
检校场地物组成对LiDAR检校的影响研究
2019-05-07 03:16:04徐巍望德伟
城市勘测 2019年2期
徐巍,望德伟
(荆门市规划勘测设计研究院,湖北 荆门 448000)
1 引 言
随着相关技术的发展以及社会需求的不断扩大,机载激光雷达技术已经成为一种现今社会中比较流行的一种测量技术手段,机载激光雷达技术的发展使人们的数据获取方式从人工单点数据获取变为连续自动数据获取,又由于机载激光雷达传感器发射的激光脉冲能部分穿透树林遮挡,不受日照和天气条件的限制,能全天候对地观测。这些特点使得该技术在灾害调查与环境监测、海岸滩涂测绘、森林地区DEM获取、城市三维建模等方面得到广泛的应用[1]。
机载激光雷达系统是由多种设备组合而成的,暂时还没有达到真正的融合,因此在使用LiDAR系统之前,需要对这些设备进行校正,由于目前还缺乏统一的检校标准,机载LiDAR设备一般都还是作业单位独立完成的[2]。为了获取高精度的三维地表信息,就必须研究这些误差的影响,一些学者从不同的应用侧面对系统误差进行了分析和讨论,有的考虑了参考坐标系与IMU坐标系之间的误差[3],有的建立了误差源数据模型[4,5],有的考虑了激光扫描测距误差[6],大多数都是从机载激光雷达系统数据误差的校正,而很少针对校正场地的要求进行分析,本文将从检校场地地物的组成,对LiDAR数据检校精度的影响进行研究,并得出了对实际应用具有重要参考价值的结论。
2 安置角检校
2.1 安置角检校原理
LiDAR系统校准方法数学模型如式(2)。
(2)
式中,(X,Y,Z)大地坐标为激光扫描数据转换成大地坐标后的坐标值,(X,Y,Z)飞机坐标为机载GPS所记录的飞机实时大地坐标值,R旋转为飞机局部坐标系到大地坐标系需要的旋转矩阵系数,(△x,△y,△z)为在飞机局部坐标系内激光扫描中心与GPS天线的偏移,R安装误差为LiDAR系统安装角度误差,(lx,ly,lz)激光数据为激光扫描仪所记录的激光回波x,y,z为方向分量[7]。R安装误差还可以写成如式(3)形式:
(3)
式中,ω,φ,k分别是Roll,Pitch和Heading三个安装误差角度值。
2.2 侧滚角误差
侧滚角是由于惯性测量系统与激光扫描系统之间绕旁向方向的角度安置误差,测区航摄采用按照激光条带旁向重叠大于30%,首先假设航测地面是水平的,由于飞行过程中会受到侧滚角误差的影响,飞机在异向重叠飞行过程中会出现明显的侧滚角误差,扫描后会得到两条交叉型的点云条带。
2.3 俯仰角误差
俯仰角是惯性测量系统与激光扫描系统之间绕航向方向的角度安置误差,测区航摄采用按照激光条带航向重叠60%采集数据,若飞行过程中存在俯仰角误差,对向飞行的两条相邻航带扫描后得到的数据,同一地物点就会提前或延后出现,在平地上飞行方向相反的同一航线上的同一位置不会有高程的差异,而在树木或尖顶房屋飞行方向相反的同一航线上会有高程的差异。
2.4 航偏角误差
航偏角是惯性测量系统与激光扫描系统之间垂直于航向方向的角度安置误差,航偏角误差会影响物体的形状也会改变扫描物体中心的位置,通常情况下,航偏角偏移会使飞机左侧或右侧的点提前出现,会产生航偏角误差,在检校过程中,如果取两条平行相邻的同向航线从地物的左右两侧飞过时,可以得到该点坐标沿飞行方向的水平位移。
3 检校流程
3.1 作业流程
选择具有不同地物组成的场地进行LiDAR系统检校数据获取,比较不同地物组成对检校结果的影响,设计思路如下:
3.2 场地选取
选择一块检校试验场地,试验场地中包括平坦公路、较平坦土路、草地、树木、尖顶房屋、平顶房屋等尽可能多样的地物类型,主要考虑以下几种因素:①考虑飞行便利,有明显地物或检查点,靠近机场最好。②选择反射率较高的地物类型,避免大面积水域等。③选择有平坦道路,并有明显高低起伏的地物,例如尖顶房屋。④场地面积不小于 4 km2。
3.3 航线设计
设定如图1所示飞行航线进行安置角误差检校:
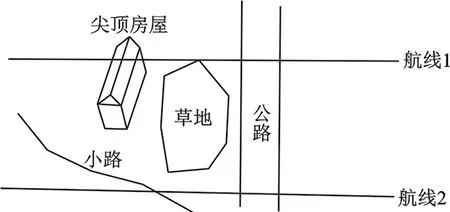
图1 安置角在航检校图
其中航线需要满足的要求:
①垂直于道路方向,并且异向重叠的两条航带;
②垂直于尖顶房屋的屋脊线,异向重叠的两条航带;
③垂直于尖顶房屋屋脊线方向,平行同向重叠的两条航带;
④平行于道路方向的两条航线。
航测数据采集过程中需要注意的几项:
①保证检校飞行与测区飞行一致;
②可以用GPS沿道路布设检查点,且检查点需分布在高程变化不大且明显的位置(例如学校操场)。
4 数据分析
4.1 侧滚角误差分析
分别对小土路、草地、平直公路进行检校试验,截取的三种地物的激光剖面如图2~图4所示。

