基于码本匹配的手势指令识别
2019-04-29 06:10李玮
报刊精萃 2019年6期
李玮
长沙学院 湖南 长沙 410000
引言:手势识别作为先进人机交互技术的一项关键技术在现实社会中有广泛的应用。近年来对低成本的手势输入设备的研究越来越广泛,利用价格更为低廉的热释电红外传感器来设计手势输入系统,具有低数据量、数据处理简单快捷的优点,对基本手势数据易于分类,识别的精确度高。传感器中价位低廉的热释电红外传感器多用于人体的检测和定位中。Qi Hao 等人对基于热释电红外传感器的人体运动检测进行了相关的研究并提出了一些人体检测的算法[1]。R.Fuksis,M.Greitans 等人对热释电红外传感器在运动分析及远程控制系统中的应用进行了研究[2]。本文采用了传感器构建的手势指令输入平台,通过分析进行手势指令操作时的运动轨迹,提出了一种设计对应码本,并利用码本匹配法,来进行实时手势的方向识别方法。
1.手势指令预定义
手势输入部分的硬件采用了无线传感器网络中的人体定位节点模块来实现[3]。在一次指令操作中,手的运动可以分为三个过程:手掌从起点到达设备、手掌从设备上方划过、手掌离开设备至回到起点。在设计之前确定一些约束条件:规定手臂自然下垂的位置为起始点;每次指令的手势起始动作与终止动作应尽量保持一致;在感应区范围内,以直线的方式进行移动,尤其是在斜向方向上,应尽量保持与水平方向呈45°的运动路径。
2.手势指令码本



3.实验结果与分析
采集80 组手势输入指令数据,指令随机,并将每次动作对应运动方向记录下来,各路传感器输出数据经过处理后,与标准码本进行匹配,运行后得到匹配结果。由于各传感器之间距离较近,在执行方向指令时可能会引起误判为其他指令,如向右指令与右前指令在动作执行稍快的情况下,比较容易混淆。表1 列出了各个方向可能转移的概率情况,各方向之间误判的转移概率按下式计算:
错误执行方向次数/实际执行方向次数
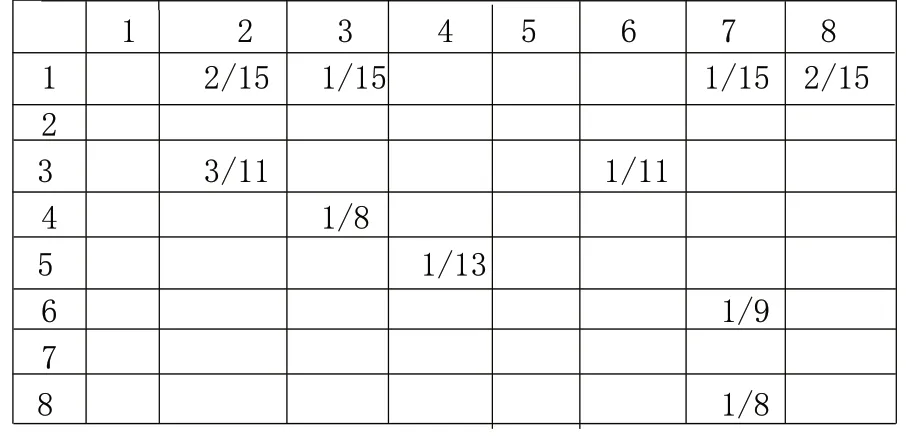
表1 向各方向的转移概率
4.结论
本文通过码本匹配法,设计并实现了基于热释电红外传感器的手势指令识别。不难看出,该方法具有快速便捷的特点。而误判概率与用户操作习惯有关,可以通过改善掩膜调制来降低。
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
学校教育研究(2020年11期)2020-06-08
红领巾·萌芽(2019年9期)2019-10-09
航空科学技术(2019年2期)2019-09-10
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
科技与创新(2019年2期)2019-02-14
小学阅读指南·低年级版(2017年6期)2017-06-12
数学大世界·小学低年级辅导版(2010年9期)2010-09-08