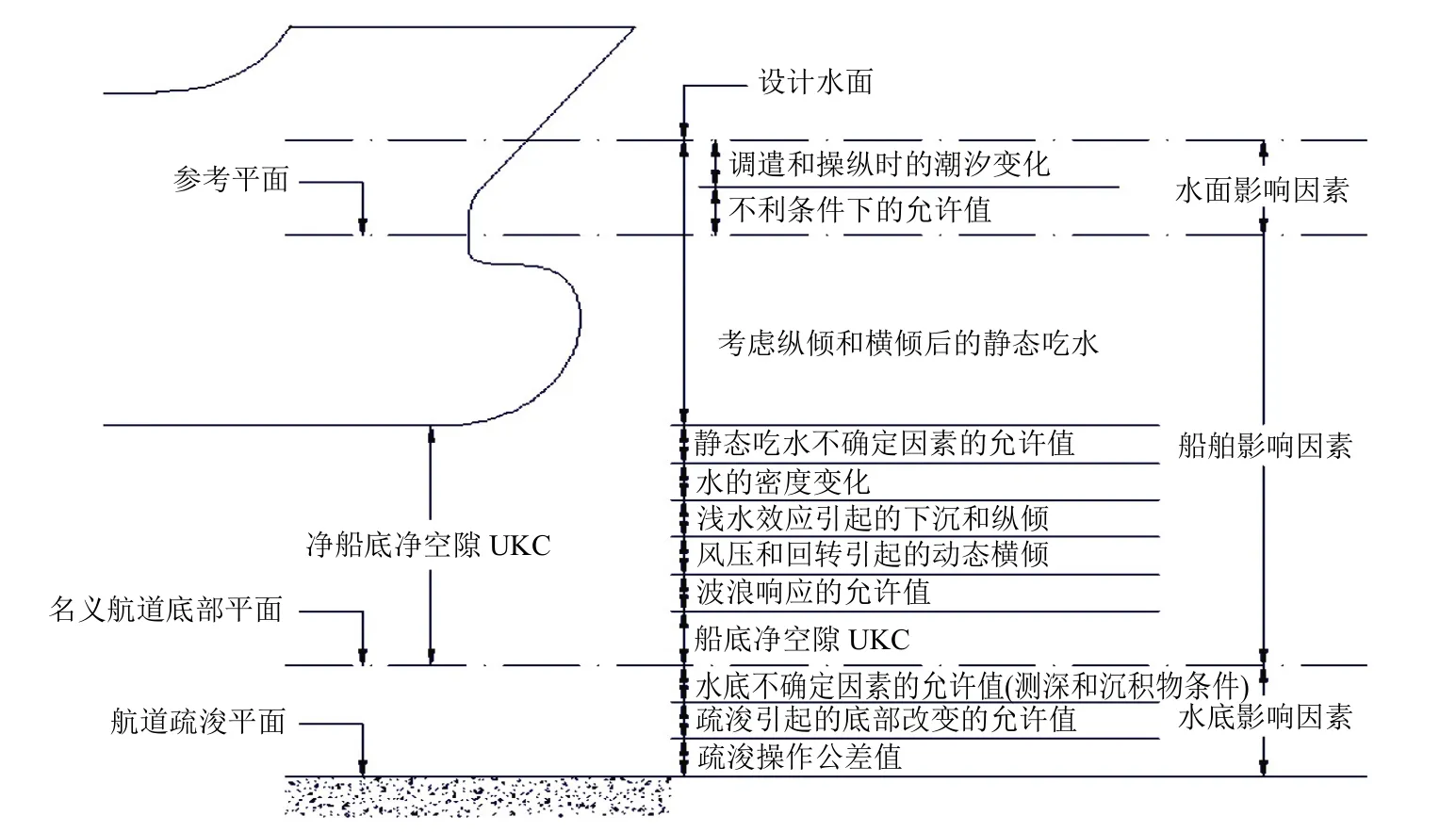
图1 航道水深影响因素
由图2可知,“伊丽莎白女王2号”触礁事故是水底影响因素(未标记的高于水底的礁石)与船舶影响因素(被严重低估的浅水效应引起的下沉)共同作用导致的。
船舶在进出港时,通常需结合不同的潮汐窗口期,考虑允许的最大下沉,选择合适的航速安全进出港。
4 下沉的经验公式估算法
对于船舶浅水效应引起的下沉,相关研究人员已结合船模试验和实船观测进行很多研究,有很多经验公式方法可供借鉴,其中比较受认可的是BARRASS方法[1]。BARRASS根据船模试验和实船观测情况对浅水效应引起的下沉进行深入研究,该方法的适用范围为:方形系数CB= 0.5~0.9;水深吃水比H/T=1.1~1.4。
该方法基本上覆盖了常用的船型,同时H/T覆盖了比较典型的浅水效应区间,因此具有实用意义。为保证使用的灵活性,BARRASS给出以下2种计算方法。
4.1 计算方法1
1) 对于在浅水航道和限制航道中航行的船舶,其下沉量的估算式为

式(7)和式(8)中:H为航道水深,m;B为航道宽度,m;T为船舶吃水,m;b为船宽,m;CB为方形系数;υ为船舶航速,m/s。
2) 对于在限制航道中航行的船舶,B为航道宽度;对于在浅水航道中航行的船舶,没有实际的航道宽度,此时采用宽度影响系数来确定B的值,用于计算船舶下沉量。

4.2 计算方法2
1) 对于在限制航道中航行的船舶,其下沉量的估算式为

式(10)适用于b×T/B×H在0.1~0.265的情况。
