“二十四道拐”盘山公路车辆行驶轨迹研究
2019-04-22 00:18陈柳晓唐伯明
重庆交通大学学报(自然科学版) 2019年4期
陈柳晓, 唐伯明, 张 勃, 向 浩
(1. 重庆交通大学 土木工程学院,重庆 400074; 2. 重庆交通大学 马蒂亚斯国际设计学院,重庆 400074)
“二十四道拐”盘山公路凭借其特殊的时代背景及巧夺天工的线形设计享誉国内外。二战时其与滇缅公路、中印公路及“驼峰航线”共同组成了中国抗战的交通运输生命线。学者们通过对“二十四道拐”盘山公路的历史底蕴、文化内涵、人文情怀进行研究[1-9],赋予了这条抗战公路以鲜明的形象。其别具一格的展线方式及确保车辆行驶安全的能力同样值得学界深入研究。
笔者基于对“二十四道拐”盘山公路线形数据勘察和研究的背景,应用UC-win/Road仿真软件模拟了“二十四道拐”盘山公路真实场景。通过驾驶模拟分析车辆在“二十四道拐”盘山公路弯道路段的行车轨迹变化规律和行驶冲突区域,以验证“二十四道拐”盘山公路的行车安全性。
1 行驶轨迹对行车安全影响
车辆行驶轨迹是探究行车安全性的重要参数,该参数可用于表征车辆行驶过程中的驾驶行为和运行状态[10-12]。行驶过程中,驾驶员根据不同道路条件、交通状况、身体特性及车体性能,采取不同的行驶路线。在各类因素的综合作用下,可能会导致实际行驶轨迹与公路设计者所期望的线形轨迹不协调等情况出现。因此,驾驶员通常采用减速或者占据对向车道行驶以弥补车辆在转弯过程中产生的离心加速度,达到将车辆调整至驾驶员所期望的轨迹。
“二十四道拐”盘山公路受地形地质等因素限制,各弯道线形指标采用极限值甚至超出极限值情况,全线存在多处急弯陡坡、视距受限等安全隐患。我国公路线形设计指标是根据设计速度计算而得。针对盘山公路这一特殊案例,当超限指标若无法满足行车安全性,或驾驶员期望行驶特征无法与公路线形相一致时,容易诱发车辆碰撞、侧翻、翻落悬崖等恶性交通事故[13-14]。因此,笔者分析了“二十四道拐”盘山公路线形设计能否满足驾驶员所期望的行驶轨迹展线,连续弯坡组合能否有效引导车辆通行,这是评价“二十四道拐”行车安全性重要的依据。
2 实验设计
2.1 UC-win/Road软件
UC-win/Road是一款实时虚拟显示软件。通过电脑操作,能制作出如同身临其境的虚拟现实场景(Virtual-Real),从而为工程设计、施工和道路安全评估提供有力的技术支持[15]。
UC-win/Road的基本功能是利用简单操作生成公路、隧道、桥梁、河流、海洋、飞行路径等多种现实交通场景。通过输入道路平面线形、纵断面线形、定义断面形式、设置挖填方及材质、设置交通流及天气、模拟信号灯及道路障碍物等操作,可有效地实现道路仿真。
笔者利用UC-win/Road中的“LogPlugin.bpl”插件获得仿真数据。该插件主要功能是将驾驶车辆、驾驶车辆前方车辆和其他移动对象的信息通过csv文件、UDP流文件形式输出LOG数据表。LOG输出的开始和结束可手动或与场景同步,在完成驾驶模拟后,LOG数据表自动保存至安装文件夹,所得文件可以通过Excel表格打开。
2.2 GMC十轮大卡
“二战”时期,“二十四道拐”盘山公路上运输援华战略物资的载重货车为美式GMC十轮大卡(图1)。GMC十轮大卡基本参数为:GMC军方编号为CCKW-353,长度为6.93 m,宽度为2.32 m,高度为2.24~2.80 m,驱动引擎采用GMC270型4.4 L 6缸汽油发动机,输出功率最大为76.5 kW,最高行驶速度可达71 km/h,最大行驶里程为385 km。该车型爬坡性能良好,载重标准为2.5 t,即使托载两倍载重能力的大炮和8 t重炮弹时,仍能飞驰向前。

图1 GMC十轮大卡Fig. 1 GMC truck
笔者在仿真模拟时,依据GMC十轮大卡的性能参数设计了仿真车辆,用以还原“二战”时期援华物资在“二十四道拐”盘山公路上的行驶场景,如图2。

