基于光学遥测的移动源NOX排放表征方法研究
2019-05-15 09:25汪光焘胡肇焜
城市交通 2019年2期
汪光焘,李 昂,胡肇焜
(1.同济大学,上海 201804;2.国际欧亚科学院中国科学中心,北京 100107;3.中国科学院安徽光学精密机械研究所,中国科学院环境光学与技术重点实验室,安徽 合肥 230031)
0 引言
机动车是由内燃机燃烧化石燃料(如汽油、柴油、天然气等)提供动力。在实际燃烧过程中由于燃烧不充分,机动车尾气中会排放出SO2,NOX,CO,PM10,PM2.5,BC,OC和VOCs等多种气态和颗粒状固态污染物。
机动车污染物排放量一般采用模型估算法和排放因子法相结合的方式进行估算。其中,道路移动源的活动水平数据主要来自机动车数量和行驶里程两方面;而机动车的排放因子主要采用MOBILE, EMFAC,COPERT,CMEM,IVE和MOVES等模型进行估算,排放量主要采用排放因子法进行估算[1]。
随着现代物理学和化学研究的进步,各种大气环境监测技术也取得长足进步。其中,以光谱法为基础的光学和光谱学监测技术作为新兴的技术手段,以其无须预采样、可大范围多组分实时自动监测而成为环境污染监测的理想工具。2006年,美国环境保护局(United States Environmental Protection Agency,US EPA)也在环境技术验证项目(Environmental Technology Verification Program,ETV)中发布了基于地基光学遥测方法非点源排放测量标准。车载差分吸收光谱 技 术 (Differential Optical Absorption Spectroscopy,DOAS)作为一种被动式光学遥测技术,由于具有快速实时、结构简单、多组分同时观测等优点,国际上已经被大量的应用在点源、面源的排放监测上。采用这种方法,2008年文献[2]获取了北京市五环路的NO2排放通量;2009年文献[3]获取了墨西哥城的NO2和HCHO的排放通量;2011年文献[4]获取了新德里城NOX的排放通量,并与卫星数据进行了比对、校验;2012年文献[5]获取了Tijuana 地区NO2的排放通量。2014年文献[6]采用车载DOAS 和车载SOF的方法连续5年获取Houston 地区点源和面源的SO2,NO2及VOCs的排放情况。
在中国,中国科学院安徽光学精密机械研究所和复旦大学开展过车载DOAS的相关工作[7-9]。现有研究局限在单纯绕行重点区域来获取区域整体对外排放通量,并没有系统地开展获取区域网格化排放通量的理论、方法及应用研究。首先,车载DOAS系统大多采用天顶观测的方式(即采用90°的观测仰角),只能获取污染物参考光谱为零的相对垂直柱浓度,无法获取绝对垂直柱浓度,更没有结合大气辐射传输模型考虑气溶胶、云等影响;其次,未开展区域高空间分辨率的网格化排放通量研究;最后,缺乏车载DOAS对点、面源排放的验证方法研究以及排放通量的性能指标和影响因素研究,方法体系完整性不足。
与传统的排放因子法不同,本研究以车载光学遥测平台为基础,建立高空间分辨率的网格化大气污染源排放通量获取方法,从实际观测角度为污染源排放清单(以下简称“源清单”)提供校验。采用车载DOAS 遥测技术开展污染源排放的理论及方法研究,重点研究基于车载光学遥测技术的污染物垂直柱浓度获取方法、结合多源遥测数据插值的柱浓度分布区域分布重构方法、污染源网格化排放通量获取方法,并开展排放通量测量的影响因素以及典型区域污染气体排放特征研究。
该结果将为高时空分辨率源清单(点、面源以及无组织源等)提供一种基于车载光学遥测技术的获取和校验方法,有效弥补目前在源清单获取手段上的不足,这不仅有助于认识污染源排放现状,也为污染物来源解析以及空气质量预警预报模型提供基础科学数据。该方法将是基于车载光学遥测技术的道路移动源NOX排放定量表征方法研究的基础。为了便于与所提研究方法的对比,本文首先介绍传统的排放因子法。
1 基于排放因子的机动车排放量化表征方法
1.1 污染物排放量化表征方法概述
