路口车辆冲突与碰撞的安全边界条件模型
2019-04-29 08:04:30朱西产廖茂竹
天津师范大学学报(自然科学版) 2019年2期
武 彪,朱西产,廖茂竹,刘 瑞
(同济大学 汽车学院,上海 201804)
路口是多方向车辆行驶的交汇区域,其道路环境和交通情况非常复杂,因此路口区域内交通事故频发且后果也较严重.根据相关数据统计,路口发生的交通事故占交通事故总数的30%以上.因此,研究路口车辆轨迹交汇问题,并基于危险程度建立安全边界条件模型,对提高路口区域安全性和通过效率具有重要意义.文献[1]基于自然驾驶数据,利用DREAM(Driving reliability and error analysis method)方法分析了典型路口危险场景的诱导因素.文献[2]分析了城市路口的诸多安全因素,通过模型拟合对路口的通行风险进行了评价,并结合安全系数对车辆进行导航.文献[3]利用试车跑道试验对本车左转、对车左转场景的驾驶员行为进行了分析,划分出了驾驶员的紧张域和舒适域.文献[4]利用场地测试的数据分析了驾驶员对两车交汇的不同时间间隙的接受程度.本文采用车辆碰撞剩余时间(Time to collision,TTC)和预估通行侵入区域时间差(Estimating post encroachment time,EPET)对不同类型的路口碰撞场景进行了动态特性分析,借助危险等级评价模型,利用逻辑回归方法,建立路口安全边界条件模型.针对本车直行、对车左侧直行(Across path across path/Left side direction,APAP/LSD)和本车左转、对车左侧直行(Left turn across path/Left side direction,LTAP/LSD)2种路口场景,具体计算出路口场景安全边界条件.通过仿真实验验证了模型的有效性.
1 路口场景安全边界条件模型
1.1 车辆动力学参数TTC和EPET
对于直行车辆驾驶状态的危险等级,一般使用碰撞剩余时间(TTC)和距离前车时间(Timeheadway,THW)2个参数进行评估[5].TTC和THW的计算公式见式(1)

其中:Δd表示2车之间的距离;v1表示本车速度;v2表示目标车辆速度.
随着TTC和THW数值的降低,车辆行驶状态的危险等级上升,当TTC和THW数值为0时,碰撞事故发生.
路口区域存在车辆轨迹的交汇地带(称之为侵入区域(Encroachment zone,EZ)),如图1所示,此时TTC和THW无法直接使用,需要使用预估通行侵入区域时间差(Estimating post encroachment time,EPET)[6]对路口交通碰撞场景进行评估.
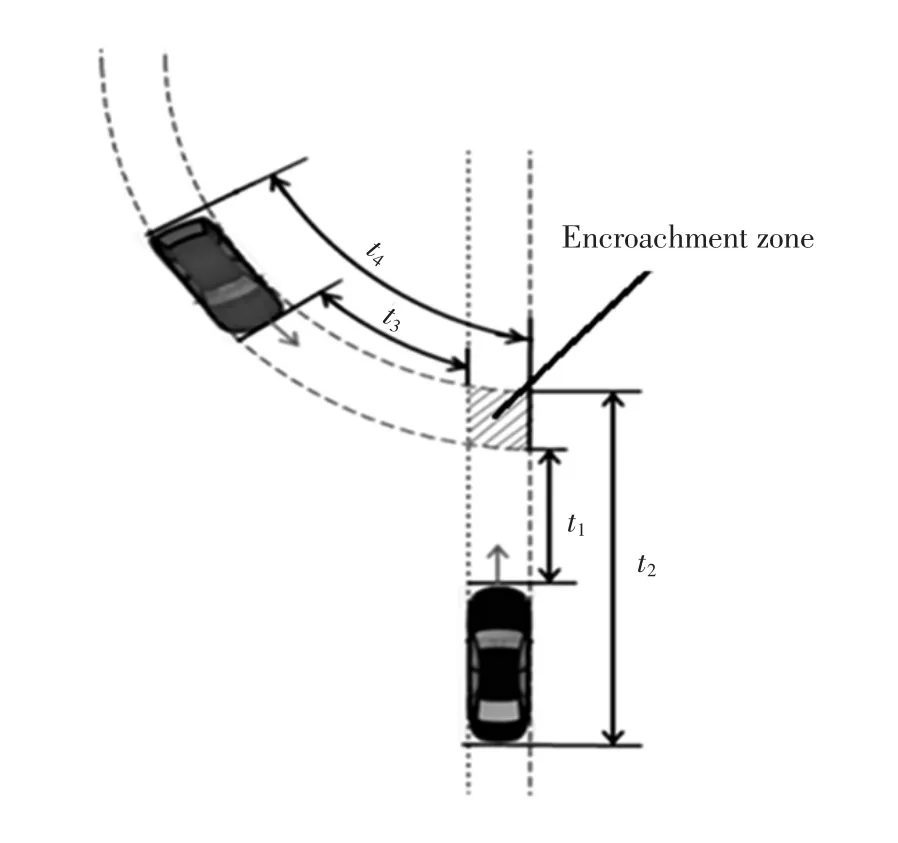
图1 路口区域车辆轨迹交汇区域与时间差Fig.1 Trajectories and time of vehicles in intersection collision
EPET定义为前车离开路口区域与后车进入路口区域的时间差,其计算公式为