图2 GMC十轮大卡仿真车型Fig. 2 Simulation model of GMC truck
2.3 仿真场景建立
笔者多次前往贵州晴隆县对“二十四道拐”盘山公路线形参数及所处地形地貌进行勘察,并获得全线近4km的线形数据,共克服高差265 m,包括24个回头曲线,最小圆曲线半径8.125 m(第11拐)、最大纵坡14.7%(第6拐)。将获得的“二十四道拐”盘山公路基本线形参数输入到UC-win/Road中,并在对应位置处设立挡土墙、涵洞、排水沟、路标及道路附属物,最终建立的仿真场景如图3。

图3 “二十四道拐”盘山公路仿真效果Fig. 3 Simulation renderings of “24-zigs” mountain road
2.4 实验方案
利用UC-win/Road实现“二十四道拐”盘山公路3D建模后,笔者通过交通系统仿真研究了GMC十轮大卡在“二十四道拐”上的行驶特性。车型选用重货车,并设置其在“二十四道拐”盘山公路上的交通流情况。本实验所用样本容量为60,即共记录60组车辆行驶数据,每组数据分为上、下行两部分,完成60辆仿真车辆上行方向模拟驾驶后,进行下行方向模拟驾驶。具体实验流程如图4。

图4 仿真实验流程Fig. 4 Simulation experiment process
为较好地描述整条公路弯道路段行驶轨迹特性,实验数据采用断面观测法,即在完成所有实验车辆驾驶模拟后所得的LOG报告中筛选出每个弯道特定位置的观测断面。观测断面所截的行驶轨迹点与道路中心线横向距离反应该特征点的空间位置。因“二十四道拐”盘山公路修筑时并没有缓和曲线概念,因此选择断面不包含传统的ZH(直缓)、HY(缓圆)等点。为便于实验研究,笔者结合“二十四道拐”盘山公路实际情况在各个弯道上选取7个横断面数据,分别定义为A点(位于直线段驶入圆曲线前)、ZY点(直线段与圆曲线相接处)、B点(ZY与QZ的中点)、QZ点(圆曲线中点)、C点(AQ与YZ的中点)、YZ点(圆曲线与直线段相接处)、D点(位于圆曲线驶出后所接直线段上),将道路中心线定为基准线,各观测点间距相同,具体观测断面布置如 图5。

图5 观测断面布置Fig. 5 Observation cross-section layout
为简化数据与分析,笔者作如下说明:① 车辆在行车方向右侧车道上行驶,分别对上、下行的观测断面进行编号,其顺序与行驶方向相一致,如图6;② 行车轨迹由车辆行驶过程中重心位置连接所得的线形轨迹表征,并观测重心线形轨迹与基准线(道路中心线)间的偏移情况;③ 无论上、下行方向,车辆向道路中心线左侧偏移时,偏移量记为“负值”,向右侧偏移时,记为量取“正值”;④ 借鉴道路设计一致性评价中应用85%位车速作为特征值这一措施[16],选取第85%位行驶轨迹偏移量作为特征值,以分析上、下行方向各弯道路段不同观测点的行车轨迹分布规律;⑤ 考虑总体数据量较大,笔者仅选取半径为12 m以下的弯道(第7~19拐)进行数据分析,并将上、下行方向数据再分为左转弯和右转弯两类。

图6 观测断面编号示意Fig. 6 Numbering indication of observation cross-sections
3 弯道路段车辆行驶轨迹变化规律
3.1 上行方向行驶轨迹变化
仿真车辆行驶轨迹变化规律见图7,行驶轨迹在各弯道第85%位横向偏移量见表1。