源清单的定量表征方法主要包括四种:1)物料衡算法,是基于物质质量守恒定理的分析方法;2)排放因子法,是基于活动水平的自下而上的计算方法;3)实际测量法,通过排放监测设备测量排放源的排放特征;4)模型估算法,是基于统计回归的排放估算模型来估计污染物排放特征。一套完整的源清单的建立通常是一种或几种方法组合使用。在实际源清单编制工作中,排放因子法及模型估算法的应用较为广泛。
1.2 机动车污染物排放估计方法
机动车污染物排放特征受到内燃机、尾气控制技术、燃料类型等因素的影响。机动车排放量化研究过程一直遵从ASIF 方法,一种自下而上的计算方法,其中A指交通活动水平(Activity),S指车队组成结构(Structure),I 指能源强度(Intensity),F 指燃料种类(Fuels)。其计算公式为,式中:(EQij)m为使用第i种能源的第j类车辆排放第m种污染物(或能耗)的日排放量/(g·d-1);(EQFij)m为使用第i种能源的第j类车辆排放第m种污染物(或能耗)的单位里程排放量/(g·km-1),即排放因子;Vij为使用第i种能源的第j类车辆的保有量/辆;Mij为使用第i种能源的第j类车辆日均行驶里程/km;EQm为排放第m种污染物的汽车日尾气排放总量/(g·d-1)。
估计机动车污染物排放总量的数据需求包括:机动车类型结构、机动车保有量、日均行驶里程及相应的机动车污染物排放因子。显然,机动车污染物排放因子的准确性决定了机动车污染物排放总量估计的准确性。
1.3 机动车交通活动水平数据来源与收集
表征机动车交通活动水平的数据主要包括不同类型的机动车保有量及车辆日均或年均行驶里程。其中,机动车保有量包括本地登记注册的机动车及外地驶入的机动车数量两部分。由于不同类型机动车的数量、运营比例、行驶里程及污染物排放因子等各种参数均有所不同,机动车污染物排放特征亦存在差异。因此,在机动车排放总量估算过程中需要对不同车辆类型的不同污染物进行分类计算。
机动车污染物排放总量估算过程中所需的交通活动水平数据包括:机动车车型、分车型的保有量;分车型的机动车日均或年均行驶里程;机动车燃料类型、应用比例、燃料成分、含硫率、排放标准;机动车日均工作时间、平均行驶速度;机动车全社会客运量和货运量。可能的获取途径包括:车管所机动车登记信息数据库;交通局统计资料;机动车行业协会;各省市统计年鉴;污染源普查数据;相关法律法规;实地调研。
2 机动车污染物排放因子估计模型
机动车污染物排放因子通过道路实测法或采用基于数理统计的模型估算得到。道路实测法主要有两种方式:1)车载实验,指在实际行驶的车辆上安装实时污染物排放收集监控系统,称之为“便携式车载排放测试系统”,从而获得单车在不同工况下的污染物排放因子;2)隧道实验,是利用隧道原理的间接监测方法,逐个单位时间测量机动车的排放速度、成分等,获得机动车车流平均排放因子。显然,车载排放测试结果能较真实地反映机动车的实际排放特征。但这两种实测方式均存在多种影响因素,受被测车辆代表性的影响较大,并且需要大量的人力物力,要求实际测试时持续较长的时间。在应用层面,如果要建立机动车污染物排放清单,则道路实测法的可操作性和全面性不如模型估算法。因此,在中国较为缺乏机动车污染物排放基础数据的情况下,机动车排放因子的主要来源是采用各种国际认可的、发展成熟的机动车污染物排放计算模型进行估算。
美国和欧洲开发的机动车排放模型最具代表性,其原理是根据大量的实测数据,建立机动车基本排放速率(basic emission rates),使用者根据研究区域的实际情况和机动车的技术标准设置具体的参数,修正计算得出符合研究区域特征的本地化污染物排放因子。下面对机动车排放因子模型进行简要介绍。
2.1 MOBILE模型
MOBILE模型是以平均车速为污染表征参数的数学关系模型,诞生于1978年,经过几十年的发展,已被广泛应用于宏观尺度以及中观尺度机动车污染物平均排放因子的计算中。MOBILE模型是建立在联邦测试程序(Federal Test Procedure,FTP)的大量台架测试结果上,对不同车型各种水平的测试结果进行统计回归分析,综合考虑了温度、速度、驾驶行为、燃料品质、行驶里程等因素的影响,得出不同车型的平均基本排放速率,形成MOBILE模型的核心数据。使用者再利用本地数据的输入,对平均基本排放速率进行修正,从而得到适合区域的平均基本排放速率。
