
几种叉积图的平衡指标集
2019-06-13 00:42陈碧英
武夷学院学报 2019年3期
陈碧英
(武夷学院 数学与计算机学院,福建 武夷山 354300)
1 预备知识
定义 1.1[2]设 f:V(G)→ {0,1}是图 G 的一个顶点标号映射,则由f可诱导出图G的一个部分边的标号 f*:E(G )→{0,1},对任意的 uν∈ E(G),当且仅当f(u)=f(ν)时,有 f*(uν)=f(u);若 f(u)≠ f(ν),则边 uν未被 f* 标号.称 Bf(G)=ef(1)-ef(0)为图 G 的平衡标号。
定义 1.2[2]称图G的这个标号 f为友好标号;称 BI (G为友好标号}为图G的平衡指标集。
定义 1.3[3]设 f:V(G)→ {0,1}是图 G 的一个点标号映射,定义 g:V(G)→{-0.5,0.5},其中 g=f-0.5.则由g诱导出相应的边标号映射g*:E (G)→ {-1,0,1},g*(uν)=g(u)+g(ν),∀ uν∈ E(G )。
命题1.1[3]若记 νg(i)为在点标号 g下V(G)中标号为i的顶点数,eg(i)为在g导出的边标号g*下E (G )中标号为 i的边数,Bg(G)=eg(1)-eg(-1)。因此g*(e)=-1 等价于 f*(e)=0,g*(e)=1 等价于 f*(e)=1,g*(e)=0等价于在 f中 e不标号。
命题 1.2[3]f为友好标号等价于≤1,g为友好标号。
命题1.3[3]对于图G的一个{-0.5,0.5}标号,记
引理 1.1[3]若 g为 G={V(G),E(G)}的任意一个{-0.5,0.5}标号,则有
定义 1.4 称一个图是(r,s)-正则的(r≠ s),如果这个图的每个点的度数都是r或者s。
命题 1.4[3]若 G={V(G),E(G)}为(r,s)-正则图,g为 G 的任意一个{-0.5,0.5}标号,则:

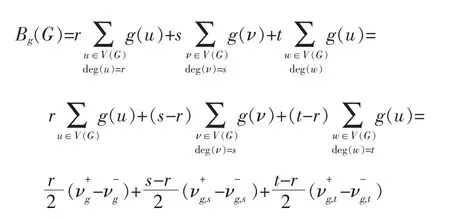
定理1.1[3]若g为r-正则G的任意一个{-0.5,0.5}标号,则 Bg(G )(其中分别表示度为r的点中标号为0.5和-0.5的点的数目。)
定义 1.5 称一个图是(r,s,t)-正则的 (r≠s≠ t),如果这个图的每个点的度数都是r或者s,或者t。
命题 1.5 若 G=(V,E)为 (r,s,t)-正则图,g 为 G的任意一个{-0.5,0.5}标号,则:
定义1.5 称一个图是 (r,s,t,y)-正则的 (r≠s≠t≠y),如果这个图的每个点的度数都是r或者s,或者t,或者 y。
命题 1.6 若 G=(V,E)为(r,s,t,y)-正则图,g 为 G的任意一个{-0.5,0.5}标号,则

设 G1=(V1,E1)与 G2=(V2,E2)是两个图,G1与 G2的叉积图定义为:G1×G2=(V,E),其中

且(ν1,ν2)∈E2}
注意到任意图G的平衡指标集为非负整数集合。为了书写的方便,对于非负整数a,b且a<b,通常用[a,b]来表示[a,b]的所有整数,即若 BI(G )=[a,b],则BI(G)={a,a+1,…,b-1,b}。
Km,n为完全二部图,Cn为n个顶点的圈,Pn为 n个顶点的路,Wn为n个顶点的轮图。在参考文献[4-5]中给出 Cm×Cn和 P2×Pn的平衡指标集。
2 若干叉积图的平衡指标集
定理 2.1 BI(Wm×Wm)=

证明:(1)m=2 时 W2×W2是 4-正则图。
W2×W2共有9个点,设g为友好标号,则Bg(W2×W2)∈ {±2}故 BI(W2×W2)={2}。
(2)m=3 时,W3×W3是 9-正则图。
W3×W3共有6个点,设g为友好标号,则
Bg(W3×W3)=0.故 BI(W3×W3)={0}。
(3)m≥ 4 时,Wm×Wm是(9,3m,m2)-正则图,其中9度点有m2个,3m度点有2m个,m2度点有1个。
设 r=9,s=3m,t=m2,则