图7 上行车辆行驶轨迹第85%位横向偏移量Fig. 7 85% lateral deviation of upstream vehicle driving trajectory
由图7可见:试验车辆上行过程中经过各弯道时,行驶轨迹横向偏移情况基本呈现同一趋势。车辆左转弯时,入弯至出弯过程呈现“左偏-右偏”,即车辆驶入圆曲线路段后产生横向偏移,在圆曲线路段内由“偏向对向车道”转为“偏向自身车道”,出弯时保持一定横向偏移,上行车辆左转弯过程中总体偏移量较小,均可在自身车道内完成转向;车辆右转弯时,入弯至出弯过程呈现“右偏-左偏”,入弯段横向偏移量较小,在圆曲线路段内大幅度偏向左侧(对向车道),其中在第7、9、11、13拐处横向偏移量较大,驶出弯道后同样有较大横向偏移量。
上行车辆转弯过程动态行驶过程总体呈现为由向弯道内侧偏移转为向外侧偏移。横向偏移量与半径值呈反比,图7(a)中第11拐横向偏移幅度显著大于其余弯道路段,观测断面4~5的横向偏移量差值达172.29 cm。该处弯道半径为全线最小值(8.125 m),最大纵坡可达13.64%。极限弯坡组合导致驾驶员在转弯过程中离心力加大,需时刻保持警惕和低速。
3.2 下行方向行驶轨迹变化
仿真车辆行驶轨迹变化规律见图8,行驶轨迹在各弯道第85%位横向偏移量见表2。
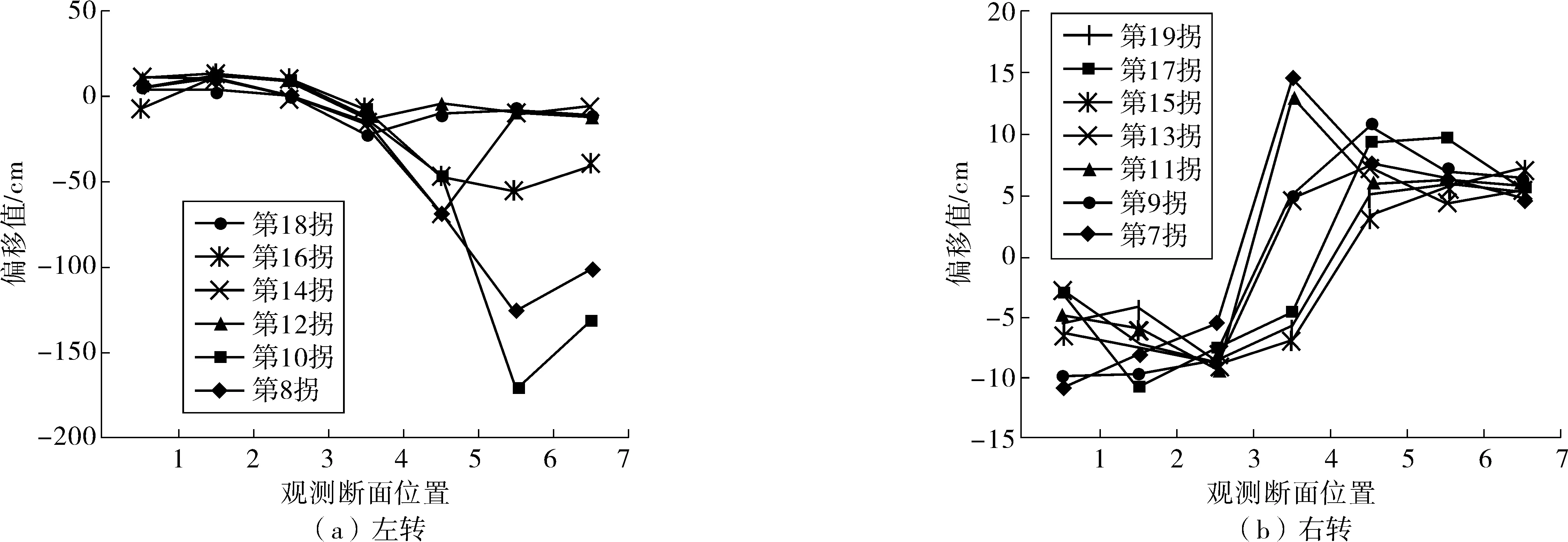
图8 下行车辆行驶轨迹第85%位横向偏移量Fig. 8 85% lateral deviation of downstream vehicle driving trajectory