其中:t1和t2分别为本车进入和驶离侵入区域的时刻;t3和t4分别为目标车辆进入和驶离侵入区域的时刻.在车辆未全部进入侵入区域前,每个时间节点都对应相应的EPET参数.碰撞发生前,如果本车先驶离侵入区域,则EPET=t3-t2,EPET>0;如果目标车辆先驶离侵入区域,则EPET=t4-t1,EPET<0;当EPET=0时,则碰撞事故发生.侵入区域面积与冲突车辆的宽度相关,为了精准计算TTC和EPET参数,模型计算过程中需要考虑车辆的长度和宽度.
1.2 危险等级评价模型
采用文献[7]提出的驾驶员行为自动检测方法评价危险等级.该方法基于车辆的纵向加速度、横向加速度以及横摆加速度来表征车辆行驶状态的危险等级,具体指标见表1~表3[7].

表1 根据纵向加速度定义危险等级Tab.1 Risk level determ ined by longitudinal acceleration

表2 根据横向加速度定义危险等级Tab.2 Risk level determ ined by lateral acceleration

表3 根据横摆角速度定义危险等级Tab.3 Risk level determ ined by yaw rate
1.3 逻辑回归预测模型的建立
根据驾驶员在行车过程中的心理状态和实际安全状况,可将以碰撞点为终点的驾驶员的正常行车过程划分为4个区域:舒适域、非舒适域、危险域和碰撞缓解域[8],如图2所示.

图2 驾驶员行车过程的安全状态图Fig.2 Driving safety situation progress
在大多数情况下,驾驶员都处于舒适域,行车的安全程度很高.但在某些情况下,行车过程会进入非舒适域,此类工况定义为冲突类工况,其危险程度较低,出现频率高,一般通过自然驾驶数据库进行采集和分析.危险域的危险程度更高,一般驾驶员不会主动进入这一区域,当意外进入这一区域后,都会主动通过制动减速等措施返回到更安全的区域.危险域的右侧边界为安全域边界,越过这一边界后,行车状态的危险程度将非常高,碰撞将不可避免,只能缓解碰撞带来的后果,所以安全域边界到碰撞点的区域称为碰撞缓解域,此类工况定义为碰撞类工况,此类工况危险程度高,出现频率低,需要专业的团队对交通事故现场进行勘察鉴定,从而整理复现交通事故场景.
为构建出比较完整的路口安全边界条件模型,需要对包括车辆冲突类工况和碰撞类工况在内的整个行驶全过程进行综合考虑和分析.
逻辑回归预测基于一个或多个变量(数值或分类)进行预测分析.本文采用参数TTC和EPET作为变量构建车辆行驶状态危险等级的边界条件模型,具体模型为