Wm×Wm共有(m+1)2个点,由于 m≥ 4 时,m2≥ 2m+1。取遍每一个值,Wm×Wm都存在友好标号。
当(m+1)2为偶数时,即m为奇数时,设g为友好标号,则


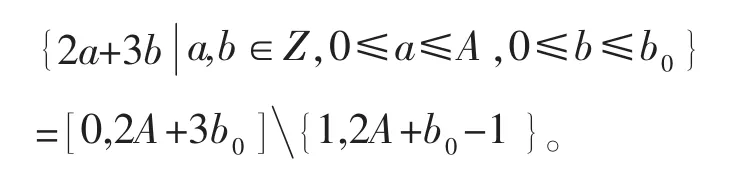
引理2.1 设A≥2为一正整数,则
证明:用数学归纳法来证.
(1)当 A=2 时,2a=0,2,4,则 2a+3b 可以取 0,2,4(b=0);3,5,7(b=1);6,8,10(b=2);9,11,13(b=3);12,14,16(b=4)… 3b0-6,3b0-4,3b0-2(b=b0-2);3b0-3,3b0-1,3b0+1(b=b0-1);3b0,3b0+2,3b0+4(b=b0)。
因 此,2a+3b取遍 了 0,2,3,4,5,6… ,3b0-3,3b0-2,3b0-1,3b0,3b0+1,3b0+2,3b0+4.故此时结论成立。
(2)假设结论对A≤k-1成立,下证结论对A=k也成立。
当 a<k 时,2a+3b 可以取 0,2,3,… ,2(k-1)+3b0-2,2(k-1)+3b0。
当a=k时,2a+3b可以取2k,2k+3,2k+6,…,2k+3(b0-1),2k+3b0。
故2a+3b所有可能的取值为0,2,3,…,2k+3b0-3,2k+3b0-2,2k+3b0所以命题成立。

定理 2.4 BI(K2,m×K1,m)=证明:(1)m=1 时,P3×P2是(1,2)正则图,其中 1


度点有4个,2度点有2个。设r=1,s=2则故 Bg(P3×P2)∈ [-1,1]。故 BI(P3×P2)={0,1}。
(2)m=2 时,K2,2×K1,2是(2,4)-正则图,其中 2 度点有8个,4度点有4个。
设r=2,s=4则
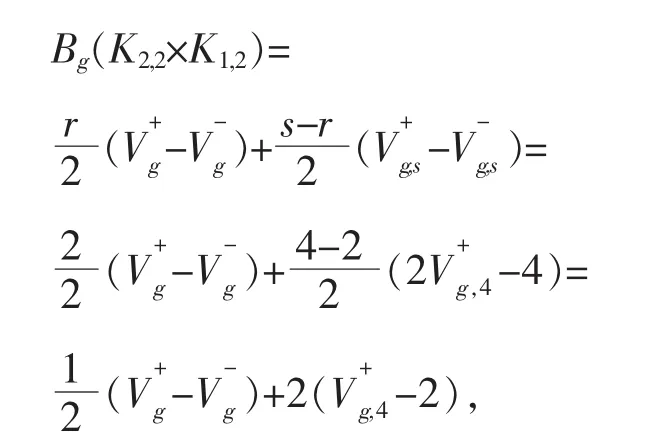
其中:V+g,4∈ [0,4]。
故 Bg(K2,2×K1,2)∈ {0,±2,±4}。故 BI(K2,2×K1,2)={0,2,4}。
(3)m=3 时,K2,3×K1,3是(2,3,9)- 正则图,其中 2 度点有12个,3度点有6个,9度点有2个。
设 r=2,s=3,t=9,则

故 Bg(K2,3×K1,3)∈ [-10,10]。故 BI(K2,3×K1,3)=[0,10]。
(4)m≥ 4 时,K2,m×K1,m是 (2,m,2m,m2)正则图,其中2度点有m2个,m度点有2m个,2m度点有m个,m2度点有2个。



故 Bg(K2,3×K2,3)∈ [-18,18]{±17}。
故 BI(K2,3×K2,3)∈ [0,18]{17}。
(4)m=4 时,K2,4×K2,4是 (4,8,16)-正则图,其中 4度点有16个,8度点有16个,16度点有4个。
设 r=4,s=8,t=16,则