由图8可见:试验车辆下行过程中经过各弯道时,行驶轨迹横向偏移情况基本呈现同一趋势。车辆左转弯时,入弯至出弯过程呈现“向左偏移”的趋势,入弯时横向偏移量较小,但出弯时横向偏移量发生突变,由“在自身车道内行驶”转为“偏向对向车道”,第8、10拐出弯时该现象显著;车辆右转弯时,入弯至出弯过程呈现“左偏-右偏”,即车辆驶入圆曲线路段后由左偏转为右偏,出弯时保持一定的横向偏移,总体偏移量较小,车辆均可在自身车道内完成转向。
下行车辆转弯过程的动态行驶过程总体呈现为由向弯道外侧向内侧偏移。车辆在第10拐处出弯时横向偏移幅度显著大于其余弯道,观测断面4~6的横向偏移量差值达157.07 cm。该处弯道半径为10.40 m,最大纵坡达13.17%。此外,这一弯道与其垂直方向对应弯道(第13拐)高差为8.44 m,车辆行驶过程中需通过减速减小离心力、爬坡及上方弯道影响。
4 弯道路段行车冲突区域分析
“二十四道拐”盘山公路因位处垭口地段,受地形限制存在转弯半径、行车视距与路段的运行速度不匹配情况。基于上述对“二十四道拐”盘山公路行车特性分析可知:车辆通过小半径弯道路段时,会采取占用对向车道实现转弯,由此保证其行车安全和较高运行效率。这一行为将导致双向车道内行驶轨迹出现相交区域,亦即行驶轨迹冲突区域[17]。对向车辆行驶轨迹相交易诱发车辆刮擦、碰撞甚至翻车等严重事故。
4.1 上、下行方向行驶轨迹对比
通过分析车辆上、下行过程中各观测断面的行驶轨迹规律,获得各弯道行车冲突区域。为表征最不利行车冲突情况,提取各观测断面最大偏移值进行分析,下行方向各断面编号转与上行方向对应,以下分析过程中断面编号以上行方向为主。
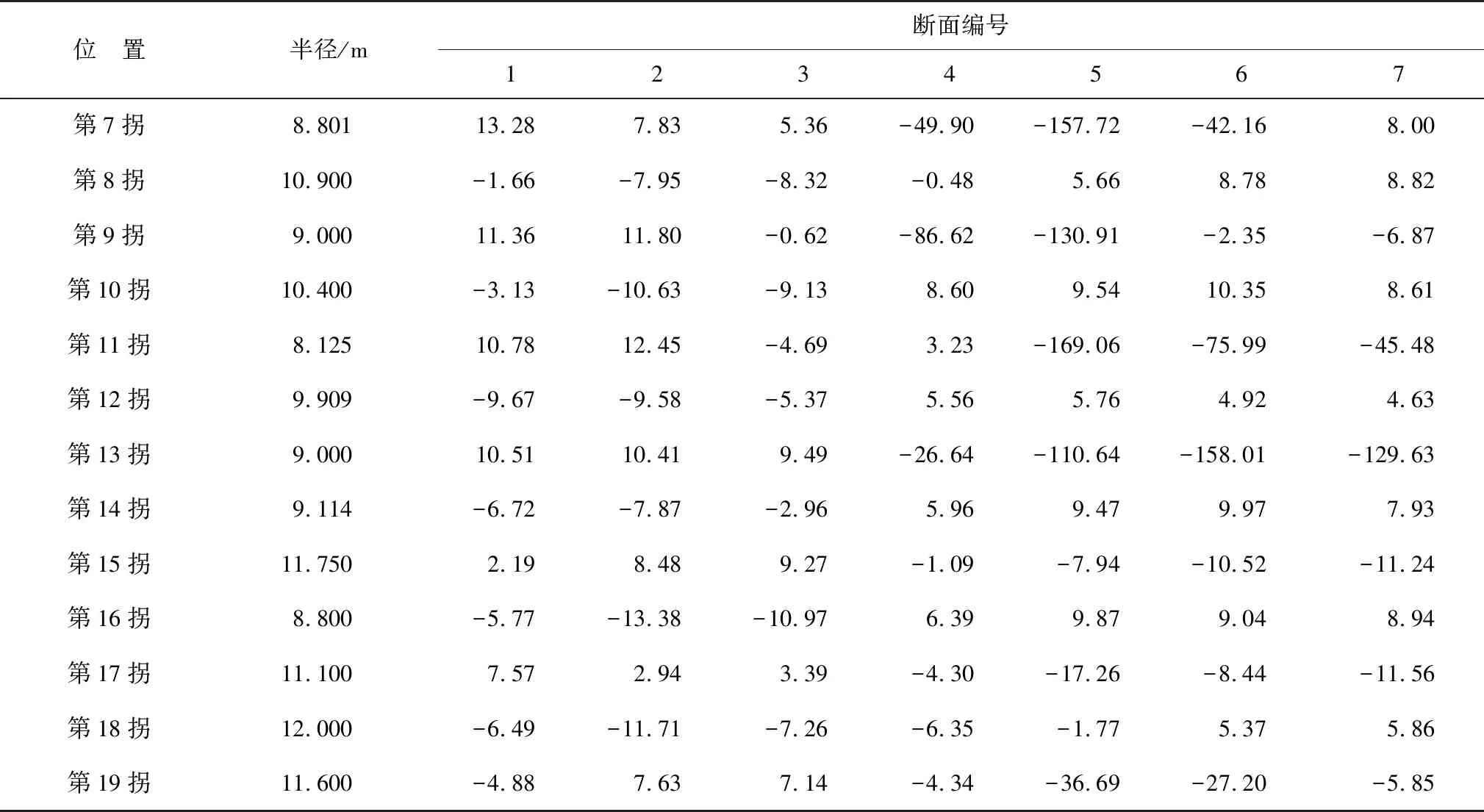
由弯道路段车辆行驶轨迹变化规律可知:车辆在第7、8、9、10、11、13拐处上下行驶时存在较大偏移量。笔者统计这6拐处的各观测断面最大偏移量如表3,通过对比这6拐处上、下行方向各个断面行驶轨迹偏移量,得到各拐处上、下行方向的最大偏移量变化曲线如图9,从而分析行驶轨迹冲突区域。