MOBILE6.2模型包含8大模块,共27类模型参数,如活动水平、车队特征控制计划、燃料特性和外部环境等,均在参数输入的范围内。同时MOBILE6.2模型按照车重、燃料类型等将机动车划分为28 类,使用者需要根据估算区域的机动车类型结构对相关的活动数据进行整理转化。道路类型划分为高速公路、干路、支路、高速公路匝道4 类;排放分为尾气管排放、蒸发排放和磨损微粒物排放等几类。
虽然,MOBILE模型仅使用平均车速为特征参数,无法体现行驶工况对机动车排放的影响,但其应用性强,对机动车活动数据要求不高,适用于机动车数据系统尚不完善的地区,中国研究者也对MOBILE模型进行了广泛的本地化处理。
2.2 EMFAC模型
与美国其他州不同,加利福尼亚州采用不同的大气污染物排放标准,因此,加州空气资源委员会(California Air Resources Board,CARB)对应地根据其自身情况开发了EMFAC(Emission Factors)模型。EMFAC模型属于经验模型,原理与MOBILE模型类似,也是对基本排放因子进行车速、温度、行驶里程、驾驶行为等方面的修正。区别于MOBILE模型采用的FTP工况,EMFAC模型采用加州标准工况(California Unified Cycle),即LA92,每年从车辆登记数据库中随机抽取部分车辆进行工况测试,进而不断更新改进其数据库,对模型进行完善。
根据机动车的重量、燃料技术等特性,EMFAC模型将机动车划分为13 类,包括客车、货车、公共汽车、摩托车、校车等,估算时间可以从1965—2020年中选择任一年或者是任一时间段。
关于EMFAC模型的应用,香港环保署对其进行了本地化处理,修正为模型EMFAC-HK。模型改进主要体现在车型、排放标准、排放控制计划等方面,将香港关于机动车的控制计划反映在模型中,并不断对模型进行更新,以体现控制水平的变化。
2.3 COPERT模型
COPERT模型(Computer Programme to Calculate Emissions from Transport)由欧洲环境署(European Environment Agency)资助开发,在欧洲应用广泛。其原理同样与MOBILE模型类似,基于大量可靠的实验数据,以平均车速为排放特征参数,可以计算单车或者车队一年的污染物排放量。但与MOBILE模型不同的是,COPERT模型以燃料销售为基础数据,更适合使用不同尾气排放控制标准和很少交通数据的区域,且COPERT模型采用的是欧洲ECE 模拟工况。具体参数内容如下:1)活动水平数据,包括分车型保有量、分车型的年行驶里程、分车型分道路类型的平均速度;2)车队特征,车龄登记分布;3)燃油特性,包括消耗量、含硫量、蒸汽压和HC 比;4)气候参数,包括月最低和最高气温。
COPERT模型将机动车划分为小客车、轻型货车、重型货车、公共汽车或长途汽车和摩托车5 大类,再结合车重、燃料类型、发动机排量和排放控制标准等影响因素将其划分为具体的车型;道路类型则包括城区道路、郊区道路和高速公路;定义污染物排放来自于热稳定运行排放、冷启动排放和燃料蒸发排放。
2.4 IVE模型
MOBILE模型和COPERT模型都是根据美国以及欧洲等发达国家当地的数据建立的。鉴于中国仍是发展中国家,机动车类型结构以及车队的行驶特征与发达国家有较大差距,应用以上模型可能会对源清单造成较大的不确定性。IVE模型(International Vehicle Emission Model)是由美国加州大学河滨分校环境研究与技术中心(University of California,Riverside,College of Engineering-Center for Environmental Research and Technology,UCR CE-CERT)、全球可持续体系研究组织(Global Sustainable Systems Research,GSSR)等,在EPA国际事务处的资助下共同开发的针对发展中国家的机动车污染物排放估计模型。其原理同样是对基础排放因子进行修正,针对以往模型以车队的平均速度作为替代因子的设置,IVE模型引入了VSP(Vehicle Specific Power)和ES(Engine Stress)两个参数以表征车辆的行驶工况特征,并根据上述两个指标将发动机工作状态划分为60个VSP区间。根据各区间与排放之间的对应关系以及分配比例,计算得到机动车在不同行驶工况下的排放因子。