图2小土路进行Roll值检校

图3 草地进行Roll值检校

图4 平直公路进行Roll值检校
由图2、图3、图4表明,小土路一般不长,且局部可能会出现地形起伏,较难实现两条土路的较好吻合,草地区域表面粗糙,激光反射比较分散,更难以实现检校,平直公路具有较高的激光反射率,地形相对平坦,受Pitch和Heading误差的影响较小,较易实现Roll值的检校。
综上所述,人工修建的较宽较长且平直的公路最适于Roll值的检校。
4.2 俯仰角和航偏角误差分析
分别对高程起伏较大的独立地物进行数据分析,这里取独立树和形状不同的屋顶进行校准试验,图5、图6为截取的独立树和屋顶的剖面。

图5树木进行Pitch、Heading值校准

图6 屋顶进行Pitch、Heading值校准
由图5、图6表明:独立树边界不易确定,且不易获取其特征点,两次扫描的激光数据可比性不强,难以实现两次数据吻合,坡度较小的屋顶扫描点数据相对位置关系不好确定,相比之下,人字形的房屋顶较为合适,缺点就是面积较小,激光反射点较少。
综上所述,在进行Pitch和Heading值检校时,尽量选取坡度较大人字形的尖屋顶。
5 结 语
本次试验表明,系统检校飞行需要选择满足一定条件的场地来进行,检校场地物组成不同,将直接影响到检校参数的解算精度和解算速度,因此,开展检校场地物组成对检校精度的影响研究非常有必要,对实际工作有很大的指导作用,随着机载激光雷达技术的不断推广,该技术也在市场上运用地也越来越多,因此,需要寻找更快速更简单的检校方法,该方法也存在一定的问题,一些新的高效的方法还有待于研究和尝试。另外,由于每次飞行都需要对系统进行检校,比较烦琐且工作量较大,更简便更准确地获取检校参数将是新的研究课题。
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
测绘通报(2019年4期)2019-05-10 08:16:20
物理教学探讨(2018年1期)2018-02-13 09:26:52
西湖(2017年8期)2017-08-09 22:25:34
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45
创新作文(小学版)(2016年30期)2016-02-28 18:25:13
铁道建筑(2010年11期)2010-07-30 02:04:04