表3 各弯道最大横向偏移量 Table 3 The largest lateral deviation of each curve cm
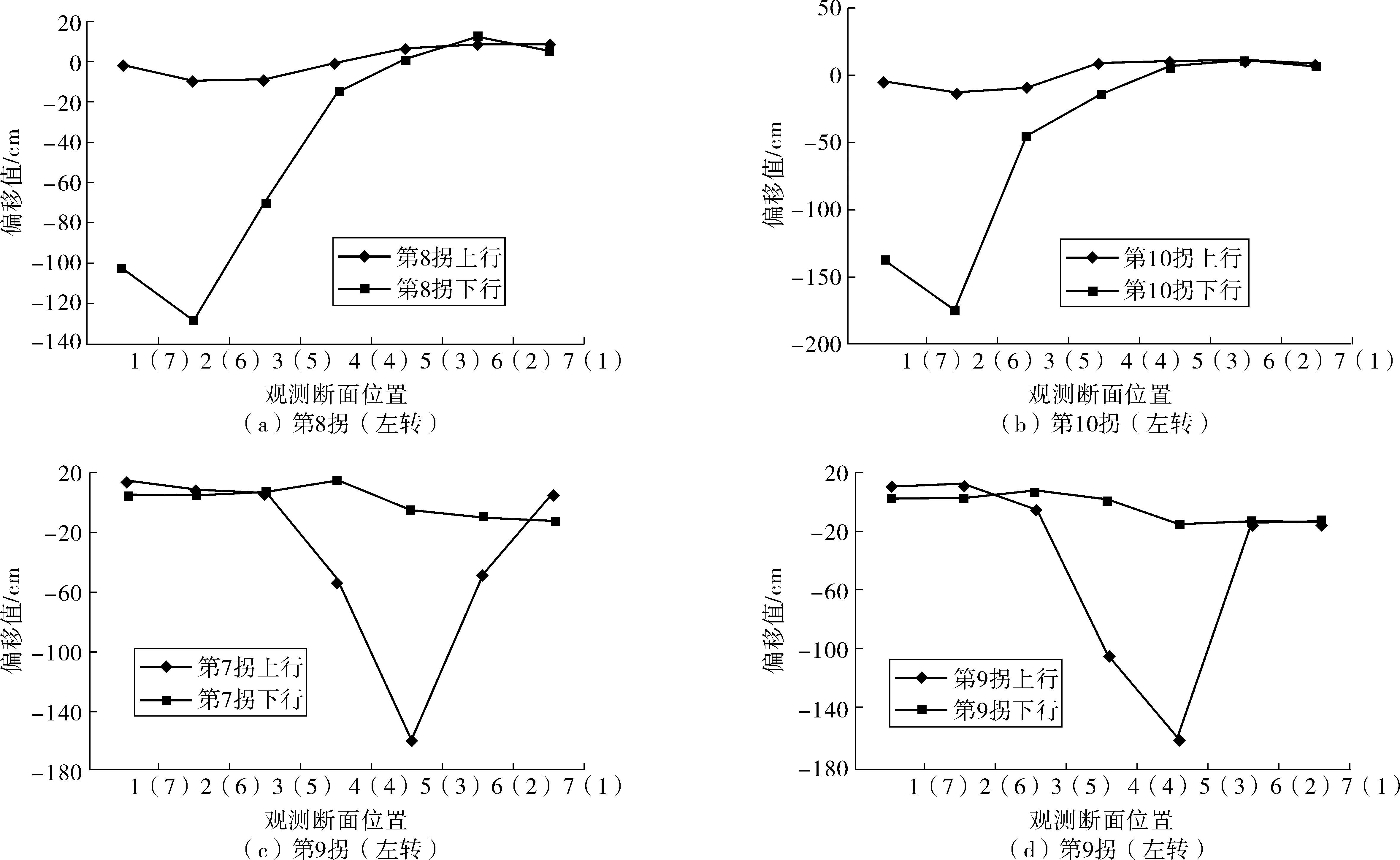