应用IVE模型所需的数据以及信息包括当地城市信息、车队技术组成信息和基准因子修正信息等。另外,IVE模型需要输入研究对象的道路平均坡度、海拔、温度、湿度、I/M制度、空调开启比例、燃油品质(包括含铅率、含硫率、甲苯含量等)、车队行驶特征(包括行驶距离、启动次数、VSP 区间分布、热浸时间分布、平均速度)等信息。
对于车队的组成信息,IVE模型根据机动车的车型、燃油类型、车重、发动机技术、污染控制措施、累计行驶里程等因素,详细划分了机动车技术类型,用户需要根据本地机动车分类以及获得的活动数据,选择描述恰当的技术类型,计算该类型机动车所占比例,填写输入表格导入。同时,也可自定义某些技术类型,以更好地适应本地机动车类型结构。
2.5 MOVES模型
MOVES模型(Motor Vehicle Emission Simulator)以MOBILE 和NONROAD模型为基础,积累了大量的车载排放测试及台架测试数据。其默认的数据库涵盖美国的机动车排放信息,包括来自众多机构的数据,如美国国家环境保护局(U.S.Environmental Protection Agency)的研究、其他州及地方研究机构的研究、车辆普查信息和相关的旅游数据等。MOVES模型采用开放的数据库管理系统,方便使用者输入本地化数据,可适用于不同地区,模型移植性高。与其他单一的模型不同,MOVES模型能同时满足宏观、中观、微观不同层次对机动车污染物排放的综合分析,但不同的层次需要输入的数据不同。MOVES模型比IVE模型考虑得更全面,不仅保留了VSP参数,同时将其与速度特征结合起来,反映车辆的行驶工况特征。根据EPA所做的大量与MOBILE模型模拟结果的对比试验显示,MOVES模型更好地反映了机动车的行驶特征,提高了计算精度。MOVES模型主要由四部分组成,包括总活动数据生成块、运行工况分布生成块、排放源bin 分布生成块、气象和燃料信息生成块。
MOVES模型的主要输入参数包括速度分布、车龄、燃料类型、道路类型等。在操作控制版选项中,需要进行以下11个子类别的数据选择:运行描述、规模(宏观、中观、微观)、时间跨度(年、月、日、小时、分钟)、地理区域(国家、县、路段)、车型或发动机类型(摩托车、小型客车、长途汽车等)、道路类型(城市封闭和非封闭道路、乡村封闭和非封闭道路)、污染物种类和过程、数据输入管理集、政策、数据输出和高级选项。对于本地用户建立的自定义数据库,MOVES模型会在运行的时候自行选取对应的输入信息。
2.6 小结
上述5 个模型的对比分析如表1 所示。MOVES模型由于其开放的数据库及灵活的机动车污染物排放估计方法,具有最好的模型移植性,其中模型本地化修正是模型移植的重点及难点。
3 基于车载光学遥测耦合三维风场的面污染源NOX排放定量表征方法
3.1 研究背景
中国大气环境污染呈现区域性、复合型污染特征,京津冀地区作为经济发展最活跃的地区之一,大气污染问题尤为突出。要了解造成大气污染的前因后果并有效控制,需要对各类污染源的排放进行实时有效监测,从而建立大气主要污染物的区域面源排放清单[10-11]。目前区域面源的获取主要依靠污染源调查统计[12]、卫星数据[13-14]、模型计算[15-16]等方法,但存在时间滞后、分辨率低等问题,使得区域面源排放清单的获取难题一直未得到有效解决。
本研究构建了面向区域面源排放监测的车载光学遥测系统,耦合污染物垂直柱浓度监测数据与三维精细化风场数据,建立了网格化面源污染排放通量评估方法,形成了经过专家鉴定的《车载光学遥测系统(DOAS)监测区域污染面源技术导则》(以下简称《技术导则》),为定量获取面源、无组织源的排放,以及实时更新源清单提供了一种快速有效的光学遥测方法。