其中:x1为TTC参数;x2为EPET参数;θ0、θ1、θ2为线性回归系数;hθ(z)为逻辑回归输出.以hθ(z)=0.5作为判断标准,当hθ(z)<0.5时,表明车辆当前状态为冲突状态,驾驶员可采取相对柔和的制动减速操作避免碰撞事故;当hθ(z)>0.5时,表明车辆当前状态为碰撞状态,处于图2的碰撞区域,驾驶员必须采取紧急的制动减速操作,以降低碰撞损伤.
2 路口安全场景边界条件模型构建
2.1 数据库与典型场景的选择
本文采用的自然驾驶数据来源于中国实地运行试验数据库(The China field operation test,China-FOT),China-FOT主要收集了上海地区车辆行驶数据(包括道路环境数据),其中:64%来源于城区、30%来源于郊区、6%来自农村地区.China-FOT包含车辆的动力学参数(如速度与偏转角)、驾驶员控制输入(如制动踏板位置和方向盘转角)以及视频数据.
本文采用的交通事故数据来源于中国交通事故深入研究数据库(China in depth accident study,CIDAS).CIDAS中每个碰撞事故包含2 000多项数据,如道路环境数据、车辆数据、受伤治疗药物数据、事故调查与复现数据等.该数据库覆盖国内不同经济发展水平的城市,覆盖所有路况条件和地形.
对China-FOT采集的数据进行分段标签处理,通过危险等级评价模型筛选提取共得到778例冲突工况,其中40例发生在路口区域.在40例路口冲突工况中,本车直行、对车对向直行(Across path across path/Opposite direction,APAP/OD)占42%;本车直行、对车左侧直行(APAP/LSD)占34%;本车左转、对车左侧直行(LTAP/LSD)占15%;本车左转、对车对向直行(Left turn across path/Opposite direction,LTAP/OD)占5%.
在CIDAS数据库的1 200例碰撞事故中,路口事故为313例,占碰撞事故总数的26%.在128例路口左侧路权碰撞场景中,APAP/LSD占据最高比例49%,LTAP/LSD比例为29%,本车右转、对车左侧直行(Right turn across path/Left side direction,RTAP/LSD)比例为14%.在185例路口右侧路权碰撞场景中,本车直行、对车右侧直行(APAP/RSD)占据最高比例67%,本车左转、对车右侧直行(LTAP/RSD)比例为14%,本车右转、对车右侧直行(RTAP/RSD)比例为13%.
基于数据的质量和数量,本文选择APAP/LSD和LTAP/LSD 2种典型的路口场景,基于上述已构建的路口场景安全边界条件模型,通过分析计算确定上述2种场景的边界条件模型.
2.2 APAP/LSD路口场景
基于63个CIDAS碰撞类工况和14个China-FOT冲突类工况,得到APAP/LSD路口场景中TTC和EPET分布,如图3所示.
利用机器学习算法,对图3中77个数据点进行逻辑回归,得到各项回归系数分别为θ0=3.543,θ1=-1.879,θ2=0.635,由此得到APAP/LSD的安全边界条件模型为


图3 APAP/LSD路口场景TTC参数与EPET参数分布Fig.3 EPET and TTC for APAP/LSD intersection scenario
2.3 LTAP/LSD路口场景
基于37个CIDAS碰撞类工况和7个China-FOT冲突类工况,得到LTAP/LSD路口场景中TTC和EPET分布,如图4所示.
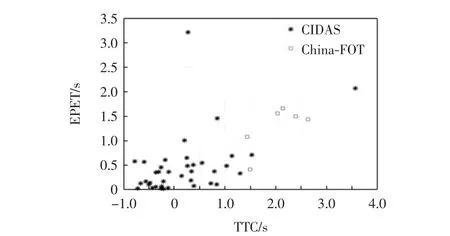
图4 LTAP/LSD路口场景TTC参数与EPET参数分布Fig.4 EPET and TTC for LTAP/LSD intersection scenario
利用机器学习算法,对图4中44个数据点进行逻辑回归,得到各项回归系数分别为θ0=3.597,θ1=-0.596,θ2=2.212,由此得到LTAP/LSD的安全边界条件模型为