图9 各弯道最大横向偏移量Fig. 9 The largest lateral deviation of each curve
由图9(a)、(b)可看出:小半径弯道中,车辆左转弯时位于入弯路段的冲突较大,从观测断面1开始,对向行驶的车流逐渐相交,通过断面3后两车流再次回到自身车道,其中断面2处上、下行方向车流冲突最大。由图9(c)~(f)可知:车辆右转弯时位于出弯路段冲突较大,由断面4起,双向车流逐渐相交,通过断面6后两车流再次回到自身车道,其中第7、9、11拐断面5处上、下行方向车流冲突最大,第13拐观测断面6处上行方向与下行方向车辆存在的冲突较大。
4.2 “二十四道拐”盘山公路行车冲突区域分析
基于对“二十四道拐”盘山公路各弯道路段行车轨迹规律分析,当双向行驶车辆在同一断面产生横向偏移时,第10、11拐两弯对向车流交织情况最为不利。因此,选取第10、11拐横向偏移数据绘制上、下行方向车辆行驶轨迹线,如图10。

图10 弯道路段车辆行驶轨迹示意Fig. 10 Driving trajectory indication of vehicle in curved section
通过双向车辆行驶轨迹示意,可获得对向交通流冲突区域(图11)。

图11 弯道行车冲突区域示意Fig. 11 Indication of conflict zones on curved roads
根据图11可知:上、下行方向对应的行车冲突区域存在差异。以左转弯为例,上行方向对向车辆的主要冲突区域位于断面1、2,即车辆初始入弯道时容易与对向车辆产生轨迹交叉;下行方向对向车辆的主要冲突区域位于断面2、3,即部分车辆驶入圆曲线时,占用对向车道完成转向。而大部分车辆基本能在自身行驶车道内完成转弯。
“二十四道拐”盘山公路修筑于“二战”时期,修路过程存在勘测手段有限、筑路器械匮乏、爆破火药短缺、人力资源不足等问题;再加之该路地处晴隆山与磨盘山之间的垭口地带,地形复杂且展线困难。因此,就地选线“二十四道拐”是当时最为妥善的方案。在诸多不利因素作用下,该公路线形设计与车辆行驶轨迹实现最大程度契合,尽可能地为确保战时物资及时运至前线,为抗战胜利争取了宝贵的时间。
5 结 论
1)采用UC-win/Road模拟驾驶行为,分析了车辆在“二十四道拐”盘山公路上的行驶轨迹特性。全线大部分弯道能实现车辆在自身车道内完成转弯。第7~11、13拐处其横向偏移量相对较大。其中,第10、11拐线形指标超出设计规范极限值,其侧向位移分别达172.29、157.07 cm。
2)由行驶轨迹特性可明确各弯道路段行车冲突区域。上行行车入弯直线段,下行行车出弯圆曲线段,对向车辆发生冲突可能性较大。驾驶员在通过这两处弯道时,需时刻保持警惕,注意对向来车并控制自身行驶速度。
3)笔者结合前期对“二十四道拐”盘山公路线形设计一致性分析及事故预测,证明了当线形设计采用极限指标及超限指标时,“二十四道拐”盘山公路能较好保证战时援华物资运输车辆的行车安全,能为现阶段山区高速公路修筑提供设计启示和技术借鉴。
猜你喜欢
地理空间信息(2022年3期)2022-04-01
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
铁道建筑技术(2020年11期)2020-05-22
数学大王·低年级(2019年8期)2019-08-27
儿童故事画报·智力大王(2018年4期)2018-11-02
计算机辅助工程(2018年4期)2018-10-09
自然资源遥感(2018年3期)2018-09-04
制造技术与机床(2017年7期)2018-01-19
青少年科技博览(中学版)(2016年4期)2016-08-02