2) 对于在浅水航道中航行的船舶,其下沉量的估算式为

由式(10)和式(11)可知,在该计算方法中,通常可认为船舶在限制航道中的下沉量约是在浅水航道中的下沉量的2倍。
BARRASS法采用非常少的参数即可初步估算出浅水效应引起的船舶下沉量。尤其是计算方法2,只需知道方形系数和航速即可进行初步预估,对于快速估算浅水效应而言是非常方便的。
5 阻力的经验公式估算法
对于浅水效应情况下的阻力估算,通常采用的方法为:根据经验公式估算深水情况下的阻力;在此基础上,对深水情况下的阻力进行浅水效应修正。
深水阻力计算可采用被广泛应用且适用于多种船型的Holtrop & Mennen法[9-10]。
浅水效应修正有很多经验公式方法,通常采用速度修正或阻力修正的方法。这里主要介绍比较常用的Schlichting 法[4]和 Lackenby 法[11]。
5.1 Schlichting法
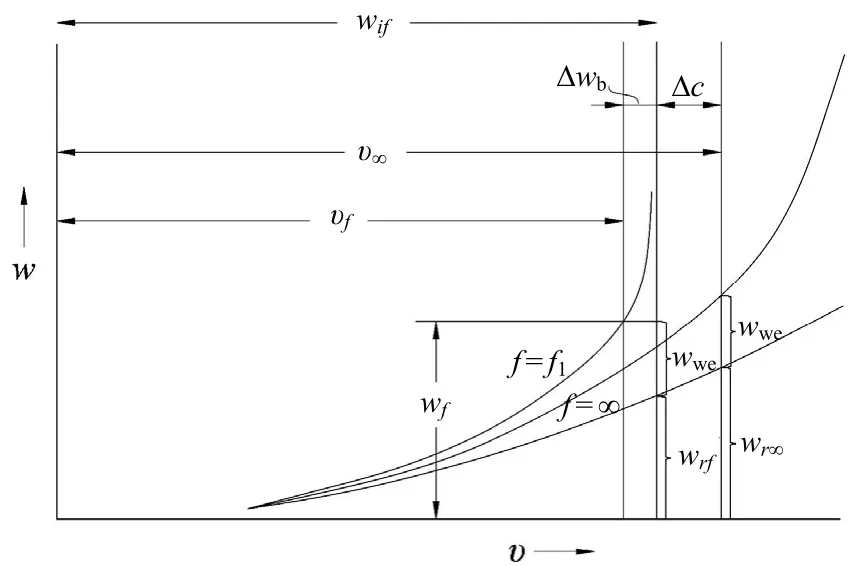
图2 Schlichting法的计算流程
Schlichting法是根据1艘重型驱逐舰和2艘轻型驱逐舰的系列船模试验数据总结出来的方法,用来研究船舶在北海和波罗的海等限制区域航行时遭到的浅水效应问题。
在进行浅水效应阻力修正时,Schlichting法给出以下2个基本假定。
1) 兴波阻力保持不变。船舶航行于浅水区域时,由波浪理论可知,相同波长的船行波的传播速度会下降,Schlichting法假定此时兴波阻力保持不变。在实际计算时,常用剩余阻力代替兴波阻力。