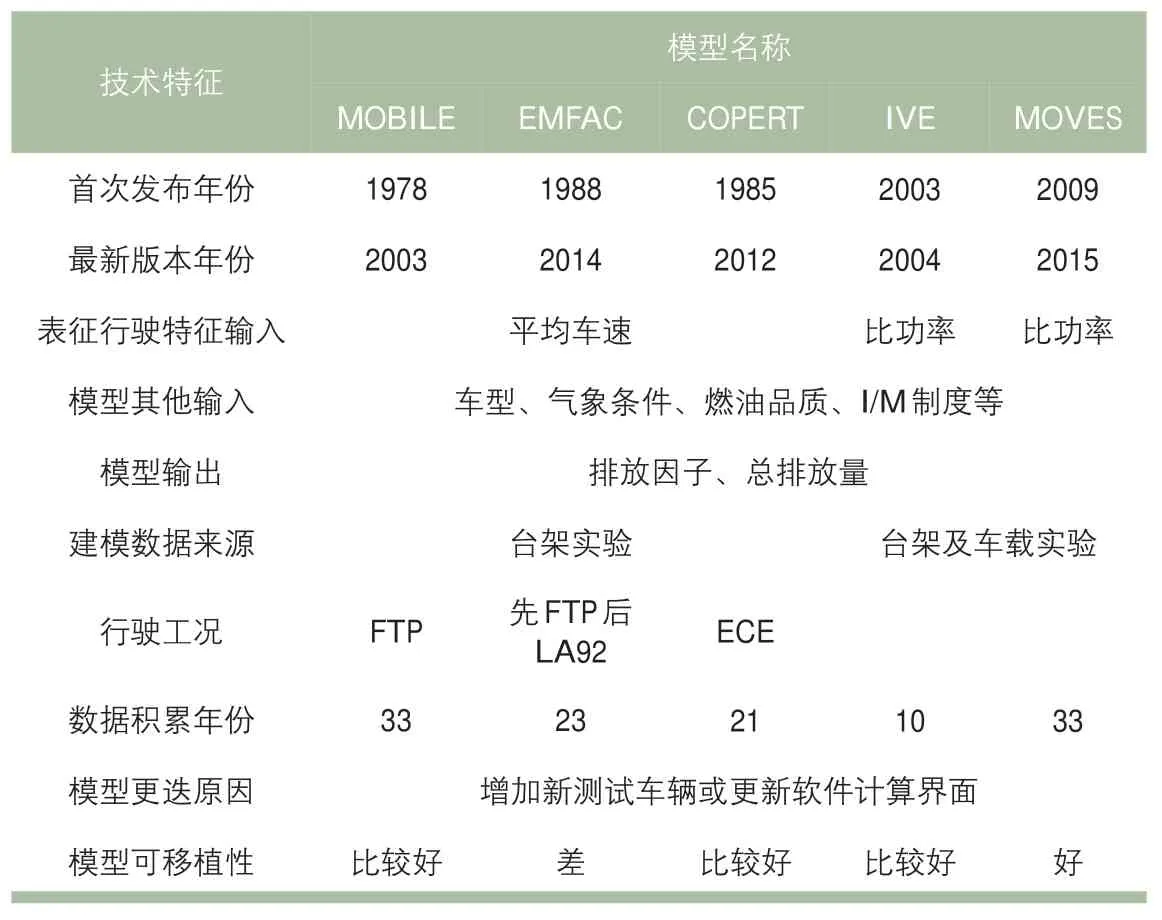
表1 机动车污染物排放模型对比分析Tab.1 Comparative analysis of vehicle emission models
根据《技术导则》制定的技术方法及观测要求,完成了对北京市内不同功能区及京津冀不同方向通道6 个季节42 天的车载DOAS走航观测,以及三维风场数值模拟与订正。通过观测获取的各区域主要污染物(SO2,NO2,HCHO)的柱浓度分布,耦合各区域三维风场数据,计算区域面源污染排放通量;从时间变化、空间分布上细致分析了各区域污染分布特征,并与国内外相关结果进行了对比分析。
本研究提供了一种快速有效的具有国有自主知识产权监测设备的高精准光学遥测方法,并通过专家鉴定。目前上述一整套的仪器设备、方法、流程已经建立,并完成北京及京津冀典型区域观测和污染特征分析,未来将进行数据深度挖掘,细化特征分析;同时,进一步实现成果转化,完善观测设备,增加颗粒物监测能力,集成现场三维风场模块等。这一方法有效弥补了在准确、高时空分辨率污染源监测方法上的缺陷;发现城市环境存在的问题,为更精准的城市污染防治提出科学决策依据。
3.2 车载被动光学遥测技术原理

图1 车载被动光学遥测技术原理Fig.1 Principle of mobile passive optical telemetry
车载DOAS系统在汽车移动过程中,采集太阳散射光,并基于被动DOAS原理,测量路径上每条光谱的污染气体(SO2,NO2等)斜柱浓度SCD。在光谱的反演过程中,首先在测量路径上任意选择一条测量谱作为参考谱,反演得出整个测量路径上气体柱浓度的分布趋势,再根据气体分布趋势找出最小值,该最小值所对应的测量谱被认为是此次测量的此种污染气体的夫琅禾费参考谱。再利用此夫琅禾费参考谱重新反演该测量路径上的所有采集光谱即可得到测量路径上污染气体的柱浓度,过程如图1所示。
由上述分析可知,由此反演得到的是差分斜柱浓度DSCD,为了得到污染气体的垂点柱浓度VCD,需要进行转化。但在车载DOAS 观测中,近似认为DSCD 为对流层VCD。这主要有以下几点考虑:1)车载DOAS测量时间都是在正午附近,太阳天顶角较小,平流层的贡献最小;2)观测仰角α为90°,按照大气质量因子的几何近似计算方法得出AMFtrop≈1;3)所选择的夫琅禾费参考谱中污染气体的浓度含量相比测量谱中污染气体的较高浓度可忽略,认为此条参考谱是“干净”的。综合以上几点考虑,认为车载DOAS测量得到的就是污染气体的垂直柱浓度VCD。但这种近似VCD 在无云、低气溶胶状况下,且测量路径上污染物浓度有明显的高低区分或测量大的污染源时很容易满足,而对于其他情况这种近似就会带来较大的误差,需要进行修正。
通过以上分析获得了测量路径上污染气体的VCD 后,再根据GPS 系统获取的地理信息,将两者进行叠加即可获取污染气体的柱浓度分布信息,这种空间分布信息能够准确、直观地定位城市污染状况。以北京市环路的某次观测为例,利用车载DOAS系统对区域内开展网格化观测,实现了观测路径上NO2柱浓度的快速测量(见图2)。
在无明显工业污染源区域且易出现交通拥堵的路段,将柱浓度分布数据同观测时的行车速度结合,发现交通拥堵对污染气体柱浓度高低影响巨大。以北京市北五环路为例(见图3),在五环路拥堵路段,NO2柱浓度明显升高;整体行驶畅通时,NO2柱浓度无明显升高。车载光学遥测技术可以实现道路移动源氮氧化物柱浓度变化的快速捕捉。
3.3 基于车载被动光学遥测技术的污染气体通量获取原理
一般而言,用描述守恒量传输的连续偏微分方程表示任意有限区域内的能量守恒。在各自适应条件下,这些量(包括质量、能量、动量、电荷等)都是守恒的,其传输行为均可以用连续性方程来描述,即

式中:φ为物质对体积的微分比例,即物质的密度/(kg·m-3),本文指痕量气体的浓度;f为通量/(kg·s-1),即φ的矢量函数,指每单位时间单位面积的痕量气体流量;t为时间/s;σ为φ单位体积单位时间的生成量/kg(去除量),当σ>0 时,称σ为源,反之则称为汇。,式中:q为物质的量/mol;V为体积/m3;