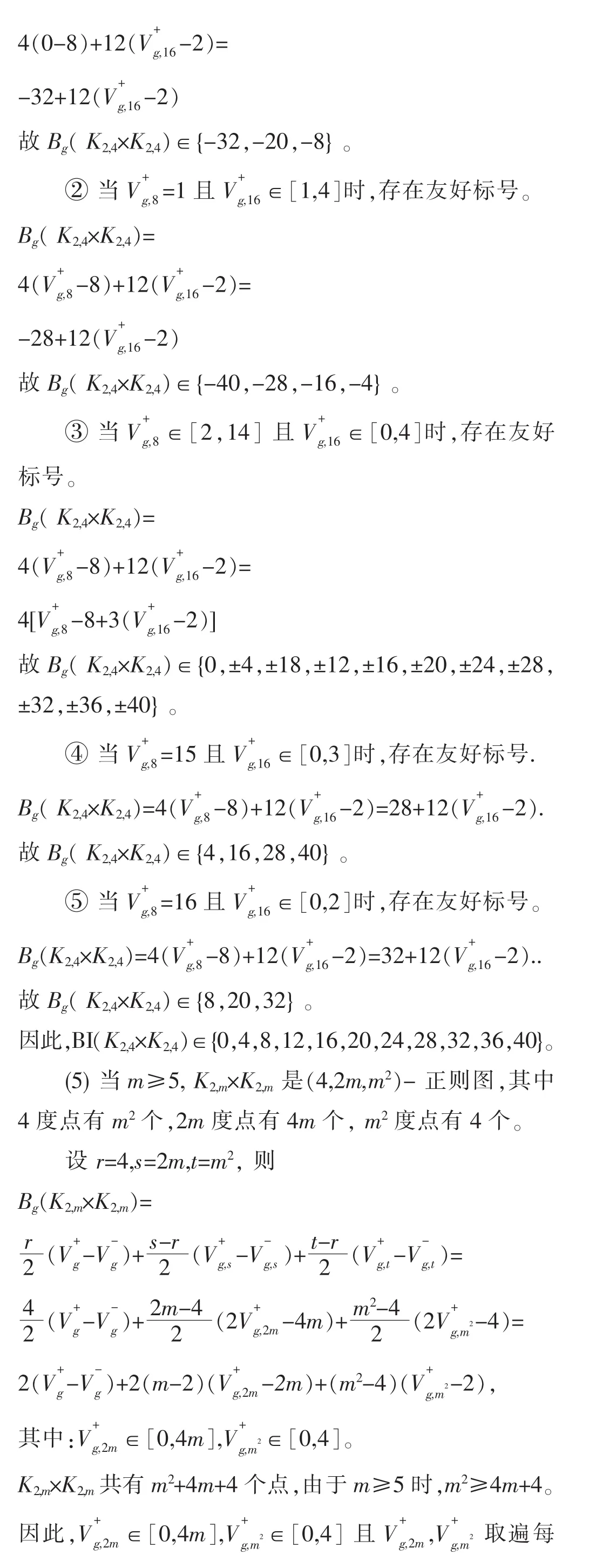
一个值时,K2,m×K2,m都存在友好标号。
当m2+4m+4为偶数时,即m为偶数时,设g为友好标号,则

故 Bg(K2,m×K2,m)∈{0,±(2m-4),±2(2m-4),… ,±(3m+2)(2m-4)}。
故 BI(K2,m×K2,m)∈ {0,2m-4,2(2m-4),…,(3m+2)(2m-4)}。
当m2+4m+4为奇数时,即m为奇数时,设g为友好标号,则

故 Bg(K2,m×K2,m)∈ {±2,±(m-2)±2,±2(m-2)±2,… ,±(6m+4)(m-2)±2}。

3 结论
通过证明得到 Wn×Wn,Cm×Cn,K1,m×K1,m,K2,m×K1,m,K2,m×K2,m叉积图的平衡指标集的准确值。
猜你喜欢
新高考·高三数学(2022年3期)2022-04-28
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
辽宁大学学报(自然科学版)(2020年2期)2020-12-13
南京大学学报(数学半年刊)(2020年1期)2020-03-19
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
上海师范大学学报·自然科学版(2018年3期)2018-05-14
中文信息(2017年12期)2018-01-27
高中生·天天向上(2015年11期)2015-10-21
湖南师范大学学报·自然科学版(2014年3期)2014-10-24