3 路口安全场景边界条件模型验证
基于路口车辆冲突的危险性,本研究采用模拟仿真方法对路口碰撞场景进行真实复现,进而针对路口安全场景边界条件模型进行验证分析.
路口车辆碰撞事故场景仿真模拟包括路口环境的真实复现和车辆动力学模型精准构建.其中路口环境采用PreScan仿真软件进行复现,场景覆盖车辆类型、行驶轨迹、路口类型、车道数数目、交通信号灯、周边建筑、天气、光照等参数.车辆动力学模型通过CarSim仿真软件进行构建,其中涵盖车辆底盘、悬架、发动机等系统模块,其中本研究相关的制动系统模块需要基于不同的车辆类型进行精准构建.
车辆整体控制策略通过Matlab Simulink进行构建,将路口安全场景边界条件模型输入到决策算法区域(Decision algorithm),从而确定车辆采取制动操作的时间点.将整车控制策略与PreScan软件进行耦合,配合CarSim软件中的车辆动力学模型,构成系统性的闭环测试流程,对路口安全场景边界条件模型进行验证分析.
具体的仿真模拟流程为:(1)采用PreScan软件真实还原事故发生前5 s本车和目标车辆的运动状态及道路环境.(2)在Matlab中采用20 Hz频率实时计算本车和目标车辆的TTC和EPET动力学参数,并将其作为输入传输至车辆控制决策算法中.(3)基于路口安全边界条件模型,车辆控制决策算法对本车运动状态进行实时判断,当判定本车运行状态为碰撞状态时,车辆控制决策算法发出紧急制动指令.(4)基于CarSim软件中车辆制动模型,采用车辆真实的制动压力和路面附着系数,计算本车制动距离,判断本车是否会与目标车发生碰撞.该仿真模拟的基础设定条件为:(1)真实复现事故参与车辆(本车以及目标车)的初始状态,包括位置、速度、加速度.(2)通过安全边界条件模型探测到路口碰撞危险时,本车采取制动操作,目标车辆无制动或转向操作.(3)基于安全冗余考虑,车辆制动时采取最大制动压力作为输入.
在APAP/LSD场景中真实复现63个碰撞类工况,基于路口安全场景边界条件模型的控制获得车辆采取制动时刻的TTC和EPET参数分布以及最终时刻的本车状态(安全/碰撞),如图5所示.
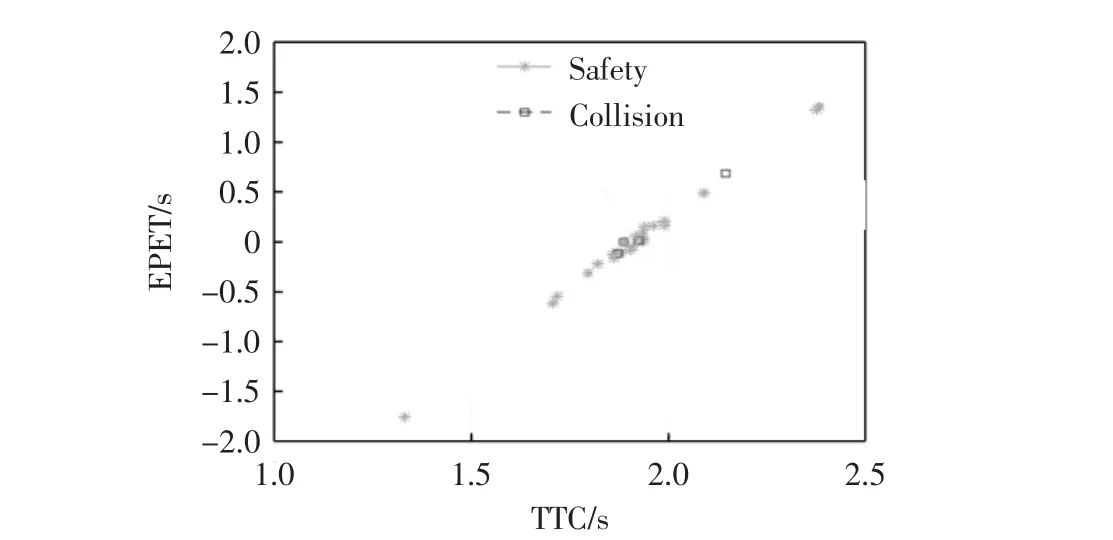
图5 APAP/LSD仿真模拟参数分布及车辆状态Fig.5 EPET,TTC and vehicle situation for APAP/LSD intersection scenario simulation
基于APAP/LSD路口安全场景边界模型的控制,63个碰撞工况中本车制动时刻的TTC参数分布在1.3~2.5 s的区间,与原碰撞工况相比,本车制动时刻平均提前1.3 s,表明该路口安全场景边界模型能够提前预警.最终时刻车辆状态结果表明,原63个碰撞工况中的59个避免了碰撞,路口碰撞事故率降低94%;对于无法避免的4个碰撞事故,本车碰撞时刻速度平均降低70%,真实碰撞速度和仿真碰撞速度对比见表4.
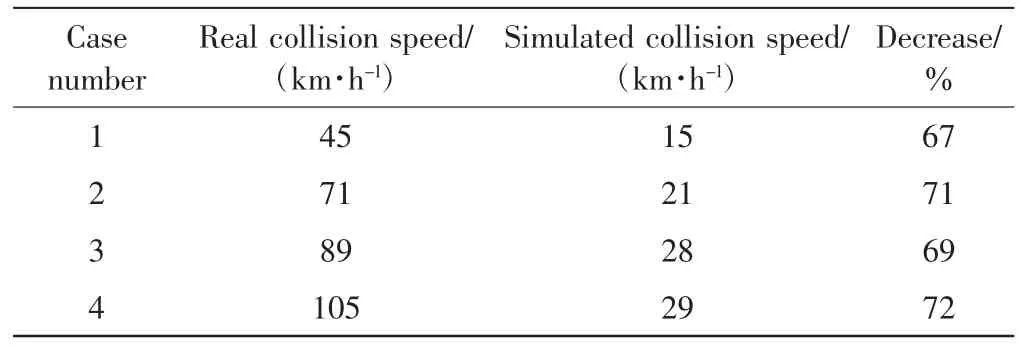
表4 APAP/LSD仿真碰撞速度分析Tab.4 Analysis of APAP/LSD simulated collision speed
在LTAP/LSD场景中真实复现37个碰撞类工况,基于路口安全场景边界条件模型的控制获得车辆采取制动时刻的TTC和EPET参数分布以及最终时刻的本车状态(安全/碰撞),如图6所示.
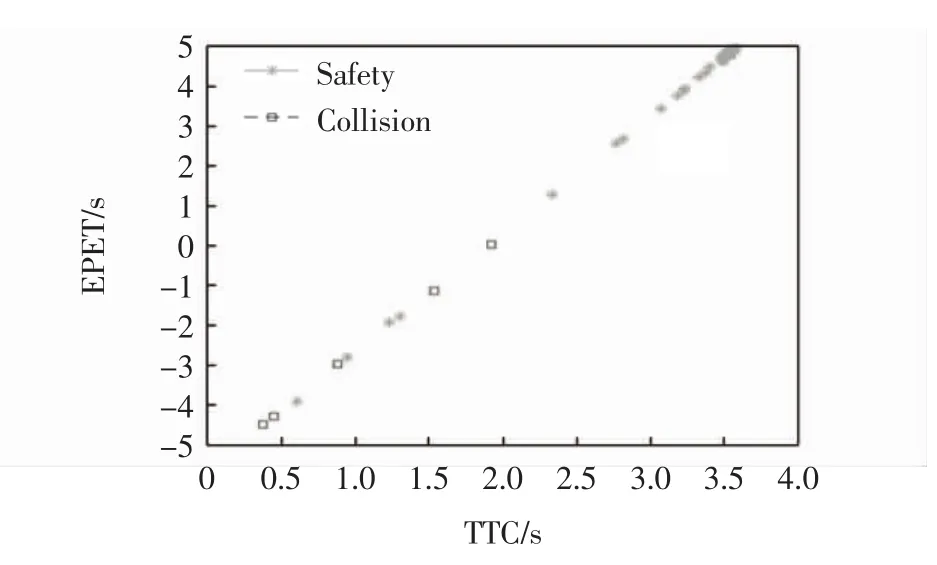
图6 LTAP/LSD仿真模拟参数分布及车辆状态Fig.6 EPET,TTC and vehicle situation for LTAP/LSD intersection scenario simulation
基于LTAP/LSD路口安全场景边界模型的控制,车辆制动时刻的TTC参数75%分布在2.0~3.7 s的区间,与原碰撞工况相比,本车制动时刻平均提前1.7 s,表明该路口安全场景边界模型能够提前预警.最终时刻车辆状态结果表明,原37个碰撞工况中的32个避免了碰撞,路口碰撞事故率降低86%;对于无法避免的5个碰撞事故,本车碰撞时刻的速度平均降低57%,真实碰撞速度和仿真碰撞速度对比见表5.