式(1)表示的连续性方程主要涉及三方面要素:守恒量的源、通量散度和守恒量的时间变化率。如果对式(1)中的体积变量积分,则有
假设在绕行区域内气体分子为常数,并且在测量的过程中并没有改变,那么可以被忽略,则有
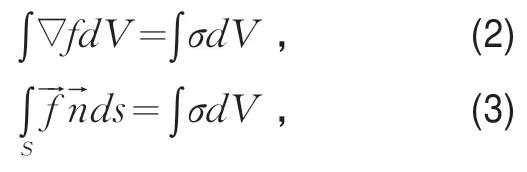
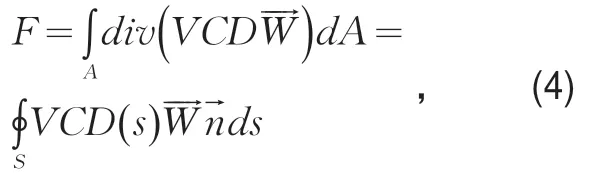
式中:VCD为污染物垂直柱浓度;为绕行区域的平均风场。沿移动路线进行积分,即可获得区域内污染物的排放通量(见图4)。车载DOAS测量时,由于行驶路径上单个光谱的积分时间有限,可以将式(4)的连续积分转换为离散的求和,即式中:△si为连续两条测量光谱之间的距离差,可通过由GPS获取的车速与测量时间的乘积得到;β为汽车行驶方向与风向之间的夹角。
3.4 精细化三维风场数据模拟
风场数据是计算污染物排放通量的关键信息,其数据质量直接影响排放通量计算结果的可信度。在以往的计算中通常采用临近地面气象观测站的风场数据,即一个点的风向风速代表了整个监测区域的风场特征;风场信息的不准确直接影响污染通量的计算精度。因此,本次研究中确立了利用气象数值模拟、气象站点观测和雷达测风数据集合方法,获取监测区域优化的三维网格化风场数据:采用多模式嵌套方法对监测区域进行风场数值模拟,同时滚动同化气象站点观测和探空数据来不断调整风场模拟过程;采用风廓线雷达和激光雷达,在污染监测同时对区域内风场进行实时观测,利用风场实测数据对模拟结果进行订正;最终形成区域网格化、不同高度、逐小时、200~1 000 m 分辨率的优化三维网格化风场;使风场数据水平达到分区、垂直达到分层。
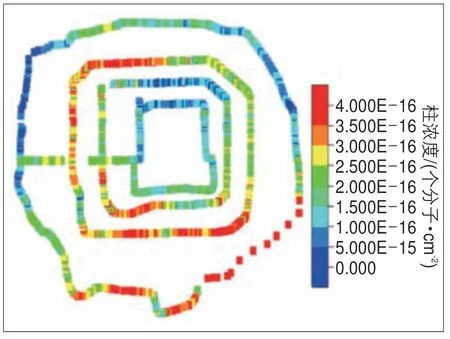
图2 北京市环路观测路线及柱浓度分布Fig.2 Observation route on different ring expressways and distribution of pollution column concentration in Beijing
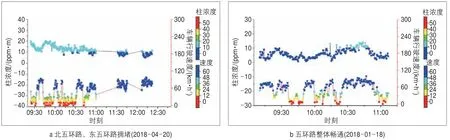
图3 北五环路车辆行驶速度与NO2柱浓度对比Fig.3 Operating speed vs.NO2 column concentration along North Fifth Ring expressway
气象数据改进方案如图5 所示。区域风场数据按照城市尺度和小区尺度进行监测。
1)城市尺度监测区域模拟。其数值模式为中尺度气象数值模式(WRF)。①气象初始场来自NCEP FNL 数据(美国国家环境预报中心提供的1º×1º全球再分析数据);②模拟过程:调试适用监测区域的参数化方案,滚动同化地面气象观测和探空数据,进行3~4重嵌套,其中最内层嵌套模拟区域范围应涵盖整个监测区域;③模拟结果是监测区内水平分辨率为1 km的三维网格化风场数据。
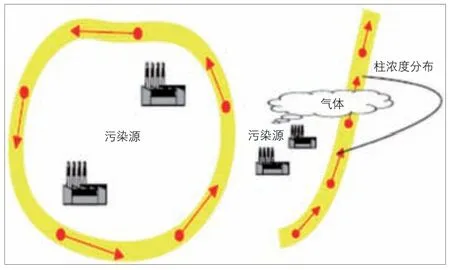
图4 污染烟羽扫描剖面与通量计算原理Fig.4 Contaminated plume scanning profile and flux calculation principle
2)小区尺度监测区域模拟。其数值模式为小尺度气象数值模式(CALMET)。①气象初始场来自WRF 风场模拟结果;②模拟过程:输入监测区域地形和下垫面资料,再利用计算流体力学模型和地面气象站点逐小时观测数据对WRF 风场结果进行精细化调整;③模拟结果是监测区域内水平分辨率为200 m的三维网格化风场数据。
3.5 污染气体通量计算修正
基于车载光学遥测耦合三维风场的面污染源NOX排放定量表征方法可以实现不同痕量气体的排放通量的计算,但对于NOX的排放,由于车载被动DOAS 系统只能测量NO2柱浓度,无法测量NO 柱浓度。为了获得NOX的排放,需要对式(4)进行一些修正。
1)寿命的修正。