2) 航速下降由船行波速度降低和存在回流速度2部分造成。浅水区域航速下降由2部分造成,即:根据波浪理论得到的船行波在浅水区域航行时速度的下降Δc;由于航道截面受限引起的回流速度Δwb,该值可根据船模试验得到。
根据这些假定,在应用Schlichting法估算浅水阻力时主要采用作图法(见图2),具体计算流程为:
1) 在已知水深的总阻力曲线和摩擦阻力曲线上分别截取深水船速υ∞对应的摩擦阻力wr∞和剩余阻力wwe;
2) 在船行波速度降低修正图(见图 3)中根据已知的水深f和船速υ∞得到的水深弗劳德数(横坐标)查得(纵坐标),从而得到浅水船行波速度wif;
3) 在摩擦阻力曲线上截取wif对应的摩擦阻力wrf,并向上量取步骤1)中得到的剩余阻力wwe;
4) 在回流速度修正图(见图4)中根据已知的船舶水下横剖面积Am和航道水深f得到的航道截面比(纵坐标)查得(左边曲线),从而得到fυ;
5) 将步骤3)中得到的总阻力wf平移至航速fυ处,即可得到该航速下的总阻力。
采用上述方法即可得到各航速下的阻力,从而得到浅水总阻力曲线。
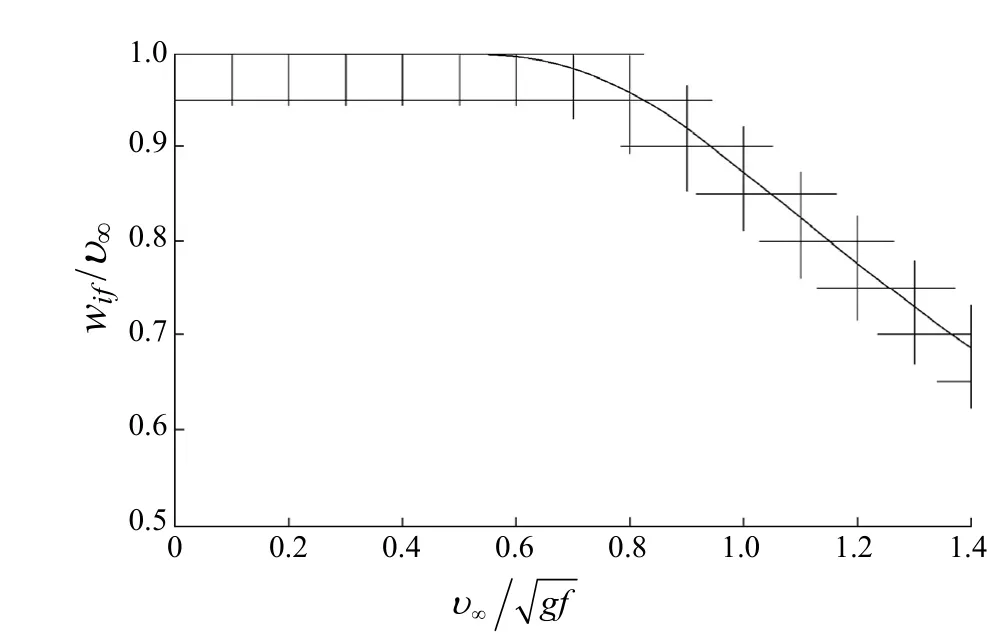
图3 船行波速度降低修正图
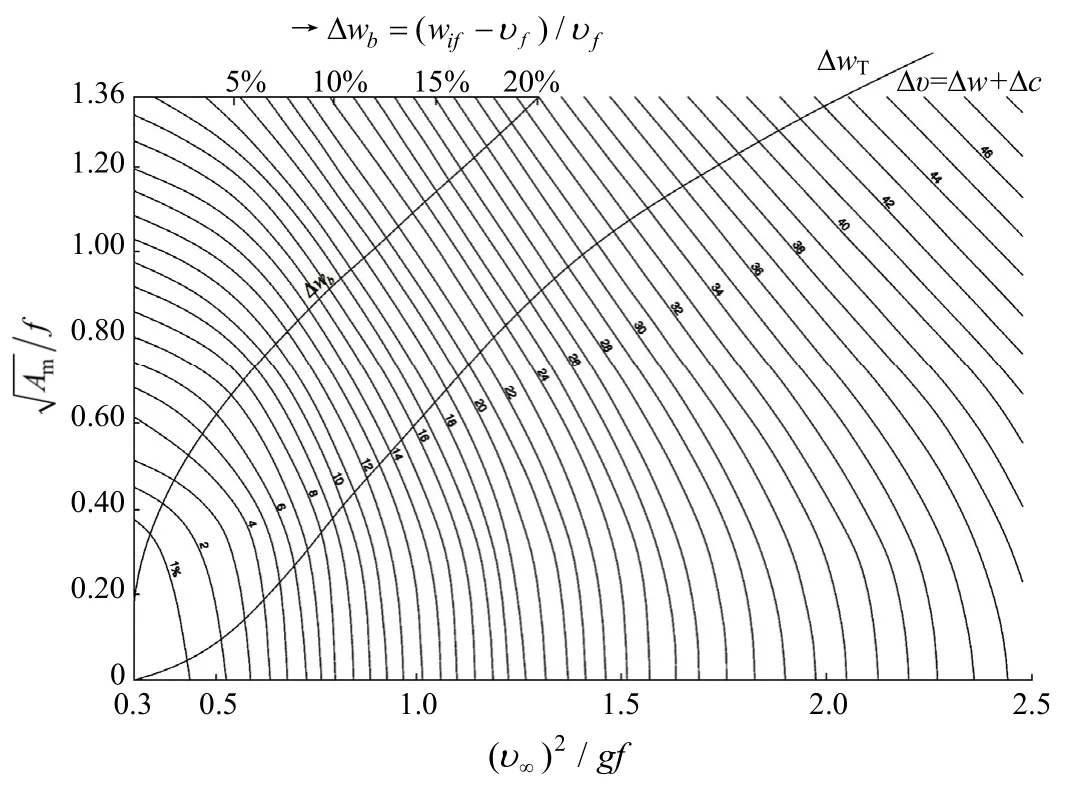
图4 回流速度修正图
应指出,Schlichting法的假定虽然存在很多争议,但能对船模试验结果进行很好的分析和回归,进而提出一套简单有效的浅水阻力修正方法。
5.2 Lackenby法