表5 LTAP/LSD仿真碰撞速度分析Tab.5 Analysis of LTAP/LSD simulated collision speed
4 结论
本文采用碰撞剩余时间TTC和预估通行侵入区域时间差EPET 2个动态特性参数,借助危险等级评价模型,利用逻辑回归方法,建立了基于车辆制动时刻的TTC参数和EPET参数的路口场景安全边界条件模型.使用China-FOT和CIDAS数据库,得到了本车直行、对车左侧直行以及本车左转、对车左侧直行2种路口场景的具体安全边界条件模型.通过仿真模拟对路口安全边界条件模型进行验证,分析评估其对于路口区域车辆行驶状态的影响,结果表明所建立模型可以有效避免碰撞或减轻碰撞损伤.
猜你喜欢
科学技术与工程(2022年30期)2022-12-05 12:43:50
机械设计与制造(2022年5期)2022-05-19 03:33:52
重庆大学学报(2021年12期)2022-01-12 02:56:56
应用数学(2020年4期)2020-12-28 00:36:38
数学物理学报(2020年5期)2020-11-26 06:06:30
小小艺术家(2018年1期)2018-06-05 16:55:48
新少年(2015年6期)2015-06-16 10:28:21
四川师范大学学报(自然科学版)(2015年1期)2015-02-28 14:07:21
作文与考试·初中版(2014年23期)2014-08-26 15:45:33
东北师大学报(自然科学版)(2014年1期)2014-02-27 08:02:09