如果在监测区域具有恒定的风向和风速,就可以计算得到有限的大气寿命的校正因子。寿命的校正因子式中:D为测量点到排放源的平均距离/m;W为测量时的平均风速/(m·s-1);T为NOX的寿命/s,其具体数值依赖于光化学反应及观测期间的气象条件。
2)化学转换因子。
快速的化学转换可以改变排放物的比例,以NOX的排放为例,大多数的NO2最初是以NO 的形式排放出来。这些分子的比例依赖于O3的浓度和NO2的光解率[17]。排放物质的大气浓度会随着过程而发生改变,这比从排放源到测量点的传输时间更快速。因此,通常所能测量的痕量气体的浓度代表的仅仅是一部分排放的痕量气体的量,这里的化学转换因子

图5 气象数据改进方案流程Fig.5 Meteorological data improvement program
应用以上两个校正因子之后,监测区域的整个NOX排放为FNOX=RCLFNO2=RCL
3.6 基于车载光学遥测技术的道路移动源NOX排放定量表征
将车载光学遥测技术耦合精细化三维风场数据,通过将区域划分为若干小区块,可以实现观测区域内网格化NOX排放量的定量获取。以北京市环路监测结果为例,将获取的网格化排放通量投影到环路内各网格上时,实现了观测路径上高空间分辨率的NOX排放的定量表征。结果表明,走航道路上NOX排放高值主要出现在交通拥堵或交通枢纽位置;车流量大但通行顺畅的路段,NOX排放无明显升高(见图6)。
基于车载光学遥测技术的道路移动源NOX排放定量表征可以通过便捷的车载走航观测,实时提供重点道路网上NOX的排放信息。该方法对于校验现有道路移动源排放清单及实时评估交通排放具有重要意义。
3.7 北京市五环路内快速路网道路移动排放通量对比源NOX
建立道路移动源的定量表征是一项系统性工作,需要大量的交通统计数据与本地化的实测数据来提供道路移动源的活动水平与排放因子。国际上大多数业务化源清单大多服务于中尺度模型,其空间分辨率多为3 km×3 km。以清华大学等团队的研究工作为例,利用人口分布、土地利用率等信息分配点、面污染源空间信息(见图7),这种处理方式会使污染物排放的空间分布与实际的空间分布存在差异。受限于源清单单一的分配技术和低空间分辨率,大多数业务化运行的源清单在五环路内区域这一空间尺度上较为粗糙。
以上源清单可以在全球模式或中尺度模式中起到较好的模拟效果,但是对于更小空间尺度的模拟需求则无法满足。为了实现对更小空间尺度的污染物浓度分布的精细化模拟,重点区域的高分辨率源清单是必要条件。
中国已有众多课题组开展了相关研究工作。例如针对北京市乃至京津冀区域,清华大学、北京工业大学(以下简称“北工大”)等相关课题组已经建立更高空间分辨率的源清单(见图8)。将2015年9月7日外场实验获取的基于车载被动DOAS系统遥测数据建立的污染源排放数据同北工大建立的基于2015年统计数据的空间分辨率为1 km×1 km的源清单在空间分辨率及排放强度上进行对比验证,考虑源清单组分,重点选择NOX作为对比验证的污染气体。通过直观对比,两者较大多数业务化源清单在空间分辨率上有了明显提高。同时,两者在污染源高值的空间分布上存在部分位置的一致,如北京市五环路内较为拥堵的北五环路、北四环路,包括连接的京藏高速一线、东三环路等位置上,NOX排放在空间分布及排放强度上均吻合较好。以上源清单均基于2015年数据。
从五环路的总排放量测算,图8 中三者NOX排放量处在同一量级,且车载DOAS 的排放量落在了北工大源清单的误差范围内。具体看来,车载DOAS获取的NOX排放量较北工大源清单中NOX排放量高47.4%,较北京市交通委员会的业务化源清单中NOX排放量高84.4%。
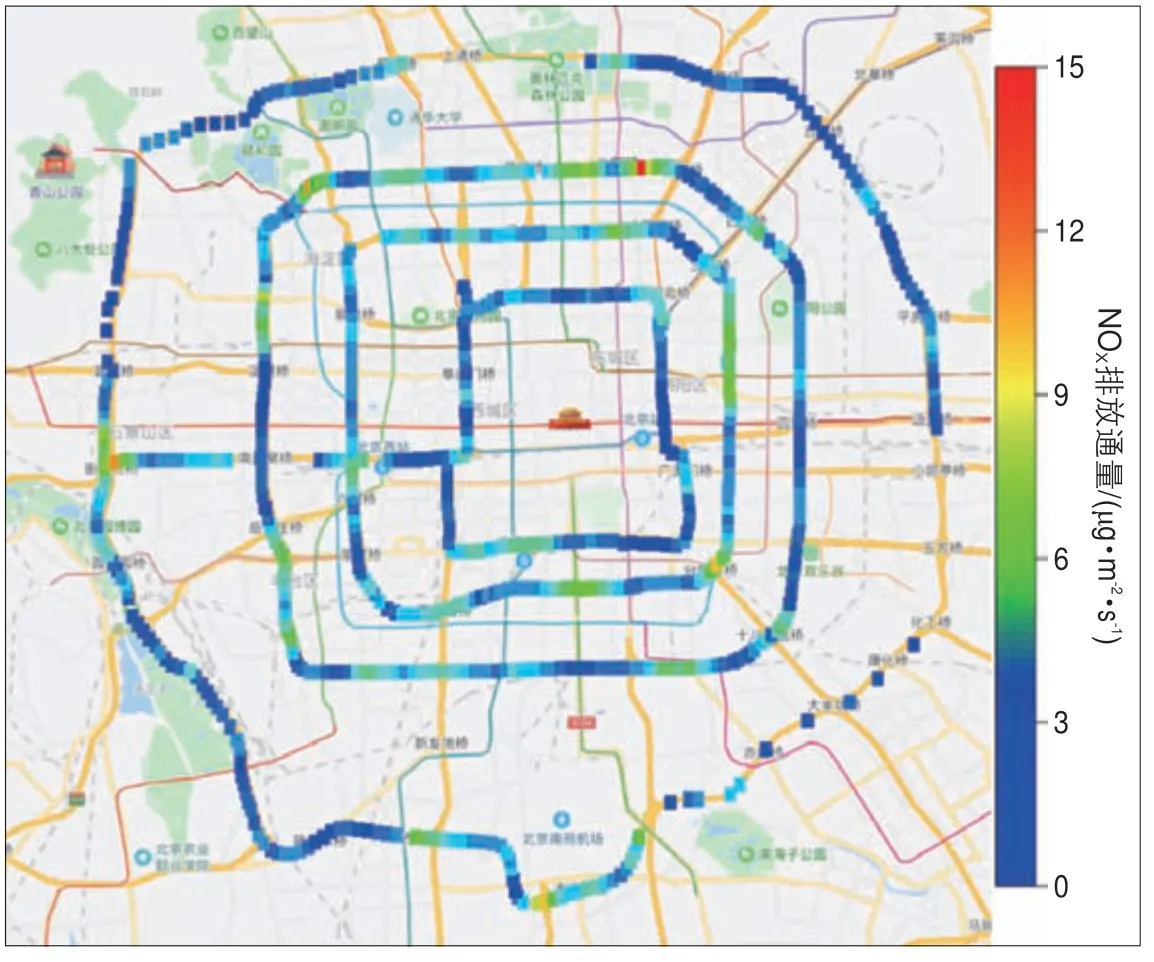
图6 五环路内快速路网车载DOAS观测路径上NOX排放通量Fig.6 NOX emission flux on the mobile DOAS observation path within the Fifth Ring Expressway
为定量分析本研究与北工大源清单的差异,对原始的源清单做了进一步处理,通过格点化处理将源清单分布在空间分辨率为9 km×9 km的等尺度经纬网格内。