Lackenby法是在Schlichting法的基础上作进一步分析,根据Schlichting法在船模试验中得到的数据修改理论方法,得到一个适于在浅水情况下对速度进行修正的公式,即

式(12)中:Am为船舶水下横剖面面积,m2;H为航道水深,m;g为重力加速度,m/s2;υ为船舶在深水区域的航速,m/s;Δυ为船舶在浅水区域的航速下降值,m/s。
此外,在进行试航航速修正时,国际拖曳水池会议(International Towing Tank Conference, ITTC)也推荐采用Lackenby法。
6 结 语
本文通过给出浅水效应的定义,提出浅水效应发生的条件,提供一套快速估算浅水效应的经验公式方法,实现对浅水效应的快速预估。当前在设计船舶时一般会在艏部和艉部各设置一台测深仪探测水深,船长可结合仪器的数据和浅水效应估算结果采取应对措施。船长通过培训获得有关浅水效应的知识是十分有益的,只要对浅水效应足够重视,就能避免很多触底事故发生,从而保证船舶在浅水区域安全航行。
猜你喜欢
水上消防(2022年1期)2022-06-16
房地产导刊(2022年4期)2022-04-19
东坡赤壁诗词(2022年1期)2022-02-25
海洋开发与管理(2020年2期)2020-09-10
农产品市场周刊(2018年15期)2018-05-16
小学生作文选刊·中高年级版(2017年10期)2017-11-07
广东造船(2016年3期)2016-07-13
中国水运(2014年12期)2015-01-09
小学生·多元智能大王(2014年7期)2014-08-22
表面工程与再制造(2014年2期)2014-02-27