图7 北京市核心区域机动车排放量空间分布Fig.7 Spatial distribution of motor vehicle emissions in the core area of Beijing
从分布上,两者在东三环路及北四环路位置均存在NOX高排放源,而在其他位置高值点差异相对较大,五环路内的快速路网中二者相关性如图9a 所示,R2为0.44。车载DOAS获取的污染物排放量基于单日的车载观测数据,而北工大的排放量基于全年的统计数据,二者在数据来源上的差异是其相关性差的重要原因。此外,推测本研究由于车载路线覆盖范围不够,导致其部分排放源“热点”信息的缺失;北工大源清单基于交通量统计数据,缺少车辆怠速等相关信息,而机动车的污染气体排放主要发生在怠速期间。以上问题必然导致了两种通过不同方式建立的源清单在部分污染源位置及其排放源强度上存在一定差异。
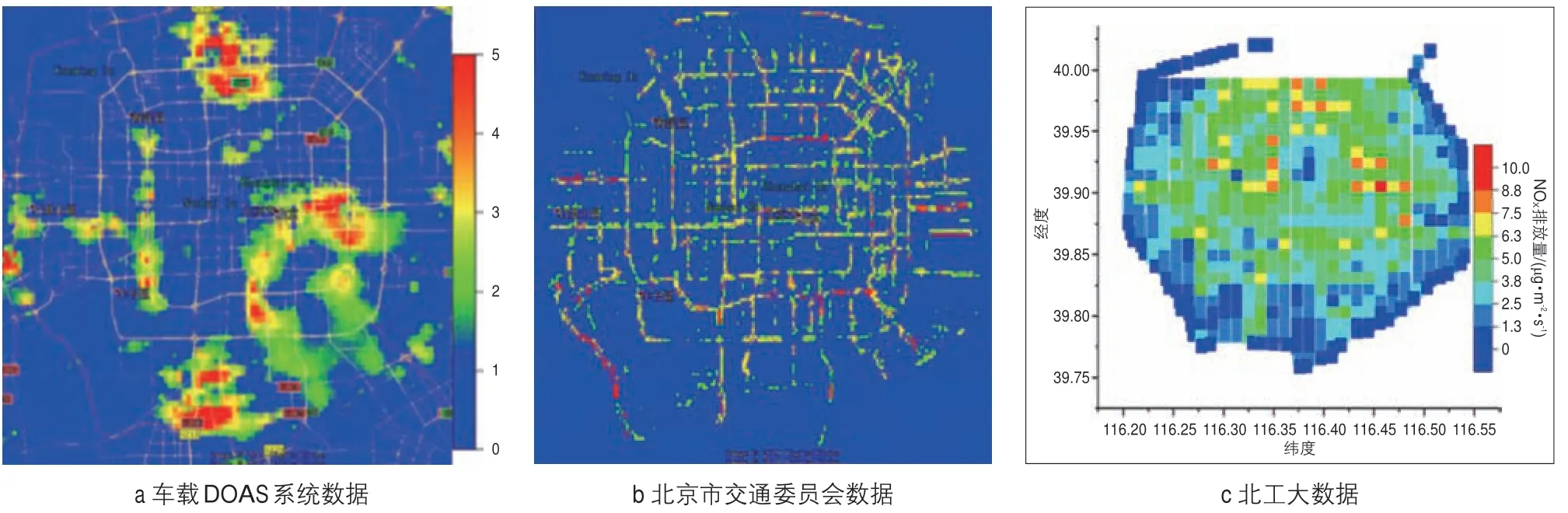
图8 不同系统获取的NOX排放量分布Fig.8 NOX emission distribution obtained by different systems
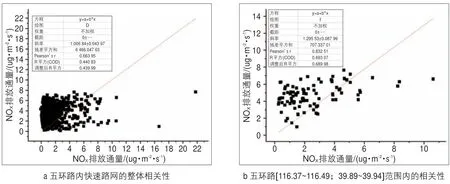
图9 北京不同空间范围内NOX源清单相关性Fig.9 Correlation of NOX source list in different parts of Beijing资料来源:文献[20]。
将对比区域缩小至[116.37~116.49,39.89~39.94]范围内,即包含了北四环路、东三环路等NOX排放量最高的几个位置做相关性分析,结果如图9b所示,R2为0.69。
4 结论
本研究为高时空分辨率源清单提供了一种快速有效的具有固有知识产权监测设备的高精准光学遥测方法,较传统的排放因子法具有实时、动态、高空间分辨率等特点,有效弥补目前在源清单获取手段上的不足。这不仅有助于认识污染源排放现状,也为污染物来源解析以及空气质量预警预报模型提供基础科学数据。该方法在交通排放监测上的应用目标是实现基于车载光学遥测技术的道路移动源NOX排放定量表征。
选择北京市五环路内快速路网开展对比研究,对比车载DOAS和排放因子法两种完全不同的技术路线获取NOX污染源排放量的差异。从车载DOAS、清华大学、北工大、北京市交通委员会等相关研究团队获取的NOX排放量来看,四者NOX排放量处在同一量级,且车载DOAS的排放量落在北工大源清单的误差范围内。具体看来,车载DOAS获取的NOX排放量较北工大源清单中NOX排放量高47.4%,较业务化源清单中NOX排放量高84.4%,与北京市交通委员会的源清单接近,相差3%。在空间分布上,将车载DOAS源清单同北工大源清单的对比区域设定在[116.37~116.49,39.89~39.94]范围内时,R2达0.69。
基于大量统计数据与经验或数值模型的排放因子法的定量表征方法,可以实现区域内全天候的污染气体排放模拟。鉴于不同的统计数据及不同的时空分配模型,不同模型获取的区域内排放细节会有所不同,越精细的数据来源会越逼近真实的模拟。基于光学遥测方法的定量表征方法将光学遥测与气象模拟相融合,可以实现观测区域内观测期间的污染气体排放估算。精细的观测路线可以实时获取区域内高空间分辨率的污染源排放细节,但受限于观测条件与观测设备数量,在监测参数与监测时段上会有所限制。
猜你喜欢
公民与法治(2022年7期)2022-07-22
农业灾害研究(2022年1期)2022-05-07
中国特种设备安全(2022年1期)2022-04-26
成都信息工程大学学报(2021年5期)2021-12-30
海洋通报(2021年5期)2021-12-21
环境卫生工程(2021年1期)2021-03-19
电子制作(2019年24期)2019-02-23
能源(2017年8期)2017-10-18
通信电源技术(2016年1期)2016-04-16
中国海洋大学学报(自然科学版)(2014年12期)2014-02-28